You might also like
- Citibank StatementDocument2 pagesCitibank Statementsfhui100% (2)
- Chapter 14 - HW With SolutionsDocument6 pagesChapter 14 - HW With Solutionsa882906100% (1)
- Hewitt Chapter 3 Free Fall Note OutlineDocument5 pagesHewitt Chapter 3 Free Fall Note OutlineAsmaa AkraicheNo ratings yet
- Mathematics of GraphsDocument62 pagesMathematics of GraphsBea Santos BarrozoNo ratings yet
- Deg (V I) 2 M: Path Length Is The Number of Edges (N) That The Path ContainsDocument4 pagesDeg (V I) 2 M: Path Length Is The Number of Edges (N) That The Path Containsgoflux pwnsNo ratings yet
- Spanning TreeDocument15 pagesSpanning TreeNishtha DhariwalNo ratings yet
- Cambridge Standard 12 Chapter 2Document20 pagesCambridge Standard 12 Chapter 2Raymond Zhu100% (1)
- D1 PDFDocument6 pagesD1 PDFRachana RaveendraNo ratings yet
- Lecture 02Document3 pagesLecture 02areslane djenderNo ratings yet
- FlashcardsDocument4 pagesFlashcardsArshad KhanNo ratings yet
- OCR D1 Revision SheetDocument5 pagesOCR D1 Revision Sheetnsph2326No ratings yet
- Graph Theory Soln PDFDocument10 pagesGraph Theory Soln PDFANDRE LIM BU YUN Year14No ratings yet
- Graphs: Kok Boon Shiong JTPDocument45 pagesGraphs: Kok Boon Shiong JTPPuteri Qani'ahNo ratings yet
- Math PPT FinalDocument33 pagesMath PPT Finalteamthesqard21No ratings yet
- Group 06Document16 pagesGroup 06indula123No ratings yet
- Graph Theory (Module 3) PDFDocument24 pagesGraph Theory (Module 3) PDFZoya QadriNo ratings yet
- Graphs:: Undirected Graphs Have Edges That Do Not Have A Direction. The Edges Indicate A TwoDocument4 pagesGraphs:: Undirected Graphs Have Edges That Do Not Have A Direction. The Edges Indicate A Twoayesha abidNo ratings yet
- Graph: By: Deepak Kumar SinghDocument55 pagesGraph: By: Deepak Kumar Singhसुरज पौडेलNo ratings yet
- Mathematics of GraphsDocument30 pagesMathematics of GraphsdarylNo ratings yet
- Mathematics of GraphsDocument44 pagesMathematics of Graphsanon_298904132No ratings yet
- Lecture 01Document26 pagesLecture 01Waqar RoyNo ratings yet
- Chapter 6 - DSDocument67 pagesChapter 6 - DSpruthvirajdesai204No ratings yet
- Graph Theory (Lesson)Document22 pagesGraph Theory (Lesson)Princess GinezNo ratings yet
- Ecient Minimum Spanning Tree Construction Without Delaunay TriangulationDocument6 pagesEcient Minimum Spanning Tree Construction Without Delaunay TriangulationlkngeeNo ratings yet
- Unit 4Document71 pagesUnit 4Shikhar AshishNo ratings yet
- Graph and Tree-2021Document9 pagesGraph and Tree-2021Osama AlzakyNo ratings yet
- W13 - Module 014 Mathematics of GraphsDocument3 pagesW13 - Module 014 Mathematics of GraphsJL Santiago BarengNo ratings yet
- Chapter 8, Part I: Graph AlgorithmsDocument24 pagesChapter 8, Part I: Graph AlgorithmsGhanshyam ShahNo ratings yet
- Decision Mathematics RevisionDocument3 pagesDecision Mathematics RevisionRyanSparks94No ratings yet
- Tutorial On Spectral ClusteringDocument26 pagesTutorial On Spectral Clusteringlennon757No ratings yet
- DMS-12 GraphsDocument45 pagesDMS-12 GraphsShykh IQraNo ratings yet
- 25 SpanningDocument8 pages25 SpanningKhushbakht QureshiNo ratings yet
- Graphs 1 PrintDocument11 pagesGraphs 1 PrintVarun SelvanathanNo ratings yet
- Euler GraphsDocument9 pagesEuler GraphsNAOMI MAE LUMIBAONo ratings yet
- The Mathematics of GraphsDocument3 pagesThe Mathematics of Graphspeejay de ruedaNo ratings yet
- Lecture 1Document43 pagesLecture 1Ali babaNo ratings yet
- Module 6Document40 pagesModule 6Kshitiz GoyalNo ratings yet
- Unit D1 - Decision Mathematics: The ExaminationDocument4 pagesUnit D1 - Decision Mathematics: The ExaminationSean Captain HonestlagoNo ratings yet
- Semis Handout Graph TheoryDocument5 pagesSemis Handout Graph TheoryJonel NaquitaNo ratings yet
- Graph Theory NotesDocument49 pagesGraph Theory NotesRupesh BhattaNo ratings yet
- Graph Theory HandbkDocument21 pagesGraph Theory HandbkEboka ChukwukaNo ratings yet
- Data Structure UNIT VDocument20 pagesData Structure UNIT VMogili sivaNo ratings yet
- Solutions1 3Document15 pagesSolutions1 3Peter ArmaosNo ratings yet
- Ada NotesDocument16 pagesAda NotesRenukaNo ratings yet
- DSC Unit-4Document30 pagesDSC Unit-4Bandi SirishaNo ratings yet
- COMP 122 Chapter 3graphDocument51 pagesCOMP 122 Chapter 3graphWinny MuusiNo ratings yet
- Graphs Are A Generalization of Trees. Like Trees, Graphs Have Nodes and Edges. (The Nodes Are SometimesDocument18 pagesGraphs Are A Generalization of Trees. Like Trees, Graphs Have Nodes and Edges. (The Nodes Are SometimesSushma BorkarNo ratings yet
- Appendix-Glossary of Graph TheoryDocument16 pagesAppendix-Glossary of Graph TheorymarsNo ratings yet
- Introduction To Graph TheoryDocument12 pagesIntroduction To Graph TheoryKzy ayanNo ratings yet
- Representation of Graphs: Trivial GraphDocument23 pagesRepresentation of Graphs: Trivial GraphMantri YashodaNo ratings yet
- Graphs: Presented By, M.Sangeetha, Ap/Cse, Kongu Engineering CollegeDocument61 pagesGraphs: Presented By, M.Sangeetha, Ap/Cse, Kongu Engineering CollegesangeethaNo ratings yet
- Adjacency MatrixDocument5 pagesAdjacency MatrixKetan TodiNo ratings yet
- Graph Theory PDFDocument7 pagesGraph Theory PDFAayush BorkarNo ratings yet
- Module 9 - GraphsDocument9 pagesModule 9 - GraphsLoki LegendsNo ratings yet
- Sarthak Tomar53 Unit-4 DAADocument9 pagesSarthak Tomar53 Unit-4 DAAHarsh Vardhan HBTUNo ratings yet
- Guided Notebook in GED102 (Mathematics in The Modern World)Document9 pagesGuided Notebook in GED102 (Mathematics in The Modern World)asdfNo ratings yet
- Graph Theory: V V V e eDocument15 pagesGraph Theory: V V V e eShubham GargNo ratings yet
- Week 5Document5 pagesWeek 5NelsonNo ratings yet
- Kuhn's Algorithm For Finding The Greatest Matching in A Bipartite GraphDocument6 pagesKuhn's Algorithm For Finding The Greatest Matching in A Bipartite GraphRavi GohelNo ratings yet
- Lesson 7Document13 pagesLesson 7C/Cpt GOMEZ Micaela G.No ratings yet
- Lecture 17 - Minimum Spanning Tree PDFDocument16 pagesLecture 17 - Minimum Spanning Tree PDFshubhamgupta007No ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Waves - Worksheet 2Document7 pagesWaves - Worksheet 2Ricardo Johnson0% (2)
- Refraction WorksheetDocument2 pagesRefraction WorksheetRicardo Johnson0% (1)
- UNIT 1.5 and 1.6: Common Image File Formats: BMP, JPG (Photograps)Document5 pagesUNIT 1.5 and 1.6: Common Image File Formats: BMP, JPG (Photograps)Ricardo JohnsonNo ratings yet
- MechanixDocument39 pagesMechanixShikta TopsheNo ratings yet
- Maths Worksheet For Grade 7Document8 pagesMaths Worksheet For Grade 7Ricardo JohnsonNo ratings yet
- FM 23-24 Dragon Medium Antitank/Assault Weapon System M47Document24 pagesFM 23-24 Dragon Medium Antitank/Assault Weapon System M47VincenzoNo ratings yet
- SBI द्वारा सुप्रीम कोर्ट में दाखिल किया गया Compliance AffidavitDocument7 pagesSBI द्वारा सुप्रीम कोर्ट में दाखिल किया गया Compliance Affidavitvrastogi100% (1)
- Fisica Universitaria Sears Zemansky 13aDocument83 pagesFisica Universitaria Sears Zemansky 13aDario Jara100% (1)
- PROMETE OxhydroelectricDocument9 pagesPROMETE OxhydroelectricFrancesco Paolo TuccinardiNo ratings yet
- Oracle Payroll Questionnaire PDFDocument6 pagesOracle Payroll Questionnaire PDFbarber bobNo ratings yet
- 9 26 350070 L RPS 1000Document2 pages9 26 350070 L RPS 1000Fernando BerriosNo ratings yet
- Geotechnical Engineering 8 Braced Cuts: Sit 1 Sit 3Document2 pagesGeotechnical Engineering 8 Braced Cuts: Sit 1 Sit 3Hassan SabiNo ratings yet
- Insulation Resistance Test and Polarization Index TestDocument3 pagesInsulation Resistance Test and Polarization Index TestJoeDabidNo ratings yet
- Reviewer - Module 1: 4. Implement StrategyDocument3 pagesReviewer - Module 1: 4. Implement StrategyErika Mae LegaspiNo ratings yet
- Computer Applications (ICSE) Sample Paper 1Document4 pagesComputer Applications (ICSE) Sample Paper 1Guide For School75% (4)
- Chapter 01 - EMDocument44 pagesChapter 01 - EMRashmi RathnayakaNo ratings yet
- Master of Business Administration: MOS Marketing of ServicesDocument31 pagesMaster of Business Administration: MOS Marketing of ServicesTrần Hoàng TrinhNo ratings yet
- Invoice ScissorsDocument1 pageInvoice ScissorsAlex ClunieNo ratings yet
- All QuestionDocument37 pagesAll QuestionOUSMAN SEIDNo ratings yet
- FOrmat of BAltic QuestionnaireDocument7 pagesFOrmat of BAltic QuestionnaireNingkhanngam RUivahNo ratings yet
- Algebraic Expressions: College AlgebraDocument8 pagesAlgebraic Expressions: College Algebragerwin dagumNo ratings yet
- Cranial Nerves 2016-36782Document51 pagesCranial Nerves 2016-36782Danu Postolache100% (1)
- RHRP8120 D PDFDocument5 pagesRHRP8120 D PDFgameel alabsiNo ratings yet
- Adopted or Used Libretexts For Your Course? We Want To Hear From YouDocument17 pagesAdopted or Used Libretexts For Your Course? We Want To Hear From YouSwamy ManiNo ratings yet
- 2021 Yr11 Task 1 Business Report FINALDocument3 pages2021 Yr11 Task 1 Business Report FINALTaha Kafil-HussainNo ratings yet
- Akanki Front Page IT Skill Lab 2Document49 pagesAkanki Front Page IT Skill Lab 2Shivam ChandraNo ratings yet
- Communicating The Museum 2013 SlideshareDocument38 pagesCommunicating The Museum 2013 SlidesharehewhittyNo ratings yet
- Educational Leadership Management - Exam - July 2017Document1 pageEducational Leadership Management - Exam - July 2017Mazuba MutintaNo ratings yet
- AMACS Accuflow Inlet Feed Devices Web1Document1 pageAMACS Accuflow Inlet Feed Devices Web1SHINo ratings yet
- Bexitrol F Dpi PDFDocument4 pagesBexitrol F Dpi PDFTahia Rahman JuhiNo ratings yet
- Compliance Report - EscanoDocument4 pagesCompliance Report - EscanoCarlo Paul Castro Sana IINo ratings yet
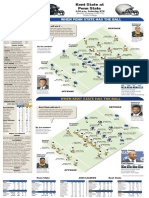
- Kent State at Penn StateDocument1 pageKent State at Penn StatedlevarseNo ratings yet