You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Lightworker's HandbookDocument58 pagesThe Lightworker's HandbookEvgeniq Marcenkova100% (9)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
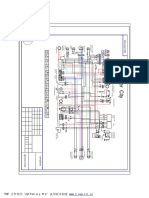
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- The Henna Page "How-To" Mix HennaDocument44 pagesThe Henna Page "How-To" Mix HennaCatherine Cartwright-Jones93% (14)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EASA Exam - Module 04 ElectronicsDocument115 pagesEASA Exam - Module 04 Electronicsbika100% (1)
- Effective MFA For PeopleSoft DataSheet Appsian 2020Document2 pagesEffective MFA For PeopleSoft DataSheet Appsian 2020pnorbertoNo ratings yet
- BrochureDocument20 pagesBrochuresitaNo ratings yet
- EHB - en - File - 9.7.3 Equivalent ASME EN Materials PDFDocument3 pagesEHB - en - File - 9.7.3 Equivalent ASME EN Materials PDFks2000n1No ratings yet
- Biotechnology & Biochemical Engineering: ObjectivesDocument9 pagesBiotechnology & Biochemical Engineering: ObjectivesSusmit NimjeNo ratings yet
- Re - Meteorological Data CostDocument2 pagesRe - Meteorological Data CostJahanzeb KhanNo ratings yet
- LS1.1 - V6 Generalized Architecture of Big Data SystemsDocument8 pagesLS1.1 - V6 Generalized Architecture of Big Data SystemsR KrishNo ratings yet
- 1597752113B.Tech Course StructureDocument2 pages1597752113B.Tech Course StructureMani DhamodharanNo ratings yet
- Reactive Power Management in Renewable Rich Power Grids: A Review of Grid-Codes, Renewable Generators, Support Devices, Control Strategies and Optimization AlgorithmsDocument32 pagesReactive Power Management in Renewable Rich Power Grids: A Review of Grid-Codes, Renewable Generators, Support Devices, Control Strategies and Optimization AlgorithmscuntNo ratings yet
- Rotating Equipment (Driven Items)Document292 pagesRotating Equipment (Driven Items)Faisal DilbaghNo ratings yet
- Improvisational Behaviour 2022Document12 pagesImprovisational Behaviour 2022Hairstyles SANo ratings yet
- DIC Based Stress AnalysisDocument17 pagesDIC Based Stress AnalysisAdarsh PNo ratings yet
- Electrix TweakerDocument1 pageElectrix TweakerUSER58679No ratings yet
- E. Common MineralsDocument19 pagesE. Common MineralsWilma Marquez HabocNo ratings yet
- UNIT 1-PHY 131 Chapter 2 - Introduction To VectorsDocument35 pagesUNIT 1-PHY 131 Chapter 2 - Introduction To VectorscharlieNo ratings yet
- ETICS Fixings / E.W.IDocument54 pagesETICS Fixings / E.W.INarendra Reddy BhumaNo ratings yet
- Phil Precolonial ArtDocument23 pagesPhil Precolonial ArtMonnette Ann Banzuela100% (2)
- A Bank Is A Financial Institution That Serves As A Financial IntermediaryDocument12 pagesA Bank Is A Financial Institution That Serves As A Financial IntermediaryShubhankar SoniNo ratings yet
- Asset Life Cycle ManagementDocument14 pagesAsset Life Cycle ManagementSheeba Mathew100% (1)
- Epas G9 M Q3 W7-W8Document4 pagesEpas G9 M Q3 W7-W8ALLYSSA MAE PELONIANo ratings yet
- GearsDocument246 pagesGearsVinayak AryanNo ratings yet
- Unit 5 Events and TimesDocument10 pagesUnit 5 Events and TimesSteven MadaschiNo ratings yet
- TTSL CatalogDocument3 pagesTTSL CatalogNguyen CuongNo ratings yet
- LanguageDocument8 pagesLanguageAlysson CamposNo ratings yet
- Monitoring of The New Svinesund BridgeDocument18 pagesMonitoring of The New Svinesund BridgeNachoNo ratings yet
- v3PL SAP IntegrationDocument6 pagesv3PL SAP IntegrationShaik Khwaja Nawaz SharifNo ratings yet
- Rayo X Protable XFM ITALRAYDocument18 pagesRayo X Protable XFM ITALRAYaplicacionista.imagenesNo ratings yet