You might also like
- Principles of Electric Methods in Surface and Borehole GeophysicsFrom EverandPrinciples of Electric Methods in Surface and Borehole GeophysicsRating: 3 out of 5 stars3/5 (1)
- Understanding the Bouguer Anomaly: A Gravimetry PuzzleFrom EverandUnderstanding the Bouguer Anomaly: A Gravimetry PuzzleRating: 2 out of 5 stars2/5 (1)
- Time Domain Electromagnetic MethodsDocument16 pagesTime Domain Electromagnetic MethodsAydin Nejati100% (1)
- Electromagnetic TechniquesDocument15 pagesElectromagnetic TechniquesYaparla DeepthiNo ratings yet
- Geophysics Exploration - Chapter 6Document43 pagesGeophysics Exploration - Chapter 6Abraham SileshiNo ratings yet
- TEM1D - ZongeDocument18 pagesTEM1D - ZongeYoqie Ali Taufan100% (1)
- Geophysics GravityDocument36 pagesGeophysics Gravityazfarazwanis100% (1)
- T1. Fundamentals of SeimologyDocument54 pagesT1. Fundamentals of SeimologyAbraham KefelegnNo ratings yet
- New Classification System Proposed for Granitic PegmatitesDocument25 pagesNew Classification System Proposed for Granitic PegmatitesMyself Myself100% (1)
- Introduction to induced polarization surveying techniquesDocument17 pagesIntroduction to induced polarization surveying techniquesrojara2008No ratings yet
- Tidal CorrectionDocument2 pagesTidal CorrectionInne Puspita SariNo ratings yet
- Gravity Method PDFDocument14 pagesGravity Method PDFأبراهيم كريم كاظمNo ratings yet
- A Brief Presentation On Negative Energy Wormholes and Warp DriveDocument16 pagesA Brief Presentation On Negative Energy Wormholes and Warp DriveLaura RamirezNo ratings yet
- Electrical Resistivity Methods 13 PDFDocument108 pagesElectrical Resistivity Methods 13 PDFNamwangala Rashid NatinduNo ratings yet
- What Is Seismic Interpretation? Alistair BrownDocument4 pagesWhat Is Seismic Interpretation? Alistair BrownElisa Maria Araujo GonzalezNo ratings yet
- GEOPHYSICS TWO MARKSDocument9 pagesGEOPHYSICS TWO MARKSArunodhaya NNo ratings yet
- Magnetic Surveying For Buried Metallic ObjectsDocument8 pagesMagnetic Surveying For Buried Metallic ObjectsV100% (4)
- 12 - Chapter 5 PDFDocument67 pages12 - Chapter 5 PDFPranav. ThubeNo ratings yet
- Statics Correction ElevationDocument9 pagesStatics Correction ElevationAndi Mahri100% (1)
- Principles of Applied Geophysics - 1986 BookmatterDocument10 pagesPrinciples of Applied Geophysics - 1986 BookmatterEder Queiroz BarbosaNo ratings yet
- Timeline of GeologyDocument50 pagesTimeline of Geologykapil100% (1)
- Geologi Geophysics QuizDocument19 pagesGeologi Geophysics QuizRonald ChevalierNo ratings yet
- Introduction To Space ScienceDocument14 pagesIntroduction To Space ScienceShivam mishraNo ratings yet
- Understanding Normal MoveoutDocument7 pagesUnderstanding Normal MoveoutabuobidaNo ratings yet
- The Earth's Magnetic Field - Basics PDFDocument15 pagesThe Earth's Magnetic Field - Basics PDFAntonio Jose da CostaNo ratings yet
- Geoelectrical Methods for Subsurface ExplorationDocument14 pagesGeoelectrical Methods for Subsurface ExplorationJasonNo ratings yet
- G Magnetics MethodsDocument35 pagesG Magnetics MethodsAshrafNo ratings yet
- Surface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionDocument6 pagesSurface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionEzzadin BabanNo ratings yet
- The Everlasting StormDocument2 pagesThe Everlasting StormNatalia SkrempouNo ratings yet
- Tomography HumphreysDocument21 pagesTomography HumphreysMohd RezalNo ratings yet
- Geophysical Exploration and InterpretationDocument73 pagesGeophysical Exploration and InterpretationNajeebNo ratings yet
- Applications of Magnetic Methods in Oil and GasDocument4 pagesApplications of Magnetic Methods in Oil and GasShadi Garma100% (1)
- Seismic 101 LectureDocument67 pagesSeismic 101 Lecturerobin2806100% (2)
- Passive SeismicDocument25 pagesPassive SeismicArnaz AyubaNo ratings yet
- An Introduction To Seismology: Chapter-1Document14 pagesAn Introduction To Seismology: Chapter-1Rahul C GorheNo ratings yet
- Reverse-Time Migration Imaging PrinciplesDocument36 pagesReverse-Time Migration Imaging Principlespratk2No ratings yet
- 424a 2016Document5 pages424a 2016IrsyadnurJ.MargiantoNo ratings yet
- Radioactive Minerals of IndiaDocument24 pagesRadioactive Minerals of IndiaNaveenNo ratings yet
- A Plane EM Wave Is Travelling Vertically Downwards in The Earth in The ZDocument3 pagesA Plane EM Wave Is Travelling Vertically Downwards in The Earth in The Zpata sharma100% (1)
- Measuring Soil Water Content With Ground Penetrating Radar - A Review - IMPORTANTE PDFDocument16 pagesMeasuring Soil Water Content With Ground Penetrating Radar - A Review - IMPORTANTE PDFrotero_pujolNo ratings yet
- Da 02 1658a1Document158 pagesDa 02 1658a1Anonymous YZ9Qb3YqwkNo ratings yet
- Geostationary & Polar-Orbiting SatellitesDocument83 pagesGeostationary & Polar-Orbiting SatellitesAngelie LapeNo ratings yet
- IAEA, 1997 - Tecdoc-980Document440 pagesIAEA, 1997 - Tecdoc-980MARVIC ORTUETA MILANNo ratings yet
- Geophysical Inversion ModellingDocument3 pagesGeophysical Inversion ModellingRurry Elsa LorenzaNo ratings yet
- Deep Electromagnetic Exploration (J. R. Wait, K. K. Roy, S. K. Verma, K. Mallick)Document659 pagesDeep Electromagnetic Exploration (J. R. Wait, K. K. Roy, S. K. Verma, K. Mallick)hemen gogoiNo ratings yet
- INTERSTELLARDocument1 pageINTERSTELLARJosephine MaeNo ratings yet
- Seismic Stratigraphy InterpretationsDocument15 pagesSeismic Stratigraphy InterpretationsSabahatFatimaNo ratings yet
- 1 Introduction of GeophysicsDocument7 pages1 Introduction of GeophysicsAl MamunNo ratings yet
- Earth's Young Magnetic FieldDocument3 pagesEarth's Young Magnetic Fieldeustoque2668No ratings yet
- Electrical Resistivity Tomography Using Wenner BDocument7 pagesElectrical Resistivity Tomography Using Wenner BKamel HebbacheNo ratings yet
- Thermionic Energy Conversion SystemDocument15 pagesThermionic Energy Conversion SystemJan BenedictNo ratings yet
- Calytrix Consulting Pty LTD - Uranium Exploration - Safety, Environmental, Social and Regulatory ConsiderationsDocument78 pagesCalytrix Consulting Pty LTD - Uranium Exploration - Safety, Environmental, Social and Regulatory Considerationsj李枂洙No ratings yet
- Big BangDocument93 pagesBig BangreynanNo ratings yet
- Lecture 1 PGE 316Document36 pagesLecture 1 PGE 316suhashNo ratings yet
- Ucl - ac.Uk-See Practical ExerciseDocument29 pagesUcl - ac.Uk-See Practical Exerciseriponkumar100% (1)
- GeophysicsDocument22 pagesGeophysicsMark MaoNo ratings yet
- Ion PropulsionDocument24 pagesIon PropulsionHarish TalluriNo ratings yet
- Remote Sensing: Application of ScienceDocument19 pagesRemote Sensing: Application of ScienceAlia100% (1)
- A Space Elevator For The Far Side of The MoonDocument23 pagesA Space Elevator For The Far Side of The MoonMarshall EubanksNo ratings yet
- Respectfully Submitted,: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageRespectfully Submitted,: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- 20 HELIBORNE MAGNETIC AND TDEM SURVEY, SHINING TREEDocument1 page20 HELIBORNE MAGNETIC AND TDEM SURVEY, SHINING TREEJavedkhanaNo ratings yet
- 13 HELIBORNE MAGNETIC AND TDEM SURVEY SHINING TREE PROPERTY 2011Document1 page13 HELIBORNE MAGNETIC AND TDEM SURVEY SHINING TREE PROPERTY 2011JavedkhanaNo ratings yet
- 21 HELIBORNE MAGNETIC AND TDEM SURVEY RESULTSDocument1 page21 HELIBORNE MAGNETIC AND TDEM SURVEY RESULTSJavedkhanaNo ratings yet
- Figure 6: Near Surface Magmatic Signatur Agmatic Signature Visible On The Residual Magnetic Intensity e Visible On The Residual Magnetic IntensityDocument1 pageFigure 6: Near Surface Magmatic Signatur Agmatic Signature Visible On The Residual Magnetic Intensity e Visible On The Residual Magnetic IntensityJavedkhanaNo ratings yet
- Helimag 17Document1 pageHelimag 17JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- System Tests: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageSystem Tests: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Item Specification: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageItem Specification: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Survey Specifications: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageSurvey Specifications: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Digital Data Compilation: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageDigital Data Compilation: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Cloning ModelDocument2 pagesCloning ModelJavedkhanaNo ratings yet
- GMSYS-3D Release NotesDocument2 pagesGMSYS-3D Release NotesFardy SeptiawanNo ratings yet
- Release NotesDocument1 pageRelease NotesJavedkhanaNo ratings yet
- GMSYS-3D Release NotesDocument2 pagesGMSYS-3D Release NotesFardy SeptiawanNo ratings yet
- HP Z840 Workstation SpecsDocument2 pagesHP Z840 Workstation SpecsJavedkhanaNo ratings yet
- Xyzgms: Builds GM-SYS Starting ModelsDocument4 pagesXyzgms: Builds GM-SYS Starting ModelsMoise SoaresNo ratings yet
- Slope Half SlopeDocument2 pagesSlope Half SlopeJavedkhanaNo ratings yet
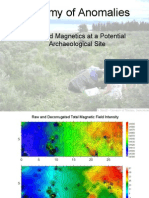
- Archaeological Site Total Field Magnetics Anomaly AnalysisDocument5 pagesArchaeological Site Total Field Magnetics Anomaly AnalysisJavedkhanaNo ratings yet
- Magnetic ExplorationDocument15 pagesMagnetic ExplorationJavedkhanaNo ratings yet
- Electrical Survey DesignDocument9 pagesElectrical Survey DesignJavedkhanaNo ratings yet
- Induced Polarization Survey TechniquesDocument7 pagesInduced Polarization Survey TechniquesJavedkhanaNo ratings yet
- Electrode ConfigurationsDocument5 pagesElectrode ConfigurationsJavedkhanaNo ratings yet