You might also like
- Avr Timer Interrupts in CDocument3 pagesAvr Timer Interrupts in CPolitik Itu KejamNo ratings yet
- Embedded Real TimeDocument60 pagesEmbedded Real Timepraveen_kodgirwarNo ratings yet
- 073 03-Bonus-Semi-Auto-PWM-v009Document13 pages073 03-Bonus-Semi-Auto-PWM-v009pradeepmenariaNo ratings yet
- 8051 TimersDocument20 pages8051 TimersRohitNo ratings yet
- 8051 TimersDocument17 pages8051 Timersfcmandi100% (1)
- MSP430 Timers and PWMDocument13 pagesMSP430 Timers and PWManhhungkenNo ratings yet
- Timer Interrupts: Here Arduino Due Forum PostDocument7 pagesTimer Interrupts: Here Arduino Due Forum PostAlbert DeluqueNo ratings yet
- Timers in 8051 - NotesDocument13 pagesTimers in 8051 - NotesPeaceNo ratings yet
- Engine RPM Measurement Using Timer 1 (Embedded C Programming and The Atmel Avr)Document2 pagesEngine RPM Measurement Using Timer 1 (Embedded C Programming and The Atmel Avr)dinamik2t100% (1)
- PID Position Control Dspic 30f2020Document4 pagesPID Position Control Dspic 30f2020FREEDOMHOUSE100% (3)
- 1 Controlservice: Pseudo-Code For The Controlservice ModuleDocument2 pages1 Controlservice: Pseudo-Code For The Controlservice Moduleapi-360044869No ratings yet
- Lab0 CDocument5 pagesLab0 CJorge Cruz Mancilla100% (1)
- PIDDocument4 pagesPIDIgnacioMartíNo ratings yet
- Code TextDocument2 pagesCode Textjitendra jhaNo ratings yet
- 7b 8051 InterruptsDocument36 pages7b 8051 InterruptsSahilYadavNo ratings yet
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77No ratings yet
- Ir Pulse Generator PseudocodeDocument3 pagesIr Pulse Generator Pseudocodeapi-531773521No ratings yet
- H 1Document7 pagesH 1nilton_9365611No ratings yet
- TimersDocument22 pagesTimersghulam mustafaNo ratings yet
- Lab ManualDocument101 pagesLab ManualSRINITHI P EEE KIOTNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Document6 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Tomás BurónNo ratings yet
- CSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Document17 pagesCSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Santosh Kumar GowdaNo ratings yet
- Unit 5-Typed NotesDocument34 pagesUnit 5-Typed NotesAparna durairajNo ratings yet
- LPC1769 Interrupt ProgramDocument9 pagesLPC1769 Interrupt Programprathap100% (1)
- BAseDocument5 pagesBAseJhon PerezNo ratings yet
- Chap10 13 tmr2 PWMDocument38 pagesChap10 13 tmr2 PWMThanh LeNo ratings yet
- Design With Microprocessors: Year 3 CS Academic Year 2018/2019 1 Semester Lecturer: Radu D ĂnescuDocument23 pagesDesign With Microprocessors: Year 3 CS Academic Year 2018/2019 1 Semester Lecturer: Radu D ĂnescuAdrian BorcaNo ratings yet
- PIC TimersDocument16 pagesPIC TimersSmita PatilNo ratings yet
- AVR C Timers PDFDocument20 pagesAVR C Timers PDFAnonymous u5128WZ1KNo ratings yet
- Arduino Timer and InterrupDocument10 pagesArduino Timer and InterrupFabian Monteleone100% (1)
- Interrupts and TimersDocument21 pagesInterrupts and TimersjaypalibmNo ratings yet
- Microcontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NDocument6 pagesMicrocontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NShivaum Heranjal100% (1)
- Millis For ArduinoDocument13 pagesMillis For Arduinogsvijay57100% (1)
- Timer - 0 - Config Config - Mcu: Void VoidDocument2 pagesTimer - 0 - Config Config - Mcu: Void VoidDjony Sedilque NunesNo ratings yet
- Shutter TestDocument2 pagesShutter Testlucca1xNo ratings yet
- Fa20-Bee-150 MP Lab Report - 10Document6 pagesFa20-Bee-150 MP Lab Report - 10Saadat KhanNo ratings yet
- PWM DatasheetDocument6 pagesPWM DatasheetbaruaeeeNo ratings yet
- PWM With Microcontroller 8051 For SCR or Triac Power ControlDocument8 pagesPWM With Microcontroller 8051 For SCR or Triac Power ControlSyedMahinNo ratings yet
- Timers & 8051 Timer ProgrammingDocument10 pagesTimers & 8051 Timer ProgrammingrobomindNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Document8 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Tomás BurónNo ratings yet
- Timer Programing of Atmega32Document8 pagesTimer Programing of Atmega32Stephanie Flores100% (1)
- PIC16f877a TimerDocument9 pagesPIC16f877a Timerjohn moron100% (2)
- Thigk VDKDocument13 pagesThigk VDKLinh NhậtNo ratings yet
- Lecture 12 8051 Timer Programing v2Document22 pagesLecture 12 8051 Timer Programing v2Faisal Bin Abdur Rahman 1912038642No ratings yet
- Timer Serial and InterruptDocument20 pagesTimer Serial and InterruptAyan AcharyaNo ratings yet
- 1 Blink: Normal Timer ModeDocument4 pages1 Blink: Normal Timer ModeranaNo ratings yet
- Delay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KDocument11 pagesDelay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KOthmane Bouzarzar100% (1)
- Programming For MicrocontrollerDocument3 pagesProgramming For MicrocontrollerHimanshu GaurNo ratings yet
- End Sem ExamDocument20 pagesEnd Sem Examdorejis472No ratings yet
- Timer Counter in ARM7 (LPC2148) : Aarav SoniDocument26 pagesTimer Counter in ARM7 (LPC2148) : Aarav SoniMatthew BattleNo ratings yet
- Microprocessor EXPERIMENT-12-Completed Bahria UniversityDocument6 pagesMicroprocessor EXPERIMENT-12-Completed Bahria Universitybusiness 1No ratings yet
- Ard TimersDocument60 pagesArd TimersMarcio Augusto BerenguelNo ratings yet
- Ch09 AVR Timer Programming in Assembly and CDocument43 pagesCh09 AVR Timer Programming in Assembly and CHina Imtiaz100% (3)
- Newbie's Guide To AVR TimersDocument23 pagesNewbie's Guide To AVR TimersNitish Kumar100% (1)
- Basics of Interrupts.: Steps Taken by Processor While Processing An InterruptDocument10 pagesBasics of Interrupts.: Steps Taken by Processor While Processing An InterruptAmy OliverNo ratings yet
- Cycle 3Document9 pagesCycle 3venkat011003No ratings yet
- G14 A03 ReportDocument4 pagesG14 A03 Reportpranay kamal kamalNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- BB-HD3-A3: FeaturesDocument2 pagesBB-HD3-A3: FeaturesHumberto RoddhuerNo ratings yet
- Design Studio: - CAN Bus Protocol - User GuideDocument28 pagesDesign Studio: - CAN Bus Protocol - User GuideHumberto RoddhuerNo ratings yet
- XTR115 XTR116: Features ApplicationsDocument16 pagesXTR115 XTR116: Features ApplicationsHumberto RoddhuerNo ratings yet
- ESP32 Devkit Pinout - 19Document1 pageESP32 Devkit Pinout - 19Humberto Roddhuer100% (1)
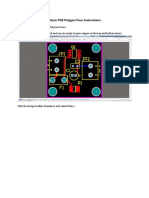
- Altium PCB Polygon Pour InstructionsDocument9 pagesAltium PCB Polygon Pour InstructionsHumberto RoddhuerNo ratings yet
- Library Reference Swordfish For PICsDocument77 pagesLibrary Reference Swordfish For PICsHumberto RoddhuerNo ratings yet
- DELL Optiplex 7050 PDFDocument66 pagesDELL Optiplex 7050 PDFGerardoNo ratings yet
- Anexa 2 Lista Echipamente EA LiestiDocument2 pagesAnexa 2 Lista Echipamente EA LiestiMaria MirceaNo ratings yet
- SBC7 2 v2 X Rev0 0Document1 pageSBC7 2 v2 X Rev0 0waseem_mctNo ratings yet
- Second-Generation Stack Computer ArchitectureDocument178 pagesSecond-Generation Stack Computer Architecturejyothibellary4233No ratings yet
- Panasonic Ag-Dv1000 DV Proline VTRDocument2 pagesPanasonic Ag-Dv1000 DV Proline VTRGerardo FuentesNo ratings yet
- Phantom 2Document14 pagesPhantom 2Nacho RoccaNo ratings yet
- Ec2301 Digital CommunicationDocument19 pagesEc2301 Digital Communicationjeevitha86No ratings yet
- Medicine DispenserDocument10 pagesMedicine DispenserNitin TejNo ratings yet
- Iu Flex (RAN16.0 - 01)Document74 pagesIu Flex (RAN16.0 - 01)hekriNo ratings yet
- Design of A Home Automation System Using Arduino PDFDocument7 pagesDesign of A Home Automation System Using Arduino PDFMitesh NagpalNo ratings yet
- 802 1adDocument36 pages802 1adRaja Bilal LatifNo ratings yet
- Ericsson Rbs Overview and Simple Commands GuidelineDocument22 pagesEricsson Rbs Overview and Simple Commands GuidelineIrfan AmirafiNo ratings yet
- TUIOAS3Document8 pagesTUIOAS3Mammathu AbudhahirNo ratings yet
- Yeastar S Series Administrator Guide enDocument129 pagesYeastar S Series Administrator Guide enVictor Manuel Vicencio ZepedaNo ratings yet
- Solaris 10 How To Find Individual SAN PathsDocument4 pagesSolaris 10 How To Find Individual SAN Pathsimranpathan22No ratings yet
- Major Components of Teradata ArchitectureDocument51 pagesMajor Components of Teradata Architectureinfa4adiNo ratings yet
- Sbo42sp5 Bip Java DG en PDFDocument340 pagesSbo42sp5 Bip Java DG en PDFvadivel.km1527100% (1)
- Pulse ShapingDocument20 pagesPulse ShapinggyanaNo ratings yet
- TM210 Working With Automation StudioDocument42 pagesTM210 Working With Automation StudioDimas Prasetyo Utomo100% (1)
- OCS OLT Manager DatasheetDocument3 pagesOCS OLT Manager DatasheetVinothNo ratings yet
- Juniper Practice QuestionsDocument20 pagesJuniper Practice QuestionsJoseph Jeremy B.No ratings yet
- Quick Image Navigator OIDocument47 pagesQuick Image Navigator OIAfandie Van WhyNo ratings yet
- BER Analysis Power Point PresentationDocument39 pagesBER Analysis Power Point Presentationraymar2kNo ratings yet
- 7.PIC 8259A (Shortened)Document19 pages7.PIC 8259A (Shortened)Akram TahaNo ratings yet
- RVWD Use enDocument32 pagesRVWD Use enAleksandarNo ratings yet
- Operating SystemDocument3 pagesOperating SystemSumathi ArunachalamNo ratings yet
- Uno r3, Mega, Nano Driver FaqDocument13 pagesUno r3, Mega, Nano Driver Faqormar03No ratings yet
- Etd 13 (6211)Document71 pagesEtd 13 (6211)krkamaldevnlm4028No ratings yet
- CP Lab ManualDocument101 pagesCP Lab ManualmiraclesureshNo ratings yet
- Tems Discovery HelpDocument17 pagesTems Discovery Helprf telecomNo ratings yet