You might also like
- Project Report On Microcontroller Based Traffic Light Controller.Document22 pagesProject Report On Microcontroller Based Traffic Light Controller.Ayan Samanta80% (10)
- A Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageDocument6 pagesA Higher Level of Efficiency: Five-Level Frequency Converters For Medium VoltageBalaji MbNo ratings yet
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- Grid Interface of Wind PowerDocument34 pagesGrid Interface of Wind PowerM Paul PrasadNo ratings yet
- Variable Frequency Drives in A Power Plant: SynopsisDocument22 pagesVariable Frequency Drives in A Power Plant: SynopsisReuben VargheseNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- The Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodDocument15 pagesThe Reduction of Total Harmonic Distortion For The Multilevel Converter Using Genetic Algorithms Optimization MethodMohammad reza eesazadehNo ratings yet
- Industrial Drives and ControlDocument10 pagesIndustrial Drives and ControlMohit SanandiyaNo ratings yet
- Control of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceDocument8 pagesControl of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceAnand KumarNo ratings yet
- A Review On Ripple Current Reduction Technique With Active Power FilterDocument8 pagesA Review On Ripple Current Reduction Technique With Active Power FilterAneeq AshiqNo ratings yet
- Wind Energy Interface To Grid With Load Compensation by Diode Clamped Multilevel InvertersDocument11 pagesWind Energy Interface To Grid With Load Compensation by Diode Clamped Multilevel InvertersharivarahiNo ratings yet
- (Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link CapacitanceDocument12 pages(Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link Capacitancesk.karimeeeNo ratings yet
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiNo ratings yet
- DC Drives Basic Operation PrinciplesDocument3 pagesDC Drives Basic Operation Principleskadirov31No ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- A New Topology For Unipolar Brushless DC Motor Drive With High Power FactorDocument8 pagesA New Topology For Unipolar Brushless DC Motor Drive With High Power FactorRagunathan NarayananNo ratings yet
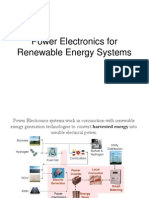
- Power Electronics For Renewable Energy SystemsDocument33 pagesPower Electronics For Renewable Energy SystemssrilakshmisiriNo ratings yet
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocument56 pagesA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNo ratings yet
- Chapter 1Document15 pagesChapter 1webhareggebru06No ratings yet
- Paper 15Document13 pagesPaper 15RakeshconclaveNo ratings yet
- HVDC Unit-IDocument16 pagesHVDC Unit-ISreenivas Reddy BodimallaNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Ijset 2014 201Document7 pagesIjset 2014 201Innovative Research PublicationsNo ratings yet
- Introduction To Electrical DrivesDocument11 pagesIntroduction To Electrical DrivesGaurav SrivastavaNo ratings yet
- Simulation and Control - FullDocument10 pagesSimulation and Control - FullTJPRC PublicationsNo ratings yet
- Variable Frequency DriveDocument4 pagesVariable Frequency Drivearavind_k104No ratings yet
- Bule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesDocument14 pagesBule Hora University Department of Ece Eceg 4222 Power Electronics & Electric DrivesBilisuma DamiteNo ratings yet
- Ac - Variable Frequency Drive SystemsDocument4 pagesAc - Variable Frequency Drive Systemsjyothsna123456No ratings yet
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsNo ratings yet
- Department of Electrical and Computer Engineering: AdvisorDocument19 pagesDepartment of Electrical and Computer Engineering: AdvisorSabir VeNo ratings yet
- Grid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow ManagementDocument6 pagesGrid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow ManagementEditor in ChiefNo ratings yet
- Unit VDocument23 pagesUnit VDhaval PatelNo ratings yet
- Efficiency Optimization Method For Cascaded Two-Stage Boost ConverterDocument11 pagesEfficiency Optimization Method For Cascaded Two-Stage Boost ConverterragulkumarNo ratings yet
- Facts at Your Fingertips: Variable Frequency DrivesDocument1 pageFacts at Your Fingertips: Variable Frequency Drivesagrocel_bhv5591No ratings yet
- Vector Controlled Induction Machines For Stand-Alone Wind Energy ApplicationsDocument8 pagesVector Controlled Induction Machines For Stand-Alone Wind Energy Applicationssatyam swarup dubeyNo ratings yet
- Investigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDocument7 pagesInvestigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDaniel reisNo ratings yet
- Matteini PHD Part1Document15 pagesMatteini PHD Part1Anonymous EnggrUsmNo ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Facts by SVC (Flexible Ac Transmission)Document4 pagesFacts by SVC (Flexible Ac Transmission)scribsunilNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Design and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1Document10 pagesDesign and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1AMANNo ratings yet
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 pagesTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Sri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersDocument12 pagesSri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersdhivyadevinNo ratings yet
- Single Phase To Three Phase SystemDocument57 pagesSingle Phase To Three Phase SystemASK projects100% (1)
- Analysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterDocument10 pagesAnalysis of Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC ConverterMagpie 2023No ratings yet
- 1 PDFDocument8 pages1 PDFB.Kailash Krishna PrasadNo ratings yet
- Study Analysis of Conservation of Energy With VFDDocument9 pagesStudy Analysis of Conservation of Energy With VFDHashfi HamdaniNo ratings yet
- Chopper Controlled DC DrivesDocument1 pageChopper Controlled DC Drives852963No ratings yet
- Applications of MatixDocument2 pagesApplications of MatixSugu SukuNo ratings yet
- MV Industrial VSDDocument7 pagesMV Industrial VSDONILEDA1970No ratings yet
- Closed Loop Speed Control of 3-Phase Induction MotorDocument27 pagesClosed Loop Speed Control of 3-Phase Induction MotorRajesh kumar yadavNo ratings yet
- Avoiding Regeneration On Braking For Induction Motor With A Matrix Converter DriveDocument11 pagesAvoiding Regeneration On Braking For Induction Motor With A Matrix Converter Driveusai_ahmadNo ratings yet
- IntroductionDocument3 pagesIntroductionaziz balochNo ratings yet
- Technical Seminar On VFDDocument17 pagesTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- Speed ControlDocument4 pagesSpeed ControlNguyễn LiêmNo ratings yet
- A Power Electronic Conditioner Using Ultracapacitors To Improve Wind Turbine Power QualityDocument7 pagesA Power Electronic Conditioner Using Ultracapacitors To Improve Wind Turbine Power QualityDavid Cano AlfaroNo ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- AIR-AP2802E-E-K9 AIR-AP2802E-E-K9: Quick SpecsDocument3 pagesAIR-AP2802E-E-K9 AIR-AP2802E-E-K9: Quick Specsnamor namorNo ratings yet
- ARM Based Development SyllabusDocument3 pagesARM Based Development SyllabusMANIKANDANNo ratings yet
- L7581 DataSheet PDFDocument2 pagesL7581 DataSheet PDFRohmad FauziNo ratings yet
- Chapter 33 - 32Document7 pagesChapter 33 - 32Putu TirtaNo ratings yet
- NXP Semiconductors PMBT2907A DatasheetDocument8 pagesNXP Semiconductors PMBT2907A Datasheetgabriel SantosNo ratings yet
- 1 DC Circuits Review WideDocument109 pages1 DC Circuits Review WideMarc RiveraNo ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- VSC Report Version1Document51 pagesVSC Report Version1ankur rathiNo ratings yet
- Guideform Spec EPM 5500PDocument3 pagesGuideform Spec EPM 5500PNeelakandan MasilamaniNo ratings yet
- Cititor Stand Alone Interior Sebury Cartele Proximitate Cod ControllerDocument7 pagesCititor Stand Alone Interior Sebury Cartele Proximitate Cod ControllerAndrei PantaNo ratings yet
- G41M VS3 PDFDocument50 pagesG41M VS3 PDFgoroonNo ratings yet
- MM710 TRMDocument212 pagesMM710 TRMnicormc50% (4)
- A Review On Various Converters Used in D PDFDocument22 pagesA Review On Various Converters Used in D PDFaswardiNo ratings yet
- Fizik Lab ReportDocument5 pagesFizik Lab ReportnajwaNo ratings yet
- VT30 SManualDocument8 pagesVT30 SManualJean-Pierre Desrochers100% (1)
- AO2020 Modbus MapDocument34 pagesAO2020 Modbus MapcesarintiNo ratings yet
- ZbusDocument5 pagesZbusAmbuj SaxenaNo ratings yet
- D788 HitachiSemiconductorDocument6 pagesD788 HitachiSemiconductorBrio Deginta Rama YudaNo ratings yet
- DX DiagDocument13 pagesDX DiagAnimesh BhattaraiNo ratings yet
- Multimeter ReportDocument15 pagesMultimeter Reportapi-244226518No ratings yet
- Quectel M10 DatasheetDocument83 pagesQuectel M10 DatasheetGsm Rana0% (1)
- Av74 0018Document39 pagesAv74 0018Franco PugaNo ratings yet
- A Wideband CMOS Sigma-Delta Modulator With Incremental Data Weighted AveragingDocument7 pagesA Wideband CMOS Sigma-Delta Modulator With Incremental Data Weighted Averagingengrshafiq7715No ratings yet
- Lecture 4: Continuation of SystemverilogDocument17 pagesLecture 4: Continuation of SystemverilogSivasubramanian ManickamNo ratings yet
- Spare Parts Manual For Fresenius 2008H and 2008K Dialysis MachineDocument161 pagesSpare Parts Manual For Fresenius 2008H and 2008K Dialysis MachineEdd N Ros Adlawan60% (5)
- Direct Memory Access: Direct Memory Access (DMA) Is A Process in Which An External Device TakesDocument21 pagesDirect Memory Access: Direct Memory Access (DMA) Is A Process in Which An External Device TakesLeonardo Cavero FarfánNo ratings yet
- 12357789Document80 pages12357789lucasNo ratings yet
- 2017 11 30 PC Express Warehouse Clearance Sale Price List PCX ShawDocument17 pages2017 11 30 PC Express Warehouse Clearance Sale Price List PCX ShawJosephVillanuevaNo ratings yet
- Ece402 Microwave-Engineering Eth 1.10 Ac29Document2 pagesEce402 Microwave-Engineering Eth 1.10 Ac29murthyNo ratings yet