Professional Documents
Culture Documents
Ii - O Método Dos Elementos Finitos
Uploaded by
claudioandrevalverdeOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ii - O Método Dos Elementos Finitos
Uploaded by
claudioandrevalverdeCopyright:
Available Formats
Captulo 2 - O Mtodo dos Elementos Finitos
29
II - O MTODO DOS ELEMENTOS FINITOS
A partir de agora o mtodo de elementos finitos ser apresentado formalmente. Isto
porque, todos os mais importantes assuntos que se relacionam com o mtodo j foram
abordados. A seguir sero descritos, em linhas gerais, a formulao e seus aspectos
particulares, e nos captulos seguintes, os principais elementos com suas formulaes sero
discutidos.
2.1 INTRODUO
O mtodo de elementos finitos uma ferramenta numrico-computacional utilizada para
a soluo aproximada de equaes diferenciais. Sendo assim, verifica-se que o mesmo pode
ser aplicado a quase todas as reas da engenharia. Alm da rea de estruturas (de onde o
mtodo originou-se) pode-se aplic-lo em transferncia de calor, escoamento de fluidos,
lubrificao, campos eltricos e magnticos, e muitos outros. Para proposta deste curso, o
interesse maior ser a anlise de estruturas e meios contnuos.
At quatro dcadas atrs, a soluo de problemas tido hoje como simples, demandava
malabarismos de clculos e aproximaes grosseiras. A simplicidade em resolv-los hoje
creditada potencialidade dos mtodos numricos, tais como elementos finitos, volumes
finitos,
elementos
de
contorno
diferenas
finitas,
juntamente
com
crescente
desenvolvimento dos equipamentos e sistemas computacionais.
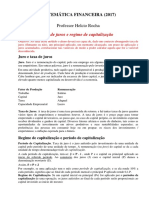
A Figura 2.1-1 mostra uma barra de seo circular no prismtica com um
carregamento axial na sua extremidade, em que, por simplicidade, procedeu-se sua
substituio por uma barra prismtica por partes. Esse tipo de idealizao, configura-se em um
dos conceitos bsicos do mtodo de elementos finitos que a discretizao. Ou seja, a
substituio do sistema original por outro, mais simples na sua forma, por partes. Para esse
exemplo, o deslocamento da extremidade final obtida calculando-se, para cada elemento
prismtico do modelo simplificado, o alongamento e, somando-se a contribuio de cada um e
obtendo-se o deslocamento total na extremidade da barra.
PL
e = A Ee
e
(2.1-1)
T = 1 + 2 +3
(2.1-2)
A discretizao do domnio da estrutura permite descrever de forma mais simplificada o
seu comportamento. Ela pode ser feita subdividindo o domnio em formas diferentes de
29
Captulo 2 - O Mtodo dos Elementos Finitos
30
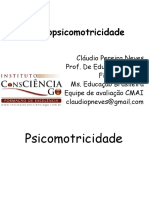
elementos. Isso vai depender, alm do tipo de anlise e da preciso desejada, se o problema
unidimensional (com em trelias ou vigas), bidimensional (elasticidade plana, placas ou cascas)
ou tridimensional. Alguns tipos e formas de elementos so mostrados em Figura 2.1-2.
Figura 2.1-1 - Barra discretizada em elementos prismticos.
De uma forma geral, o mtodo dos elementos finitos consiste em modelar a estrutura
como uma montagem de pequenas partes, as quais so chamadas de elementos, onde a
conexo dessas pequenas partes feita no mais em uma rea ou linha, mais em pontos
discretos os quais chamam-se ns (ver Figura 2.1-3). As cargas distribudas so agora
aplicadas, de forma consistente, nos ns. Ou seja, calcula-se o valor da carga aplicada que ir
atuar em cada de forma a produzir a mesma energia do sistema original. Com essa nova
modelagem analisa-se a estrutura de forma local em cada elemento, somando-se em seguida
a contribuio das partes para restaurar o sistema completo. Como os diversos elementos da
estrutura apenas iteragem nos ns, supe-se que as cargas e deslocamentos atuantes nesses
ns so os responsveis pelo estado de tenso ou deformao do elemento e por conseguinte
da estrutura. Com esse raciocnio, verifica-se que no mais necessita-se saber o
comportamento da estrutura ponto a ponto, como o resultado da soluo analtica de uma
equao diferencial. Basta que os valores das variveis nodais dos elementos sejam
30
Captulo 2 - O Mtodo dos Elementos Finitos
31
conhecidos de alguma forma. O problema reduz-se de um de infinitos graus de liberdade para
um de finitos graus de liberdade. A questo : como relacionar estes valores nodais de
diferentes elementos com o que ocorre dentro dele? E como isso se relaciona com o todo? A
resposta est na aplicao dos mtodos utilizados na seo anterior, s que de forma
localizada e no mais global. E para facilitar a implementao computacional e dar um carter
mais fsico formulao, o ideal seria utilizar os parmetro ai das funes aproximao como
sendo os valores nodais das variveis interpoladas. Isso facilitaria a implementao, pois,
como ser visto mais a frente, necessrio garantir a compatibilidade entre os elementos nos
ns. Para tal necessrio relacionar os parmetros entre os elementos que compartilham um
n. Isso dificulta muito a automao computacional. Com os parmetros sendo os valores
nodais das variveis interpoladas, alm de evitar tal problema, facilita-se o entendimento da
formulao e anlise de seus resultados, pois, as variveis interpoladas so entidades fsicas.
O formato final do mtodo uma equao de equilbrio dada por
[K]{U} = {R},
onde
(2.1-3)
[K] a matriz de rigidez do problema estrutural. Esta matriz representa as propriedades
fsicas discretizadas da estrutura. Ela simtrica e positiva definida, o que facilita
enormemente sua manipulao;
{U }
o vetor que contm os valores nodais dos deslocamentos utilizados como
parmetros;
{R }
o vetor que contm as cargas atuantes em cada n do modelo estrutural
discretizado.
Figura 2.1-2 - Tipos de elementos
31
Captulo 2 - O Mtodo dos Elementos Finitos
32
Figura 2.1-3 - Discretizao de uma estrutura em elementos plano.
Os passos que constituem, em ltima anlise, o prprio mtodo dos elementos finitos
podem ser assim resumidos:
a) Dividir a estrutura ou meio contnuo em elementos finitos;
b) Formular as propriedades de cada elemento. Em anlise estrutural, isto significa
determinar as cargas nodais associadas com todos os estados de deformaes que so
permitidos;
c) Montar os elementos para obter o modelo de elementos finitos da estrutura;
d) Aplicar as cargas conhecidas: foras e momentos nodais em anlise de tenso;
e) Aplicar as condies de contorno da estrutura. Ou seja, restringir impor os valores de
deslocamentos conhecidos em cada n;
f) Resolver o sistema de equaes algbricas derivadas da condio de equilbrio;
g) Em anlise de tenso, calcular as deformaes e tenses nos ns e no interior do
elemento se necessrio;
h) Avaliao dos resultados encontrados.
32
Captulo 2 - O Mtodo dos Elementos Finitos
33
Figura 2.2-1 Configurao inicial e final de um corpo carregado.
2.2 PRINCPIO DA ENERGIA POTENCIAL ESTACIONRIA
Nesta seo ser abordada a metodologia de se encontrar a configurao de um
sistema estrutural, no dependente do tempo, atravs da utilizao do funcional energia
potencial total.
O conceito inicial a ser apresentado diz respeito a um sistema (a estrutura fsica e as
cargas aplicadas a ela) em que, atravs de um conjunto de foras em equilbrio esttico, muda
de uma configurao inicial Co (posies iniciais de todas as partculas ou graus de liberdade
da estrutura) para uma configurao final Cd (posies finais ou deformadas de todas as
partculas ou graus de liberdade da estrutura) como indicado na Figura 2.2-1. Esses sistemas
so chamados de conservativos se o trabalho feito pelas foras internas e externas, cada um,
seja independente do caminho adotado entre a configurao inicial e final (ver Figura 2.2-2).
Figura 2.2-2 - Configurao deformada de um sistema elstico.
33
Captulo 2 - O Mtodo dos Elementos Finitos
34
Considerando um sistema conservativo dado por uma estrutura elstica submetida a um
carregamento quasi-esttico, o trabalho feito pelas cargas externas igual em magnitude
mudana de energia de deformao armazenada no corpo. Da primeira lei da termodinmica,
tem-se para qualquer configurao,
W + Q = E I + EC,
(2.2-1)
onde W o trabalho das cargas externas aplicadas estrutura;
Q a quantidade de calor fornecida ao sistema;
EI a energia interna do sistema;
EC a energia cintica do sistema.
Desprezando-se as transformaes de energia de calor e considerando-se velocidade
do carregamento quase nula, obtm-se a seguinte expresso:
W = EI.
(2.2-2)
Considerando-se a Figura 2.2-2, verifica-se que o trabalho externo da fora dado por
1
1
PD , enquanto a energia interna de deformao acumulada kD2 . Igualando-se os dois
2
2
P
. Para esse caso, que possui apenas um grau de liberdade a ser
k
valores, obtm-se D =
encontrado, suficiente apenas uma equao para obt-lo. No caso de se ter mais do que um
grau de liberdade, esse mtodo j no mais vivel. Se for observado com cuidado, pode-se
escrever que
P=
dEi
= kD
dD
.:
D=
P
k
(2.2-3)
A relao acima que fornece o mesmo resultado que o balano de energia o primeiro
teorema de Castigliano. De outra forma, pode-se chegar ao mesmo resultado atravs do
Princpio da Energia Potencial Estacionria. A energia potencial total
, como antes definida,
o trabalho total realizado para deslocar a estrutura, com todas as foras atuantes, de sua
configurao deformada para a configurao inicial. Em outras palavras, pode-se dizer que o
trabalho realizado por todas as foras atuantes na estrutura quando a mesma deslocada de
sua configurao final para a inicial. Sendo assim, pode-se escrev-la da seguinte forma:
34
Captulo 2 - O Mtodo dos Elementos Finitos
=U+V
35
(2.2-4)
onde U = EI a energia deformao elstica da estrutura, e
V a energia potencial das cargas externas com sinal negativo.
Uma configurao admissvel qualquer configurao que satisfaz a compatibilidade
interna e condies de contorno essenciais (ou cinemticas). A Figura 2.2-3 mostra
configuraes admissveis (A e B) e no admissveis (C e D). Uma configurao admissvel
no necessita satisfazer as condies de contorno naturais.
Figura 2.2-3 - Configuraes admissveis e no admissveis.
Um sistema mecnico conservativo possui uma energia potencial. Ou seja, a energia do
sistema independe da trajetria. A energia potencial tem um princpio que gera a
configurao de equilbrio de um sistema mecnico. Este princpio obtido com a
estacionaridade do funcional energia potencial. O mesmo anunciado abaixo (Cook, 1988).
Princpio da Energia Potencial Estacionria
Entre todas as configuraes admissveis de um sistema conservativo, aquela que
satisfaz as equaes de equilbrio torna a energia potencial estacionria com respeito
a pequenas variaes admissveis de deslocamento.
Este princpio aplicvel independentemente da relao carga versus deformao ser
linear ou no. Se a condio de estacionaridade um mnimo, o equilbrio estvel.
35
Captulo 2 - O Mtodo dos Elementos Finitos
36
Exemplo 2. Aplicar o princpio da energia potencial estacionria estrutura abaixo e calcular
seu deslocamento D.
Figura 2.2-4 - Mola com carregamento na extremidade.
Soluo:
A energia potencial total do sistema dado por
=U+V
(2.2-5)
onde U a energia de deformao armazenada na mola, dada por
1 2
kD
2
U=
(2.2-6)
e V a energia potencial das cargas externas, e representa a energia necessria para fazer retornar a carga
posio inicial, ou seja
V=-PD
(2.2-7)
A Energia Potencial
1
kD 2 P D
2
(2.2-8)
Aplicando princpio da estacionaridade (ver Apndice B),
D = 0 .
D
(2.2-9)
Como a variao sobre o campo deslocamento arbitrria, tem-se como condio de
estacionaridade
36
Captulo 2 - O Mtodo dos Elementos Finitos
37
= 0
D
(2.2-10)
Substituindo-se a energia potencial na equao acima tem-se
kDeq - P = 0
P
Deq = k
(2.2-11)
onde Deq o deslocamento para a configurao de equilbrio.
Pode-se observar que a Equao 2.2-9 o prprio princpio dos trabalhos virtuais. Uma
demonstrao grfica do mtodo visto em Figura 2.2-5.
Figura 2.2-5 - Grfico da variao da energia potencial com o deslocamento.
Para os problemas com vrios graus de liberdade, ou seja, dependente de uma coleo
de deslocamentos {D} = {D1 , D2 ,..., Dn}, o princpio estacionrio ser dado por:
= ( D1 , D2 ,..., Dn)
(2.2-12)
37
Captulo 2 - O Mtodo dos Elementos Finitos
=
i =1
Di = 0
=0
Di
Di
38
i=1, 2, ...., n
(2.2-13)
Exemplo 3. Encontrar os deslocamentos nos pontos 1, 2 e 3 de uma estrutura como indicado
na Figura 2.2-6.
Figura 2.2-6 - Sistema com mltiplas rigidezes.
Soluo:
A energia de deformao elstica total
U =
1
1
1
k1 D 21 + k 2 ( D 2 D1 ) 2 + k 3 ( D 3 D 2 ) 2
2
2
2
(2.2-14)
( D 2 D 1 ) : deslocamento da mola k 2 apenas
A energia potencial das cargas dado por
V = -P1 D1 - P1 D2 - P1 D3
(2.2-15)
Aplicando a condio da Equao 2.2-13, obtm-se
D1 = 0
D2 = 0 .
D3 = 0
(2.2-16)
38
Captulo 2 - O Mtodo dos Elementos Finitos
39
Logo,
k1 D1 - k2 (D2 - D1) - P1 = 0
k2 (D2 - D1) - k3 (D3 - D2) - P2 = 0.
(2.2-17)
k3 (D3 - D2) - P3 = 0
Na forma matricial tem-se
[K]{D} = {R} ,ou seja,
k1 + k2
k2
0
k2
k2 + k3
k3
0 D1 P1
k3 D2 = P2 ,
k3 D3 P3
(2.2-18)
onde [K] , a matriz de rigidez do problema. Pode-se observar que a mesma simtrica. Isso sempre
ocorre para problemas lineares da mecnica estrutural. Cada coluna, representa o conjunto de foras que
aparecem nas molas quando se aplica um deslocamento unitrio no grau de liberdade referente coluna,
mantendo os outros nulos;
{D} o vetor que contm os graus de liberdade de deslocamentos nodais a serem determinados;
{R} o vetor fora do problema que contm as cargas aplicadas em cada n.
Resolvendo o sistema de equaes algbricas, obtm-se os deslocamentos D1 , D2 e D3.
Com a ajuda dos exemplos anteriores, pode-se fazer algumas observaes importantes
de carter geral:
1. Um sistema cuja relao carga versus deslocamentos seja linear possuir uma matriz de
rigidez simtrica; onde Kij = Kji .Isso acontece porque cada par de coeficientes simtricos
fora da diagonal principal, origina-se de um nico termo KijDiDj da expresso da energia
potencial . Logo, K ij =
2
2
= K ji =
;
Di D j
D j Di
2. Se Di um deslocamento nodal (ou rotao nodal), a equao = 0 uma equao de
D i
equilbrio nodal, pois, impe que a somatria das foras na direo do deslocamento Di seja
nula;
3. A indeterminncia esttica no altera o procedimento ou torna o problema mais complicado;
4. A energia potencial da estrutura pode ser escrita na forma
39
Captulo 2 - O Mtodo dos Elementos Finitos
=U+V
onde U =
40
1
{ }T [ ]{ }
2 D K D
V = - {D}T{R}. (2.2-19)
Se U for nulo, ento {D} = {0} ou {D} expressa um movimento de corpo rgido. Se a
estrutura estvel e suportada de tal forma a impedir o movimento de corpo rgido, ento
1
T
U = 2 {D } [ K ]{D } > 0 para qualquer valor de {D} diferente de zero. Quando isto acontece dizse que [K] positiva definida.
A energia potencial pode ser utilizada para a formulao da matriz de rigidez e vetor
carga dos elementos de uma estrutura, o que ser visto em breve. Para finalizar esta seo
ser apresentada a expresso da energia potencial para o caso mais genrico, a partir do qual
pode-se deduzir os casos particulares.
Considerando um corpo elstico linear submetido a um carregamento conservativo,
pode-se expressar a energia potencial de forma genrica da seguinte forma:
( 21 { }T [ E]{ } { }T [ E]{ 0} + { }T {0})d
T
T
T
{u} { F }d {u} {}d { D} { P}
(2.2-20)
onde representa o domnio e o contorno do corpo. As duas ltimas integrais juntamente
com o ltimo termo representam os potenciais das foras de corpo, foras distribudas e foras
concentradas respectivamente. A primeira integral representa a energia de deformao por
unidade de volume, e possui trs termos que so a energia de deformao interna devido s
cargas, uma parcela devido a deformao inicial e uma devido a tenso inicial. Pode-se deduzir
tal termo considerando inicialmente um cubo unitrio, como na Figura 2.2-7, onde atua sobre
ele as tenses e fora de corpo. As tenses que agem sobre as faces do cubo realizam
trabalho quando o mesmo deslocado para a configurao inicial. Para um incremento de
deformao, e desprezando-se termos de ordem superior, esse trabalho dado por
dU0 = x dx +y dy + z dz + xy dxy + yz dyz + zx dzx.
(2.2-21)
40
Captulo 2 - O Mtodo dos Elementos Finitos
41
Figura 2.2-7 - Cubo de tenses em corpo em equilbrio.
Da expresso acima, conclui-se que
U 0
= x , e assim por diante para cada
x
componente. Escrevendo-se todas as derivadas na forma matricial obtm-se
U 0
= { } ou
U 0
= [E ]{ } [E ]{ 0 } + { }
(2.2-22)
As integrais que possuem as foras de corpo {F} e distribudas {} representam a
energia potencial total das cargas aplicadas, ou seja, o trabalho realizado por essas foras
T
quando leva-se o corpo da posio deformada para a posio inicial. O vetor {u} = [u v w]
representa os deslocamentos nas direes X, Y e Z de cada partcula. E por ltimo, tem-se o
produto das cargas nodais externas com o deslocamento no ponto de aplicao, resultando a
energia potencial das mesmas.
Um caso particular do desenvolvimento acima a viga da Figura 2.2-8. A expresso de
sua energia potencial pode ser derivada sabendo-se que
dw
u = z dx
u
d 2w
x = x = z 2 ,
dx
(2.2-23)
41
Captulo 2 - O Mtodo dos Elementos Finitos
42
tem-se
d 2w
1 2
1
1 d 2w
U = 2 E x d = 2 E( z 2 )b dzdx = 2 EI 2 dx .
dx
dx
(2.2-24)
L
1 d 2w
= 2 EI 2 dx wq dx { w}T { F } { }T { M }
dx
0
0
(2.2-25)
Logo,
L
Figura 2.2-8 - Viga com carregamento distribudo e concentrado.
onde os vetores nodais {w}T = [w1 w2 ...]
{}T = [1 2 .....] referem-se aos pontos de
aplicao cargas.
2.3 MTODO VARIACIONAL LOCALIZADO
Nessa seo abordar-se- o que ser a formulao do mtodo dos elementos finitos
propriamente dito. Para isso ser utilizado um exemplo simples de barra com carregamento
axial, como indicado na Figura 2.3-1. Ser abordado primeiro o caso global e depois o
discretizado. O mtodo de Rayleigh-Ritz juntamente com o funcional de energia potencial total
ser utilizado para gerar a configurao de equilbrio.
Figura 2.3-1 - Barra axialmente carregada.
42
Captulo 2 - O Mtodo dos Elementos Finitos
43
Aplicando o mtodo de Rayleigh-Ritz o problema ser resolvido inicialmente de forma
global. Ou seja, interpolao ser feita sobre o campo deslocamento em todo domnio.
Considerando-se a funo aproximao do tipo
n
u( x ) ua = i ai = i a1 + 2 a2 +...+ n an
(2.3-1)
i =1
onde, inicialmente
ua = x1 a1 + x 0 a0 .
(2.3-2)
A energia potencial total do problema dado por
L
1
2
= 2 EA x dx qu dx 0 AuL .
0
0
(2.3-3)
onde
du
x = dx
(2.3-4)
u ua = x1a1 + x 0a0 .
(2.3-5)
Como a soluo deve satisfazer as condies de contorno essenciais,
u( 0 ) = 0
a0 = 0 .:
ua = x1a1 .
(2.3-6)
Substituindo as equaes na energia potencial obtm-se
du
x = dx = a1
(2.3-7)
L
1
2
= 2 EA a1 dx q0 x ( x a1 ) dx 0 AuL
0
0
1
1
= 2 AEL a12 3 q0 L3 a1 0 A ( La1 )
(2.3-8)
Variando o funcional e aplicando a condio de mnimo, tem-se que
1
3
= ( AELa1 q 0 L3 0 AL)a1 = 0
.:
43
Captulo 2 - O Mtodo dos Elementos Finitos
1
( AEL a1 3 q0 L3 0 AL ) = 0
44
a1 =
1 q 0 L2 0
+
.
3 AE
E
(2.3-9)
Com isso,
1 q0 L2 0
u ua = ( 3 AE + E )x .
(2.3-10)
O campo de tenso dada por,
x = E x ,
sendo x =
(2.3-11)
du
dx = a1, temos
x = Ea1
1 q0 L2
x = 3 A + 0 .
(2.3-12)
Ou seja, o campo de tenso constante. Comparando esses resultados com a soluo exata
da Resistncia dos Materiais (ver Figura 2.3-2) verifica-se que esse resultado muito
insatisfatrio. Para melhor-lo, ser usado uma funo aproximao melhor, dada por
ua = x 2a2 + x1a1 + x 0a0 .
(2.3-13)
Aplicando a condio de contorno essencial, e desenvolvendo o funcional obtm-se,
x = 2 x a2 + a1
(2.3-14)
e
L
L
1
2
= 2 EA ( 2 x a2 + a1 ) dx q0 x ( x 2a2 + x a1 ) dx 0 A( L2a2 + La1 )
0
0
(2.3-15)
Para a condio de estacionaridade
a1 +
a 2 = 0
= 0,
= 0.
a1
a 2
a1
a 2
(2.3-16)
O que nos leva a calcular os parmetros com as seguintes equaes:
L3
EAL( La2 + a1 ) 3 q0 0 AL = 0
(2.3-17)
44
Captulo 2 - O Mtodo dos Elementos Finitos
L4
4
EAL ( 3 La2 + a1 ) 4 q0 0 AL2 = 0 .
2
1 q0 L
Logo, a1 =
4 EA
(7q 0 L2 + 12 0 A)
a2 =
.
12 EA
45
(2.3-18)
(2.3-19)
Os campos aproximados de deslocamento e tenso so vistos na Figura 2.3-2. Ou seja,
(7 q0 L2 + 12 0 A) 2 1 q 0 L
ua =
x +
x+ 0 x
12 EA
4 EA
E
(2.3-20)
(7 q0 L2 + 12 0 A)
1 q0 L
x+
+0
6A
4 A
(2.3-21)
x =
Figura 2.3-2 - Comparao dos valores reais e aproximados da barra carregada.
Os resultados encontrados demonstram que o mtodo de Rayleigh-Ritz aproxima tanto
o campo de deslocamentos (e em conseqncia o de tenso) quanto as condies de contorno
naturais. No entanto, a aproximao ser exata se a soluo estiver contida no espao
formado pela funo aproximao. Sendo assim, para uma aproximao exata, devemos usar
um campo de deslocamento cbico. Ou seja,
ua = x 3a3 + x 2a2 + x1a1,
(2.3-22)
45
Captulo 2 - O Mtodo dos Elementos Finitos
q0 L2 0
onde tem-se a1 =
2EA + E , a2 = 0 e
46
q0
a3 = 6EA
.
(2.3-23)
O mtodo clssico de Rayleigh-Ritz apresentado at aqui, gera bons resultados para
problemas simples ou bem comportados cuja representao atravs de uma base de funes
facilmente obtida. No entanto, se o problema torna-se mais complexo, os termos da funo
aproximao tambm devem ser. Isto torna o mtodo limitado, pois, a funo de aproximao
depender fortemente do problema a ser analisado, tornando-o pouco genrico; inclusive para
a imposio das condies de contorno no essenciais. Para contornar tal problema, pode-se
utilizar o mesmo mtodo, s que interpolando o campo aproximado por partes. Para tal, basta
que divida-se o domnio em partes menores (ou elementos) e interpole-se o campo
separadamente dentro de cada domnio. O nico cuidado que deve-se ter o de manter
satisfeito a continuidade (ou compatibilidade) interna entre os limites dos elementos (os ns).
O mesmo problema anterior ser utilizado para a apresentao do mtodo variacional
localizado. Dividindo-se domnio em trs elementos de mesmo tamanho
L
, e interpolando-se
3
um polinmio linear em cada um deles (ver Figura 2.3-3). Observe que se pode interpolar cada
elemento com funes aproximadas diferentes. Para um elemento genrico tem-se que,
ua( e ) = x1a1( e ) + x 0a0( e ) .
(2.3-24)
E em cada elemento,
onde
ua(1) = x a1(1) + a0(1)
para x1 x x2
elemento 1;
ua(2 ) = x a1( 2 ) + a0( 2 )
para x2 x x3
elemento 2;
ua(3 ) = x a1( 3 ) + a0( 3 )
para x3 x x4
elemento 3.
x1 = 0, x2 = L/3, x3 = 2L/3 e x4 = L.
(2.3-25)
(2.3-26)
As deformaes so dadas por:
x(1) = a1(1)
x( 2 ) = a1( 2 )
(2.3-27)
x( 3 ) = a1( 3 )
A energia potencial escrita da seguinte forma,
46
Captulo 2 - O Mtodo dos Elementos Finitos
47
L1
L
= EA ( ) 2 dx ( q x )u dx ( A)u =
x
0
0
L
02
0
x2
x3 1
x4 1
1
= EA ( ) 2 dx + EA ( ) 2 dx + EA ( ) 2 dx
x
x
x
2
2
2
x
x2
x3
1
(2.3-28)
x2
x3
x4
( q x )u dx + ( q x )u dx + ( q x )u dx ( A)u
0
0
0
0
L
x
x2
x3
1
Substituindo-se os deslocamentos e deformaes nas suas respectivas parcelas,
obtm-se
L
2L/ 3
L/ 3 1
1
1
= 2 EA ( a1(1) )2 dx + 2 EA ( a1( 2 ) )2 dx + 2 EA ( a1( 3 ) )2 dx
0
L/ 3
2L/ 3
L
2L/ 3
L/ 3
( 1)
( 1)
(2)
(2)
( q0 x )( xa1 + a0 ) dx + ( q0 x )( xa1 + a0 ) dx + ( q0 x )( xa1( 3 ) + a0( 3 ) ) dx
0
L/ 3
2L/ 3
(0 A )( La13 + a03 )
(2.3-29)
Aplicando-se a compatibilidade interna para tornar o campo aproximado admissvel, conclui-se
que
u(1)( 0 ) = 0 a0(1) = 0
u (1) ( L / 3) = u ( 2 ) ( L / 3)a 0( 2) =
L (1)
(a1 a1(1) )
3
(2.3-30)
Se as relaes de compatibilidade interna forem substitudas no funcional da energia
potencial e, aplicada a condio de estacionaridade, obtm-se os valores de todos os
parmetros ai. O deslocamento seria uma funo linear por partes dos parmetros
independentes (Figura 2.3-3), como indicado abaixo.
ua(1) = x a1(1)
para x1 x x2
L
L
ua(2 ) = ( x 3 )a1( 2 ) + 3 a1(1)
para x2 x x3
2L
L
L
ua(3 ) = ( x 3 )a1( 3 ) + 3 a1( 2 ) + 3 a1(1)
para x3 x x4
(2.3-31)
47
Captulo 2 - O Mtodo dos Elementos Finitos
48
Os valores de tenso so constantes por partes. Veja na Figura 2.3-3 que os valores
centrais de cada trecho se aproxima muito dos valores exatos. Essa uma caracterstica
importante do mtodo dos elementos finitos baseado em deslocamento. Os valores nodais so
bons para deslocamento, varivel interpolada, porm menos preciso para tenso, varivel
derivada. Os melhores valores de tenso esto no interior do elemento. Para obter-se melhores
resultados deve-se aumentar o nmero de elementos.
Figura 2.3-3 - Discretizao de barra axialmente carregada.
No procedimento anterior, os parmetros ai no possuam um significado fsico muito
claro. Tambm, a introduo da condio de compatibilidade interna entre os elementos, bem
como a resoluo do sistema de equaes em ai, gerado pela condio de estacionaridade,
no muito confortvel para se codificar em um programa de computador. Principalmente se o
programa tiver carter genrico com relao aos carregamentos, geometria, condies de
contorno e refino para melhoramento de resultados. Todos esses problemas podem ser
facilmente evitados se a funo aproximao tiver como parmetros desconhecidos os prprios
valores nodais do campo interpolado. Ou seja, se usar como parmetros ai os valores nodais
dos deslocamentos ui. O procedimento para ter-se tal situao resumisse em encontrar-se as
chamadas funes de forma ou funes de interpolao. Este assunto ser abordado na
prxima seo.
2.4 FUNES DE INTERPOLAO
48
Captulo 2 - O Mtodo dos Elementos Finitos
49
Nesta seo, a funo aproximao no elemento ser dependente dos valores nodais
da prpria funo. O procedimento muito simples. Considerando-se ainda o exemplo da
Figura 2.3-3, onde tem-se um elemento genrico com um sistema de coordenadas local s, uma
funo de deslocamento linear ser proposta para interpolar o campo desconhecido.
Pode-se desenvolver as funes de interpolao em relao ao sistema local, que outra
caracterstica do mtodo dos elementos finitos. Ou seja,
u = a1 + a2 s
a1
u = [1 s]
a2
ou, na forma matricial
(2.4-1)
Para satisfazer a condio de compatibilidade interna entre os elementos esse campo
deve atender as seguintes relaes:
u = ui em s = 0 e u = uj em s = L(e),
onde ui e uj so os deslocamentos nodais dos ns i e j respectivamente, e L(e) o
comprimento do elemento e em anlise.
Escrevendo-se essas condies na forma matricial obtm-se:
u i 1 0 a i
=
(e)
u j 1 L a j
ou
{d}=[A]{a}
(2.4-2)
Resolvendo-se a equao matricial acima para o valor de {a}, e substituindo-se na
Equao 1.4.4-1, tem-se
ui
1
u = [1 s][ A] .
u j
{a} = [A]-1 {d} e
(2.4-3)
A matriz das funes forma
[N ] = [1s][A]1 = [1s ]
1
0 L s
=
1 / L 1 / L L
s
L
(2.4-4)
49
Captulo 2 - O Mtodo dos Elementos Finitos
50
Para o exemplo em anlise, todos os elementos tem a mesma funo forma, porm os
(e)
valores so diferentes. Isto porque os valores nodais {d} e o comprimento L
so, em geral,
diferentes para cada um. A compatibilidade entre os elementos assegurada a priori porque os
mesmos compartilham o mesmo grau de liberdade nos pontos nodais. Alm disso, uma forma
matricial conseguida para a formulao.
O que caracteriza o mtodo dos elementos finitos, e o torna poderoso, a sua
generalidade e facilidade de implementao numrico-computacional. O que foi descrito acima,
alm da prpria discretizao, o que mais caracteriza o mtodo dos elementos finitos. Faz-se
uma aplicao local de um dos mtodos de soluo aproximada, tomando-se como parmetros
os valores nodais da varivel interpolada, bem como suas derivadas. As palavras chaves do
mtodo so:
i) discretizao;
ii) interpolao local do campo por partes,, atravs das funes de interpolao;
iii) valores nodais do campo (ou suas derivadas) como parmetros das funes de
forma;
iv) descrio matricial direta;
v) generalidade.
As funes de forma podem ser encontradas para qualquer elemento como descrito
acima, porm, as mesmas exigem requisitos j satisfeitos por um grupo de funes chamadas
Funes de Interpolao de Lagrange e Funes de Interpolao de Hermite. Antes de
descrev-las sero abordados mais algumas idias sobre a interpolao do campo.
A interpolao nada mais que aproximar o valor de uma funo entre valores
conhecidos, utilizando-se uma funo diferente da real. Isso foi feito nos itens anteriores,
utilizando-se como forma de ajustar a curva (clculo dos parmetros), a minimizao de um
funcional. Considere que a expresso diferencial dentro de um funcional, tenha uma ordem
mxima de derivada igual a m. O mtodo de Rayleigh-Ritz, que utilizado para formulao,
exige que a funo de interpolao tenha uma continuidade (compatibilidade essencial) at a
sua derivada de ordem m - 1. Ou seja, para o problema da barra, resolvido na seo anterior, a
maior ordem de derivada no funcional 1, logo exige-se uma continuidade de ordem 0, que a
prpria funo. Em um problema de viga exige-se uma continuidade de grau 1, que a
continuidade da funo e sua primeira derivada. Isso reflete no tipo de funes de interpolao,
pois, em ltima anlise, as funes de interpolao devem garantir essa continuidade entre os
elementos. Com isso, pode-se definir, a princpio, dois tipos de funes de interpolao mais
utilizadas: as funes de Lagrange e as de Hermite.
50
Captulo 2 - O Mtodo dos Elementos Finitos
51
Funes de Interpolao de Lagrange. Esse tipo de funo apenas garante a continuidade
da prpria funo nos pontos nodais. Ou seja, elas devem ser utilizadas quando a maior ordem
das derivadas no funcional for 1. Nessa situao, diz-se ter uma continuidade C0 entre os
elementos. Desta forma, em uma discretizao por elementos C0, as derivadas ,x , ,y , ,z1 de
um campo , exibe um salto quando se passa de um elemento a outra, como pose-se notar na
Figura 2.3-3.
De uma forma geral, uma varivel de campo
com n valores nodais {e}={1
2.....n}T de acordo com a frmula
n
= [ N ]{ e}
onde os
pode ser interpolada sobre um elemento
ou
= Ni i ,
(2.4-5)
i =1
Nis so as funes das coordenadas (normalmente locais). A funo forma Ni define
a distribuio de
do elemento quando ith grau de liberdade nodal i assume um valor unitrio
e todos os outros graus de liberdade i so zeros.
Para o caso unidimensional (ver Figura 2.4-1), as funes forma so dadas pelo
polinmio de Lagrange e so funo do nmero de graus de liberdade a ser interpolada. Cada
grau de liberdade em um n tem associado a ele uma funo de interpolao que so dadas
por
( x1 x)( x2 x)...( xi 1 x)( xi +1 x)...( xn x)
Ni = ( x
xi )( x2 xi )...( xi 1 xi )( xi +1 xi )...( xn xi ) .
1
(2.4-6)
Essas funes possuem as seguintes caractersticas:
1. Todas
as
funes
Ni
so
polinmios
do
mesmo
grau.
funo
interpolada,
consequentemente, tem o mesmo grau das funes forma;
2. Para qualquer funo forma Ni , Ni = 1 quando x = xi e Ni = 0 quando x = xj onde i j;
3. A somatria das funes forma C0 a unidade.
n
Ni = 1.
i =1
(2.4-7)
51
Captulo 2 - O Mtodo dos Elementos Finitos
52
Figura 2.4-1 - Funes de forma de Lagrange unidimensional.
Para o caso bidimensional, onde a varivel
= (x,y) deve ser interpolada dentro de
uma regio retangular, as funes de interpolao so obtidas considerando-se o produto das
funes de Lagrange. Para o caso em que a funo bilinear(ver Figura 2.4-2),
= a1+ a2 x + a3 y + a4 xy,
(2.4-8)
as funes de interpolao so dadas por
(a x)(b y)
4ab
(a + x)(b y)
N2 =
4ab
(a + x)(b + y)
N3 =
4ab
(a x)(b + y)
N4 =
4ab
N1 =
(2.4-9)
Essas funes so mostradas em Figura 2.4-3.
52
Captulo 2 - O Mtodo dos Elementos Finitos
53
Figura 2.4-2 - Funes de interpolao bidimensional.
O elemento associado com a Figura 2.4-2 e Figura 2.4-3 chamado bilinear. Da mesma
forma, tem-se os elementos biquadrticos, bicbicos e etc. Os biquadrados possuem nove ns,
distribudos nos vrtices, meio das arestas e centro do elemento. Os termos que participam da
interpolao podem ser identificados atravs do tringulo de Pascal na Figura 2.4-4. Para uma
determinada ordem, a depender do nmero de termos que contenha a funo de interpolao,
o elemento dito Serendipity ou de Lagrange.
Figura 2.4-3 - Distribuio das funes de interpolao N1, N2, N3, N4
53
Captulo 2 - O Mtodo dos Elementos Finitos
54
Figura 2.4-4 - Coeficientes polinomiais para elementos planos de Lagrange e Serendipity
Quando tem-se mais de uma varivel para interpolar, como o caso, por exemplo, de
elasticidade plana (campo vetorial), procede-se da mesma forma para cada varivel. Ou seja,
u = u(x,y)
ev
= v(x,y)
u = Ni ui
i =1
(2.4-10)
4
v = Nivi
i =1
(2.4-11)
sendo os Ni os mesmos da Equao 2.4-9 para o elemento retangular.
Funes de Interpolao de Hermite. Essa classe de funes muito utilizada em problemas
estruturais que envolvem flexo. Nesse caso, no apenas a continuidade da funo
desejada, mas tambm de suas derivadas at uma ordem a menos da maior ordem que
aparece no funcional. No caso de viga, a maior ordem no funcional dois. Sendo assim, exigese tambm por critrios de convergncia, que se tenha continuidade entre elementos da
primeira derivada, ou seja, da rotao (gerada pela flexo). Elementos desse tipo so
chamados de continuidade C1. Outro caso onde se aplica esse tipo de funo no problema
clssico de placas.
O elemento mais simples de Hermite ocorre em problemas de flexo unidimensional, ou
seja, em problemas clssicos de viga. Para essa situao, o campo a ser interpolado a
deflexo lateral w = w(x). Para o caso da Figura 2.4-5, tem-se a seguinte funo aproximao
54
Captulo 2 - O Mtodo dos Elementos Finitos
55
w = a0 + a1x + a2 x 2 + a3 x 3
ou
[X] = [1 x x2 x 3] e
{a} = [a1 a2 a3 a4]T
w = [ X ]{a}
(2.4-12)
onde
(2.4-13)
Figura 2.4-5 - Funo interpolao de Hermite para vigas.
Para descrever o campo em funo dos deslocamentos e inclinaes (rotaes) nodais,
procede-se da mesma forma que nas funes de Lagrange. Da Figura 2.4-5 tem-se
w = w1
w,x = 1
w = w2 e w,x = 2
para x = 0
(e)
para x = L
(2.4-14)
Resolvendo-se da mesma que para os polinmios de Lagrange, obtm-se na forma matricial,
w1 1
0
1
=
w
2 1
2 0
0 0
0 a1
1 0
0 a2
L L2 L3 a3
1 2 L 3L2 a4
Com isso, sendo {a}
ou
{d} = [A] {a}
(2.4-15)
= [A]-1{d} e utilizando-se a Equao 1.4.4-12, tem-se
55
Captulo 2 - O Mtodo dos Elementos Finitos
w = [N]{d},
onde [N]
56
= [X][A]-1
(2.4-16)
A representao dessas funes pode ser vista logo abaixo na Figura 2.4-6.
Figura 2.4-6 - Funes de interpolao de Hermite para o caso de flexo de viga.
2.5 FORMULAO DO MTODO DOS ELEMENTOS FINITOS A PARTIR DE
RAYLEIGH-RITZ
Ser apresentada a formulao geral do mtodo de elementos finitos baseado em
deslocamentos a partir do princpio de Rayleigh-Ritz. Para tal, utilizar-se- o campo
deslocamento como varivel dependente a ser aproximada. O funcional a ser minimizado ser
a energia potencial total do sistema. O campo deslocamento ser interpolado por partes
atravs de uma funo aproximao admissvel (normalmente polinomial), tendo como
parmetros os graus de liberdade nodais de cada elemento. A expresso geral da energia
potencial para um corpo elstico linear ,
= ( 21 { }T [ E ]{ } { }T[ E ]{ 0} + { }T {0})d {u}T {F}d {u}T {}d {D}T {P}
(2.5-1)
onde
56
Captulo 2 - O Mtodo dos Elementos Finitos
{u} = [u v w]T
o vetor campo deslocamento
{} = [x y z xy yz zx]T
[E]
57
o vetor campo deformao
matriz das propriedades constitutivas do material
{o} = {o}
so os vetores de deformao inicial e tenso inicial respectivamente
{F} = [Fx Fy Fz]T
{} = [x y z]T
o vetor fora de corpo
o vetor fora de superfcie
{ D}
o vetor dos graus de liberdade nodais da estrutura
{P }
cargas nodais aplicadas por agentes externos
, =
domnio e contorno da estrutura respectivamente.
Para problemas mais simples como vigas, elasticidade plana e placas, a expresso
simplifica-se. Isto ser visto nos captulos que sucedem-se.
O campo deslocamento dentro de cada elemento interpolado da seguinte forma,
{u} = [N]{d}
(2.5-2)
onde [N] a matriz das funes de interpolao e {d} o vetor dos graus de liberdade nodais
de um elemento.
O campo deformao encontrado atravs da diferenciao do deslocamento. Com
isso tem-se
{} = [ ]{u} = [ ][N]{d} = [B]{d}
onde [B]
= [][N]
(2.5-3)
a matriz deformaes-deslocamentos, que contm as derivadas das
funes de forma. O operador [] uma matriz que contm operadores diferenciais.
Substituindo-se {u} e {} dentro do funcional de energia obtm-se,
numel
1 numel
= 2 {d}Tn [k ]n{d}n {d}Tn {re}n {D}T {P} ,
n =1
n =1
(2.5-4)
onde a somatria indica a contribuio de todos os elementos para a energia potencial total, e
a matriz de rigidez e vetor carga equivalente de cada elemento so dadas por:
57
Captulo 2 - O Mtodo dos Elementos Finitos
58
[k ] = [ B]T[ E ][ B]d
(2.5-5)
{re} = [ B]T[ E ]{ 0}d [ B]T {0}d + [ N ]T {F}d + [ N ]T {}d
e
(2.5-6)
onde as integrais so realizadas sobre o domnio e o contorno de cada elemento.
Para finalizar, ser obtida as equaes de equilbrio em cada direo dos graus de
liberdade. Antes tem-se que rescrever a expresso de energia de forma mais compacta.
As somatrias na Equao 2.5-4 podem ser escritas de forma ainda mais compacta,
atravs da expanso da matriz de rigidez e do vetor de carga de forma a descrever todo o
sistema. Todo o grau de liberdade em um elemento tambm deve aparecer no vetor de cargas
global {D}. Dessa forma, expandindo-se e sobrepondo-se as contribuies de cada elemento
na matriz de rigidez e no vetor de carga obtm-se
= 21 {D}T[ K]{D} {D}T {R}
(2.5-7)
onde
[ K] =
numel
[k ]n
n =1
{R} = {P} +
numel
{re}n
(2.5-8)
n =1
Essas somatrias indicam uma operao que chama-se montagem da matriz de rigidez
e do vetor carga nodal consistente. O funcional de energia
agora funo dos graus de
liberdade nodais {D}. Aplicando-se o princpio de estacionaridade
= {0}
D
obtm-se
[K]{D}={R}
(2.5-9)
A ltima relao representa a equao de equilbrio do sistema, e deve ser resolvida para os
valores desconhecidos dos graus de liberdade nodais e reaes nos apoios. A manipulao
torna-se muito facilitada porque a matriz de rigidez global [K] simtrica, bandada e positivadefinida (aps aplicarmos as condies de contorno essenciais necessrias). Ver sobre
propriedades das matrizes no Apndice A.
2.6 BREVE HISTRICO DO MTODO DOS ELEMENTOS FINITOS
58
Captulo 2 - O Mtodo dos Elementos Finitos
59
O mtodo de resoluo de problemas estruturais atravs da substituio da estrutura
real por uma menos complexa, iniciou-se no incio deste sculo. No incio da dcada de 40,
McHenry, Hrenikoff e Newmark aplicavam a tcnica da substituio do contnuo por barras
elsticas, cujas propriedades eram escolhidas de forma a que seus deslocamentos nodais
representassem os deslocamentos dos pontos do contnuo. Em 1943, Courant publicou um
trabalho onde usava o princpio da energia potencial estacionria, juntamente com a idia de
interpolao por partes, sobre sub-regies triangulares, para o estudo de problemas de toro
de Saint-Venant. Este trabalho talvez seja o primeiro, com a idia de elementos finitos que
conhecemos
hoje,
porm,
ficou
esquecido
at
que
mais
tarde,
engenheiros,
independentemente, o desenvolveram.
Em 1957 surgiu uma publicao que se tornou um marco para o mtodo de elementos
finitos. Seus autores eram Turner, Clough, Martin & Topp. Nessa mesma poca, Argyris &
Kelsey tambm publicaram trabalho importante. Nesses trabalhos, uniu-se os conceitos de
anlise e estrutural e do contnuo, e estabeleceu-se as bases para uma descrio matricial do
problema de forma a que pudesse ser implementado de forma sistematizada nos
computadores digitais. Naquela oportunidade, os computadores digitais comeavam a aparecer
com fora na anlise estrutural, principalmente por causa da corrida espacial. De relevada
importncia tambm, o trabalho de Szmelter publicado em 1958, onde o conceito do mtodo
baseado na minimizao de energia, e utilizando-se elementos retangulares, foi apresentado.
O nome Elementos Finitos foi dado em 1960 por Clough. Em 1963, o mtodo ganhou
respeitabilidade por ter sido provada a sua consistncia matemtica. A partir da muitos
pesquisadores comearam a estudar e aplicar o mtodo em vrias reas. Desenvolvendo
novos elementos e aplicando-o em muitos tipos de anlises diferentes.
Para se ter uma idia do desenvolvimento do mtodo, em 1961 dez artigos foram
publicados, 134 em 1966, e 844 em 1971. At 1986 tinham-se cerca de 20.000 publicaes
sobre o mtodo.
O interesse justifica-se, no s por sua generalidade e eficincia, mas, sobretudo, pelo
grande desenvolvimento dos sistemas de computao; permitindo-se a realizao de anlises
inimaginveis duas dcadas atrs.
2.7 APLICAES
A seguir so mostrados algumas aplicaes de sucesso do mtodo de elementos finitos
em diversas reas e tipos de anlises.
59
Captulo 2 - O Mtodo dos Elementos Finitos
60
Figura 2.7-1 - Problema de iterao fluido-estrutura.
60
Captulo 2 - O Mtodo dos Elementos Finitos
61
61
You might also like
- Definição de Grupo PDFDocument12 pagesDefinição de Grupo PDFroddvelosoNo ratings yet
- Tu Te Tornas Eternamente Responsável Por Aquilo Que CativasDocument3 pagesTu Te Tornas Eternamente Responsável Por Aquilo Que CativasMarlene Pereira LimaNo ratings yet
- Aula 06 - Cálculo II - Efomm 2024Document79 pagesAula 06 - Cálculo II - Efomm 2024mateusconthNo ratings yet
- Algebra Linear Simulado 1 e 2Document6 pagesAlgebra Linear Simulado 1 e 2luciovicenteNo ratings yet
- Nomenclatura TipográficaDocument12 pagesNomenclatura TipográficaAlexandre Mota100% (2)
- MA12 Unidade 4Document13 pagesMA12 Unidade 4Pablo Felipe SilvaNo ratings yet
- Apostila de Matemática Financeira 2017Document38 pagesApostila de Matemática Financeira 2017Thiago Ferreira MarquesNo ratings yet
- facuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALDocument34 pagesfacuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALMarlon MaresNo ratings yet
- PsicomotricidadeDocument107 pagesPsicomotricidademercury1946100% (2)
- Controle GeométricoDocument18 pagesControle GeométricoRenan FigueiredoNo ratings yet
- Mat - Ger - 3 - Integrais DuplosDocument3 pagesMat - Ger - 3 - Integrais DuplosMauro AbnnerNo ratings yet
- Indique de Forma Legível A Versão Da Questão AulaDocument4 pagesIndique de Forma Legível A Versão Da Questão AulaMarta RibeiroNo ratings yet
- A Miséria Do MundoDocument4 pagesA Miséria Do Mundosgalva19No ratings yet
- Atividade Discursiva de Matemática InstrumentalDocument4 pagesAtividade Discursiva de Matemática InstrumentalLeandro SilvaNo ratings yet
- Livro Estatística II CarinaDocument51 pagesLivro Estatística II CarinaRoberto Alves0% (1)
- Juros CompostosDocument3 pagesJuros CompostosLucas CauãNo ratings yet
- Leitura de NumerosDocument20 pagesLeitura de NumerosMaria De Fátima FerreiraNo ratings yet
- Estados Múltiplos Do SerDocument10 pagesEstados Múltiplos Do SerAbdullah HakimNo ratings yet
- Capitulo 2 - Regressão Linear SimplesDocument45 pagesCapitulo 2 - Regressão Linear SimplesandreiaNo ratings yet
- Como Trabalhar Com o OpenGLDocument382 pagesComo Trabalhar Com o OpenGLadilson9230No ratings yet
- Aula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)Document54 pagesAula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)camilaeng23No ratings yet
- 1 Ano B ConjuntosDocument4 pages1 Ano B ConjuntosBruno CostaNo ratings yet
- Matemática 8º Ano 4º Corte ProfessorDocument76 pagesMatemática 8º Ano 4º Corte ProfessorLuh Ana100% (1)
- A Polissema 2009Document337 pagesA Polissema 2009Jussara Rauen RibasNo ratings yet
- Guias de Onda e Cavidades RessonantesDocument71 pagesGuias de Onda e Cavidades RessonantesMarvyn IngaNo ratings yet
- Lista de Exercícios de Binômio de NewtonDocument3 pagesLista de Exercícios de Binômio de NewtonDaniel Sombra100% (2)
- Teoria Da Escolha Racional. Fernando MeirelesDocument10 pagesTeoria Da Escolha Racional. Fernando MeirelesRodrigo Ferreira100% (1)
- Guia Definitivo Procentagem para ConcursosDocument17 pagesGuia Definitivo Procentagem para ConcursosTatiana SantosNo ratings yet
- FUNDAMENTOS DE ELETRICIDADE - 7 EDIÇÃO - Volume 1 - Cap - 01 PDFDocument16 pagesFUNDAMENTOS DE ELETRICIDADE - 7 EDIÇÃO - Volume 1 - Cap - 01 PDFCleiton Souza40% (5)
- Brochura de Educação Laboral 9 Classe - I Trimestre 2022-2023Document12 pagesBrochura de Educação Laboral 9 Classe - I Trimestre 2022-2023kienedaniel16No ratings yet