You might also like
- Bomba VE VRZ EE14E-11162 VRZ Service ManualDocument117 pagesBomba VE VRZ EE14E-11162 VRZ Service ManualVictor Oliveira92% (25)
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocument635 pagesA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedNo ratings yet
- How To Adjust Parameter LBMC GUI User Manual V1.2Document3 pagesHow To Adjust Parameter LBMC GUI User Manual V1.2captainNo ratings yet
- Parts & Service Manual - Tt4-8 Isuzu 4jb1 and 4jg1 DieselDocument85 pagesParts & Service Manual - Tt4-8 Isuzu 4jb1 and 4jg1 DieselJonathan100% (3)
- SEKO - Blowers Training - 2019Document44 pagesSEKO - Blowers Training - 2019Mudassar AliNo ratings yet
- Cmba-4 ManualDocument34 pagesCmba-4 Manualselçuk avcı100% (1)
- Lcd-Sw900 Instructions: 1. Shell's Size and MaterialDocument6 pagesLcd-Sw900 Instructions: 1. Shell's Size and Materialsonda100% (2)
- Installation Guide XB30330Document68 pagesInstallation Guide XB30330almanis0% (1)
- A WC 708 Lite User ManualDocument12 pagesA WC 708 Lite User ManualFernando ZaiaNo ratings yet
- EA2700 ReconfigurationDocument3 pagesEA2700 Reconfigurationdharman_sNo ratings yet
- LCD 24 K 40Document55 pagesLCD 24 K 40Dedi MulyadiNo ratings yet
- Ohmmeter DesignDocument5 pagesOhmmeter DesignNabil IshamNo ratings yet
- General Gps Vehicle Tracker Wetrack2 User ManualDocument20 pagesGeneral Gps Vehicle Tracker Wetrack2 User ManualDanang Irawan0% (1)
- MP4012Document17 pagesMP4012Ba RownaNo ratings yet
- Votol Controler 1Document3 pagesVotol Controler 1Thanh Son NguyenNo ratings yet
- DS-016 Pixhawk Autopilot V6u StandardDocument12 pagesDS-016 Pixhawk Autopilot V6u Standardali almorsedNo ratings yet
- 4256-0026 - HIP33000 (10K - 80K-0.9) Neutral User Manual 20140228Document46 pages4256-0026 - HIP33000 (10K - 80K-0.9) Neutral User Manual 20140228mauro benagliaNo ratings yet
- BMS 40a 3S - SGTDocument2 pagesBMS 40a 3S - SGTMarcelo Mannett0% (1)
- Training Manual S22B350H S23B350H S24B350H S27B350H enDocument66 pagesTraining Manual S22B350H S23B350H S24B350H S27B350H enPaul ChiriacescuNo ratings yet
- Stepper Motor Driver SpecificationDocument5 pagesStepper Motor Driver SpecificationMimo AbduNo ratings yet
- Msi h81m E33 DatasheetDocument1 pageMsi h81m E33 DatasheetMartín Sayago100% (1)
- Fuente 32ld874ht PDFDocument13 pagesFuente 32ld874ht PDFies837No ratings yet
- Gemini PS-924 ManualDocument7 pagesGemini PS-924 ManualfedeNo ratings yet
- Dap011 DDocument24 pagesDap011 Dsontuyet82No ratings yet
- QL ServiceManualDocument98 pagesQL ServiceManualOscar Arthur KoepkeNo ratings yet
- APT Communications Protocol PDFDocument368 pagesAPT Communications Protocol PDFIsrael Zamarripa RamírezNo ratings yet
- Numark NS7 QSG PDFDocument10 pagesNumark NS7 QSG PDFWainer CervantesNo ratings yet
- Mobile Phone: Service ManualDocument129 pagesMobile Phone: Service Manualnatanael100% (1)
- ES Series Hardware Manual170413Document64 pagesES Series Hardware Manual170413Oscar MontañezNo ratings yet
- Euchner Encoder PDFDocument2 pagesEuchner Encoder PDFTimNo ratings yet
- SiemensDocument181 pagesSiemensapi-974825720% (1)
- Samsung Plasma Pn42a450p1Document76 pagesSamsung Plasma Pn42a450p1videoson100% (3)
- 3Cd Changer DVD Karaoke System: Service ManualDocument56 pages3Cd Changer DVD Karaoke System: Service Manualluis262100% (1)
- LG Eay62609701 Pspi-L103aDocument23 pagesLG Eay62609701 Pspi-L103aIvanilto Martins da Cruz100% (1)
- HK.T.rt2842P639 PF7913A Backlight - Limitation - Switch PF7913Document6 pagesHK.T.rt2842P639 PF7913A Backlight - Limitation - Switch PF7913rammerDankovNo ratings yet
- 08 SM A107 Tshoo 7 PDFDocument20 pages08 SM A107 Tshoo 7 PDFAndrey ChersonNo ratings yet
- ISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasDocument33 pagesISL95836 Datasheet - Dual 3+2 PWM Controller - Intersil RenesasRodrigo BentoNo ratings yet
- Tabela Completa de Fabricantes de Placas PCIDocument304 pagesTabela Completa de Fabricantes de Placas PCIi.Opt100% (1)
- Datasheet - HK cn1016 1227640Document2 pagesDatasheet - HK cn1016 1227640Reinaldo KoslowskiNo ratings yet
- Schematic Diagram: 7-1. Circuit DescriptionsDocument6 pagesSchematic Diagram: 7-1. Circuit Descriptionsivo rodriguesNo ratings yet
- Sony Vaio VPCEH2N1E MBX-247 Schematic Diagram Quanta HK1Document39 pagesSony Vaio VPCEH2N1E MBX-247 Schematic Diagram Quanta HK1SRG InfoTechNo ratings yet
- Bitzer 4CES-6YDocument2 pagesBitzer 4CES-6YIchsan DKNo ratings yet
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajNo ratings yet
- Analizer EU1KY Var1.2Document13 pagesAnalizer EU1KY Var1.2Augustin SerbanNo ratings yet
- LCD Repair)Document57 pagesLCD Repair)Nurul Azurin Syukri AdnanNo ratings yet
- Testing Flybacks and Yokes With The RINGER TestDocument4 pagesTesting Flybacks and Yokes With The RINGER TestS a y oNo ratings yet
- Eee PC 1225b Service Manual PDFDocument2 pagesEee PC 1225b Service Manual PDFaldi 88No ratings yet
- Icom 718 Mars ModDocument1 pageIcom 718 Mars Modojessen85No ratings yet
- Boot Menu Reference ListDocument5 pagesBoot Menu Reference ListRusselguide ElectronicsNo ratings yet
- 4axis USBCNC Manual tb60Document31 pages4axis USBCNC Manual tb60jeju233No ratings yet
- For Safe Operation: Description of Error DetectedDocument1 pageFor Safe Operation: Description of Error DetectedAmjad HossenNo ratings yet
- Changzhou Wantai Electrical Appliance Co., LTD: User Guide For 3 Axis TB6560 Driver BoardDocument9 pagesChangzhou Wantai Electrical Appliance Co., LTD: User Guide For 3 Axis TB6560 Driver Boardjulio cesar rosales mendezNo ratings yet
- Changzhou Wantai Electrical Appliance Co., LTD: Product FeaturesDocument10 pagesChangzhou Wantai Electrical Appliance Co., LTD: Product FeaturesMarcos AndréNo ratings yet
- HY-TB3DV-N 3 Axis Driver Board ManualDocument10 pagesHY-TB3DV-N 3 Axis Driver Board Manualafricano333No ratings yet
- HY-TB3DV-M 3axis Driver PDFDocument10 pagesHY-TB3DV-M 3axis Driver PDFjoelgcrNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument10 pages3 Axis TB6560 CNC Driver Board Users ManualSibiagny Villegas ArroyoNo ratings yet
- HY-TB4DV-N 4 Axis Driver Board ManualDocument11 pagesHY-TB4DV-N 4 Axis Driver Board Manualafricano333No ratings yet
- TB6560 Mach3 CNC Stepper Motor Controller Operation InstructionDocument19 pagesTB6560 Mach3 CNC Stepper Motor Controller Operation InstructionCornel BordeiNo ratings yet
- TB6560 3axis DriverDocument11 pagesTB6560 3axis DriverPHQ1910No ratings yet
- TB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionDocument18 pagesTB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionAdelNo ratings yet
- Motor Driver Board Tb6560-5axisDocument14 pagesMotor Driver Board Tb6560-5axisAli Asghar MuzzaffarNo ratings yet
- HY-TB4DV-M 4axis DriverDocument14 pagesHY-TB4DV-M 4axis DriverJeferson SalazarNo ratings yet
- Mechatronics: 3 and 4 Axis Micro Stepper Motor Driver DatasheetDocument12 pagesMechatronics: 3 and 4 Axis Micro Stepper Motor Driver Datasheetedgar zambranoNo ratings yet
- HY-JK02-M 5-Axis Interface Board ManualDocument11 pagesHY-JK02-M 5-Axis Interface Board ManualMarcos AndréNo ratings yet
- User Manual 5 Axis Breakout BoardDocument10 pagesUser Manual 5 Axis Breakout BoardDavid FernandezNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- RS-422 Splitter PDFDocument1 pageRS-422 Splitter PDFNisar AhmedNo ratings yet
- O359h MilDocument90 pagesO359h MilNisar AhmedNo ratings yet
- Em-Xx IngDocument1 pageEm-Xx IngNisar AhmedNo ratings yet
- Rs-422 Splitter Circuit DiagramDocument1 pageRs-422 Splitter Circuit DiagramNisar AhmedNo ratings yet
- Thermal Overload RelaysDocument6 pagesThermal Overload RelaysNisar AhmedNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- Em-Xx IngDocument1 pageEm-Xx IngNisar AhmedNo ratings yet
- Standard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesDocument9 pagesStandard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesNisar AhmedNo ratings yet
- Dav-Xxx IngDocument1 pageDav-Xxx IngNisar AhmedNo ratings yet
- Ug-26 Skad-Kad 04Document1 pageUg-26 Skad-Kad 04Nisar AhmedNo ratings yet
- GK-XX IngDocument1 pageGK-XX IngNisar AhmedNo ratings yet
- Irt WP12 230 PDFDocument2 pagesIrt WP12 230 PDFNisar AhmedNo ratings yet
- HV350 CatalogDocument5 pagesHV350 CatalogNisar AhmedNo ratings yet
- P2796RLW IP55 Rugged ServerDocument3 pagesP2796RLW IP55 Rugged ServerNisar AhmedNo ratings yet
- 2 - Cables and TablesDocument51 pages2 - Cables and Tablesnewton20100% (5)
- Temperature and Humidity SensorDocument1 pageTemperature and Humidity SensorNisar AhmedNo ratings yet
- RS-422 and RS-485 Application Note: International HeadquartersDocument22 pagesRS-422 and RS-485 Application Note: International HeadquartersNisar AhmedNo ratings yet
- DS8922 NationalSemiconductor Elenota - PLDocument14 pagesDS8922 NationalSemiconductor Elenota - PLNisar AhmedNo ratings yet
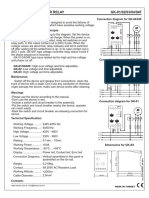
- Voltage and Phase RelayDocument1 pageVoltage and Phase RelayNisar AhmedNo ratings yet
- Model 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleDocument2 pagesModel 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleNisar AhmedNo ratings yet
- Eevblog Electronics Community Forum: SangseuDocument1 pageEevblog Electronics Community Forum: SangseuStefan CorneaNo ratings yet
- How To Check The Quality of Miniature Circuit Breaker (MCB)Document6 pagesHow To Check The Quality of Miniature Circuit Breaker (MCB)lily chanNo ratings yet
- 12 KV 25 Ka VCB - Rev2Document25 pages12 KV 25 Ka VCB - Rev2Mochamad TaufikNo ratings yet
- Linearlight Power Flex Lm10pDocument4 pagesLinearlight Power Flex Lm10pFandy Aditya WiranaNo ratings yet
- 001 - Application Note 1 - 4-20 Ma InterlockDocument2 pages001 - Application Note 1 - 4-20 Ma InterlockJorge VieyraNo ratings yet
- Sankey Clcd2630Document31 pagesSankey Clcd2630KabbalistNo ratings yet
- Deco Surface COBDocument8 pagesDeco Surface COBHarshitBabooNo ratings yet
- TLP521 To TLP521-4Document4 pagesTLP521 To TLP521-4Mohamed AsimNo ratings yet
- CV Brochure - EN - Lores PDFDocument12 pagesCV Brochure - EN - Lores PDFfjaristizabalNo ratings yet
- HF28 Manual Rev E EM Operation ManualDocument144 pagesHF28 Manual Rev E EM Operation ManualsunhuynhNo ratings yet
- Discovering the Magic of Transformable Tables a Guide to Space-Saving FurnitureDocument9 pagesDiscovering the Magic of Transformable Tables a Guide to Space-Saving FurnitureJared JoubertNo ratings yet
- Solar 5.2MVADocument15 pagesSolar 5.2MVAsohaila7No ratings yet
- FCC-B Radio Frequency Interference StatementDocument95 pagesFCC-B Radio Frequency Interference StatementzpockeNo ratings yet
- Ode Solenoid Valve 21wa3z0b130 - 21wa4z0b130Document2 pagesOde Solenoid Valve 21wa3z0b130 - 21wa4z0b130Uno MariconNo ratings yet
- Computer Studies f1 MsDocument5 pagesComputer Studies f1 MsDanielNo ratings yet
- JW21 2008Document34 pagesJW21 2008maximchacaNo ratings yet
- Performance Data: Schedule of Technical Data Genius Cooling Tower Model: GPC 125M Project: Afc Bukit JalilDocument1 pagePerformance Data: Schedule of Technical Data Genius Cooling Tower Model: GPC 125M Project: Afc Bukit JalilJeghiNo ratings yet
- MP7600 Maintenance Manual - 302399FDocument54 pagesMP7600 Maintenance Manual - 302399FRicardo Torres ZamudioNo ratings yet
- Mission Centrifugal Pumps CatalogDocument60 pagesMission Centrifugal Pumps CatalogSebastian Plata100% (1)
- DS DS DS DS: CyclecomputingDocument56 pagesDS DS DS DS: CyclecomputingCharles FortsonNo ratings yet
- 7528 SMDocument626 pages7528 SMjayangelusNo ratings yet
- Testing & Adjusting of CRI System Testing & Adjusting of CRI SystemDocument9 pagesTesting & Adjusting of CRI System Testing & Adjusting of CRI SystemJemmy AnggaraNo ratings yet
- Pentax Me Service ManualDocument20 pagesPentax Me Service Manualopenid_NBsrljQiNo ratings yet
- Danfoss Case StudyDocument3 pagesDanfoss Case StudypaniyaNo ratings yet
- Manejadora Carrier 40RM-10pdDocument80 pagesManejadora Carrier 40RM-10pdrayravel100% (2)
- Bezares Part List 1000 BZDocument19 pagesBezares Part List 1000 BZreincidentesk8No ratings yet