You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Relaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersDocument15 pagesRelaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersAkhilesh Kumar MishraNo ratings yet
- Drawing:: SG01 (20KAF) - 3P001-000 SPG30-20KDocument1 pageDrawing:: SG01 (20KAF) - 3P001-000 SPG30-20KAkhilesh Kumar MishraNo ratings yet
- Personal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Document2 pagesPersonal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Akhilesh Kumar MishraNo ratings yet
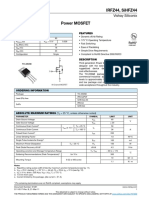
- Irfz44, Sihfz44: Vishay SiliconixDocument9 pagesIrfz44, Sihfz44: Vishay SiliconixAkhilesh Kumar MishraNo ratings yet
- Keep 207Document15 pagesKeep 207Akhilesh Kumar MishraNo ratings yet
- Ee 1002Document108 pagesEe 1002Akhilesh Kumar MishraNo ratings yet
- Dongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Document2 pagesDongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Akhilesh Kumar MishraNo ratings yet
- Objective: .: Electrical Engineering Department Network LabDocument2 pagesObjective: .: Electrical Engineering Department Network LabAkhilesh Kumar MishraNo ratings yet
- Experiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkDocument4 pagesExperiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- 8 Permutation & Combination Part 1 of 4Document5 pages8 Permutation & Combination Part 1 of 4Akhilesh Kumar MishraNo ratings yet
- Academy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Document1 pageAcademy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Akhilesh Kumar MishraNo ratings yet
- Experiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkDocument3 pagesExperiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- Experiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkDocument4 pagesExperiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkAkhilesh Kumar MishraNo ratings yet
- PN DiodeDocument4 pagesPN DiodeAkhilesh Kumar MishraNo ratings yet
- Experiment No: Object:-RequirementsDocument4 pagesExperiment No: Object:-RequirementsAkhilesh Kumar MishraNo ratings yet
- Lecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionDocument17 pagesLecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionAkhilesh Kumar MishraNo ratings yet
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDocument2 pagesExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- Application Form: (Formerly Allahabad Agricultural Institute) (Deemed-to-be-University)Document2 pagesApplication Form: (Formerly Allahabad Agricultural Institute) (Deemed-to-be-University)Akhilesh Kumar MishraNo ratings yet
- Manual Ee ViDocument68 pagesManual Ee ViAkhilesh Kumar MishraNo ratings yet
- Objective:: TheoryDocument5 pagesObjective:: TheoryAkhilesh Kumar MishraNo ratings yet
- Manual Ee ViiiDocument43 pagesManual Ee ViiiAkhilesh Kumar MishraNo ratings yet
- Madhu Vachspati Institute of Engg. & Technology Experiment No.7 ObjectiveDocument2 pagesMadhu Vachspati Institute of Engg. & Technology Experiment No.7 ObjectiveAkhilesh Kumar MishraNo ratings yet
- Transformer Key Point To RememberDocument4 pagesTransformer Key Point To RememberAkhilesh Kumar MishraNo ratings yet
- Spocial Revolution: Why Sachin Tendulkar's Retirement Was Such A Big DealDocument5 pagesSpocial Revolution: Why Sachin Tendulkar's Retirement Was Such A Big DealAkhilesh Kumar MishraNo ratings yet
- United College of Engineering & Research, Allahabad Department of EN/EEDocument5 pagesUnited College of Engineering & Research, Allahabad Department of EN/EEAkhilesh Kumar MishraNo ratings yet
- BasepaperDocument7 pagesBasepaperAkhilesh Kumar MishraNo ratings yet
- DC Machines: AKHILESH KUMAR MISHRA Department of Electrical Engg. (UCER)Document52 pagesDC Machines: AKHILESH KUMAR MISHRA Department of Electrical Engg. (UCER)Akhilesh Kumar MishraNo ratings yet
- Manual Ee IVDocument56 pagesManual Ee IVAkhilesh Kumar MishraNo ratings yet
- Unit-1 2Document20 pagesUnit-1 2Akhilesh Kumar MishraNo ratings yet