You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Exercise LPGSDocument1 pageExercise LPGSShamima ShishirNo ratings yet
- Boettcher ThermodynamicsDocument78 pagesBoettcher ThermodynamicsCHE.ENG1734No ratings yet
- Chapter 2 Analisis NumericoDocument116 pagesChapter 2 Analisis NumericoStif JaimesNo ratings yet
- SyllabusDocument26 pagesSyllabusmasoodmuhidNo ratings yet
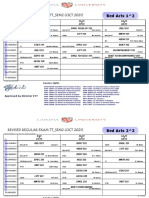
- Revised Regular Exam TT - Sem2 (Oct 2021) : Bed Arts 1 2Document78 pagesRevised Regular Exam TT - Sem2 (Oct 2021) : Bed Arts 1 2kelvinNo ratings yet
- 1 Diagram 1 Shows 2 Shaded Triangles and One Non-Shaded TriangleDocument21 pages1 Diagram 1 Shows 2 Shaded Triangles and One Non-Shaded TriangleCheran KumarNo ratings yet
- Orbital Motors: OMEW Standard and With Low Speed OptionDocument20 pagesOrbital Motors: OMEW Standard and With Low Speed OptionMINH Phạm Mai NhậtNo ratings yet
- Characteristics and Classification of PCMDocument10 pagesCharacteristics and Classification of PCMJinto A JNo ratings yet
- The Herbal Encyclopedia - M: MandrakeDocument3 pagesThe Herbal Encyclopedia - M: MandrakeSyed Ali Akbar BokhariNo ratings yet
- TableDocument10 pagesTableRome GentaNo ratings yet
- Komunitas Dan Potensi Kumbang CarabidaeDocument9 pagesKomunitas Dan Potensi Kumbang CarabidaeAchmad FariedNo ratings yet
- PolystereneDocument3 pagesPolystereneAlbert Julius VlogsNo ratings yet
- Sari Sari Store KSDDocument2 pagesSari Sari Store KSDPatrick Dg100% (1)
- New Approach For CV Risk Management (Prof. DR - Dr. Djanggan Sargowo, SPPD, SPJP (K) )Document56 pagesNew Approach For CV Risk Management (Prof. DR - Dr. Djanggan Sargowo, SPPD, SPJP (K) )Yulia SumarnaNo ratings yet
- BiotechnologyDocument27 pagesBiotechnologySunil PillaiNo ratings yet
- Revised Iesco Book of Financial PowersDocument75 pagesRevised Iesco Book of Financial PowersMuhammad IbrarNo ratings yet
- Netbiter Concept Brochure - WebDocument7 pagesNetbiter Concept Brochure - WebVidian Prakasa AriantoNo ratings yet
- Tree Family & Common NameDocument4 pagesTree Family & Common NameJanine TugononNo ratings yet
- Heat Transfer Introduction: February 2018Document63 pagesHeat Transfer Introduction: February 2018abdelrhmanNo ratings yet
- Recent Developments in Rocket Nozzle Configurations: G. V. R. RaoDocument7 pagesRecent Developments in Rocket Nozzle Configurations: G. V. R. RaoRou MàissàNo ratings yet
- Marketing Management Project: Analysis On Tupperware ProductsDocument5 pagesMarketing Management Project: Analysis On Tupperware ProductsSakthi SaravananNo ratings yet
- Nokia AirScale Base Station Executive Summary enDocument5 pagesNokia AirScale Base Station Executive Summary enrazafarhanNo ratings yet
- CP-Training KantarDocument67 pagesCP-Training KantarNguyễn Viết Cường100% (2)
- Air Intake Systems Product Guide PDFDocument280 pagesAir Intake Systems Product Guide PDFmehralsmenschNo ratings yet
- Ce312 - Chapter 08 - Traffic EngineeringDocument90 pagesCe312 - Chapter 08 - Traffic EngineeringwindellacsonNo ratings yet
- Fixed Biaxial Pedestal - DataDocument3 pagesFixed Biaxial Pedestal - DataEDDYVECENo ratings yet
- Correlation Does Not Imply CausationDocument9 pagesCorrelation Does Not Imply CausationeduliborioNo ratings yet
- A Multi-Loop Low-Dropout FVF Voltage Regulator With Enhanced Load RegulationDocument4 pagesA Multi-Loop Low-Dropout FVF Voltage Regulator With Enhanced Load RegulationAram ShishmanyanNo ratings yet
- Partnering With Indonesia For 40 YearsDocument8 pagesPartnering With Indonesia For 40 YearsasfsndNo ratings yet
- Technical Report OF Student Industrial Working Experience Scheme (S.I.W.E.S) TrainingDocument28 pagesTechnical Report OF Student Industrial Working Experience Scheme (S.I.W.E.S) TrainingEkoh Endurance100% (1)