You might also like
- CAR - South.Africa - February.2012-eMag PDFDocument216 pagesCAR - South.Africa - February.2012-eMag PDFTinyiko Banda100% (3)
- Industrial Revitalisation of Adamjee Jute MillDocument16 pagesIndustrial Revitalisation of Adamjee Jute Millসূর্য্য রবি75% (4)
- Reflection Coeff - osuSubmergedBWDocument15 pagesReflection Coeff - osuSubmergedBWSajal SenguptaNo ratings yet
- Hull Design Considerations For Improved Stability of Fishing Vessels in WavesDocument14 pagesHull Design Considerations For Improved Stability of Fishing Vessels in WavesEd UrquizaNo ratings yet
- Broaching of Small BoatsDocument12 pagesBroaching of Small BoatsNourin Obaid DinaNo ratings yet
- The Influence of Hull Form On The Motions of High Speed Vessels in Head SeasDocument25 pagesThe Influence of Hull Form On The Motions of High Speed Vessels in Head SeassirousNo ratings yet
- Nantes, 4 Cohort 2014: Experimental Ship Hydrodynamics ExamDocument2 pagesNantes, 4 Cohort 2014: Experimental Ship Hydrodynamics Exammicsanche60No ratings yet
- Oe 72 (2013) 453 SRS, CGSDocument17 pagesOe 72 (2013) 453 SRS, CGSsbnrs68No ratings yet
- Sea RoghnessDocument14 pagesSea RoghnessGourav SahaNo ratings yet
- STR 60 2 SoedingDocument16 pagesSTR 60 2 SoedingnaufragatoNo ratings yet
- I07CCC 03hwangDocument8 pagesI07CCC 03hwangcesarNo ratings yet
- Calibrating and Measuring Wakes and Drag Forces of Inland VesselsDocument6 pagesCalibrating and Measuring Wakes and Drag Forces of Inland Vesselsamorim.fatecNo ratings yet
- Hydrodynamic Model For Oil Spill TrajectDocument8 pagesHydrodynamic Model For Oil Spill TrajectZsombor Kisfaludi-BakNo ratings yet
- Narrow Ship Wakes and Wave Drag For Planing HullsDocument5 pagesNarrow Ship Wakes and Wave Drag For Planing HullsMarsel GabrielNo ratings yet
- The Morphodynamic Modelling of Tidal Sand Waves On The ShorefaceDocument18 pagesThe Morphodynamic Modelling of Tidal Sand Waves On The ShorefaceJoão Paulo Mendes FerreiraNo ratings yet
- CFD and CHA Simulation of Underwater Noise Induced by A Marine Propeller in Two-Phase FlowsDocument15 pagesCFD and CHA Simulation of Underwater Noise Induced by A Marine Propeller in Two-Phase FlowsMalvin SetiawanNo ratings yet
- Stability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioDocument31 pagesStability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioLenin ValerioNo ratings yet
- Ship Dynamic SystemDocument11 pagesShip Dynamic Systemdrell54No ratings yet
- 1 s2.0 S0029801818307789 MainDocument13 pages1 s2.0 S0029801818307789 Main杨林No ratings yet
- PEAU7003 Lecture 3 2aug2017Document19 pagesPEAU7003 Lecture 3 2aug2017satyajitchowdhuryNo ratings yet
- Boat Design GuidlinesDocument10 pagesBoat Design GuidlinesSameeraLakmalWickramathilakaNo ratings yet
- Radojcic - On High Speed Mono.2010.SYMPDocument19 pagesRadojcic - On High Speed Mono.2010.SYMPnavalarchmarine100% (1)
- 2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceDocument11 pages2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceGeorge NovacNo ratings yet
- Multihulls Slamming, Upper Deck Wetness and Dimension SelectionDocument4 pagesMultihulls Slamming, Upper Deck Wetness and Dimension SelectiongksahaNo ratings yet
- Numerical Investigation of The Seakeeping Behavior of A CatamaranDocument17 pagesNumerical Investigation of The Seakeeping Behavior of A CatamaranVăn Sương SỳNo ratings yet
- Surfboard HydrodynamicsDocument27 pagesSurfboard Hydrodynamicsedubarbier100% (1)
- Stab 2000Document14 pagesStab 2000KalNo ratings yet
- Module 5-7Document30 pagesModule 5-7Manavee Singh na20b034No ratings yet
- Ijtech Suastika Et Al 2017 BDocument10 pagesIjtech Suastika Et Al 2017 BWina KurniaNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- Calculating Nonlinear Wave Crest Exceedance ProbabilitiesDocument12 pagesCalculating Nonlinear Wave Crest Exceedance Probabilitiestrep8888No ratings yet
- Chen & Li (2015) - Evolution of Breaking Waves On Sloping BeachesDocument15 pagesChen & Li (2015) - Evolution of Breaking Waves On Sloping BeachesRodrigo Campos-CabaNo ratings yet
- Effects of Wave Breaking and Beach Slope On Toe Scour in Front of A Vertical SeawallDocument7 pagesEffects of Wave Breaking and Beach Slope On Toe Scour in Front of A Vertical SeawallIssa DrdrNo ratings yet
- Seakeeping Methods Lecture - Alto UniversityDocument35 pagesSeakeeping Methods Lecture - Alto UniversityajayNo ratings yet
- Investigating The Effect of Wave Parameters On Wave RunupDocument7 pagesInvestigating The Effect of Wave Parameters On Wave RunupDinar IstiyantoNo ratings yet
- Chapter2waveandtides 180204112927Document76 pagesChapter2waveandtides 180204112927muhammad usman HaiderNo ratings yet
- 10 1016@j Coastaleng 2004 08 001Document22 pages10 1016@j Coastaleng 2004 08 001km626212No ratings yet
- Unit 3 and Unit 5 UpdatedDocument86 pagesUnit 3 and Unit 5 UpdatedDebanga BoruahNo ratings yet
- Plynett@tamu - Edu,+3706 15711 1 CEDocument18 pagesPlynett@tamu - Edu,+3706 15711 1 CERC JNo ratings yet
- Assessment of Ship Squat in Shallow Water Using CFDDocument10 pagesAssessment of Ship Squat in Shallow Water Using CFDSushant PandurangiNo ratings yet
- Physics Assessment 1 - Lab Report: Jessica Yam Year 10 Peace MR - SlosbergDocument19 pagesPhysics Assessment 1 - Lab Report: Jessica Yam Year 10 Peace MR - Slosbergapi-36149866550% (2)
- Neves 2006Document31 pagesNeves 2006Janatan ChoiNo ratings yet
- Bower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at SeaDocument7 pagesBower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at Seaandres pientroNo ratings yet
- Breakwater ThesisDocument4 pagesBreakwater Thesiskimberlygomezgrandrapids100% (3)
- Gatin2020 1Document11 pagesGatin2020 1Carlos Eduardo Simoes de AlmeidaNo ratings yet
- OE2014Document12 pagesOE2014Wouter van StraalenNo ratings yet
- Dynamic Pressures On Curved Front Seawall Models Under Random WavesDocument7 pagesDynamic Pressures On Curved Front Seawall Models Under Random WavesJemi JollyNo ratings yet
- Green Sea Loads On General Cargo ShipDocument14 pagesGreen Sea Loads On General Cargo ShipivkenavarchNo ratings yet
- Study of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachDocument10 pagesStudy of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachCarlosNo ratings yet
- Characteristics of Ship Generated Waves and Wash Waves High-Speed ShipsDocument9 pagesCharacteristics of Ship Generated Waves and Wash Waves High-Speed ShipsK SephirothNo ratings yet
- Analysis of An Autonomous Underwater GliderDocument10 pagesAnalysis of An Autonomous Underwater GliderZein Al-Abedeen BarhoumNo ratings yet
- Overtopping of Sea Walls Under Random Waves: Coastal Group, HR Wallingford, Wallingford, OX10 8BA, UKDocument13 pagesOvertopping of Sea Walls Under Random Waves: Coastal Group, HR Wallingford, Wallingford, OX10 8BA, UKShubhangiNo ratings yet
- Bed Changes at Toe of Inclined Seawalls: Article in PressDocument8 pagesBed Changes at Toe of Inclined Seawalls: Article in PressAlexander VovaNo ratings yet
- Dynamic Stability of Ships in WavesDocument9 pagesDynamic Stability of Ships in WavesJUNIOR JAVIER OLIVO FARRERANo ratings yet
- (2002) - Kamikubo Y Et Al., (2002)Document6 pages(2002) - Kamikubo Y Et Al., (2002)Jemi JollyNo ratings yet
- K878 Levadou 2003 Parametric RollDocument14 pagesK878 Levadou 2003 Parametric Rollباسل ديوبNo ratings yet
- The Wave Overtopping Simulator in ActionDocument13 pagesThe Wave Overtopping Simulator in ActionAnna HarveyNo ratings yet
- Diseño de Rompeolas SumergidosDocument15 pagesDiseño de Rompeolas SumergidosMiguel MontoyaNo ratings yet
- Optimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingDocument9 pagesOptimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingTat-Hien LeNo ratings yet
- ASYS Convergence 2014 1Document26 pagesASYS Convergence 2014 1jairamsaripilliNo ratings yet
- On High Speed Monohulls in Shallow Water: March 2010Document20 pagesOn High Speed Monohulls in Shallow Water: March 2010Stalin ZapataNo ratings yet
- $tsu. (:'T ": (: Uu TorDocument23 pages$tsu. (:'T ": (: Uu TorhaujesNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- Design and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004Document11 pagesDesign and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004haujesNo ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- Wave Impact Reduction of Planing BoatsDocument14 pagesWave Impact Reduction of Planing BoatshaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- Estimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReportDocument2 pagesEstimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReporthaujesNo ratings yet
- How To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofDocument4 pagesHow To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofhaujes0% (1)
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- AsdmechanicaldesignDocument5 pagesAsdmechanicaldesignhaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- NASP Origin and Cause, Appraisals On Boat Losses - Davis 2003Document21 pagesNASP Origin and Cause, Appraisals On Boat Losses - Davis 2003haujesNo ratings yet
- Preliminary Jet Size SelectionDocument3 pagesPreliminary Jet Size SelectionhaujesNo ratings yet
- Ultrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZDocument2 pagesUltrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZhaujesNo ratings yet
- Urban Air Mobility: A Paradigm Shift in Transport Systems in Metropolitan AreasDocument1 pageUrban Air Mobility: A Paradigm Shift in Transport Systems in Metropolitan AreasManuel Perez Pandavila100% (1)
- KLM BaggageDocument2 pagesKLM BaggageNavjotNo ratings yet
- ConectoDocument268 pagesConectoVasile DimofteNo ratings yet
- Automatic Railway Gate ControllerDocument10 pagesAutomatic Railway Gate ControllerKoushik MaityNo ratings yet
- Flight Dispatcher Duty Turn Over Sheet CTRL No 168Document9 pagesFlight Dispatcher Duty Turn Over Sheet CTRL No 168Marlon de LeonNo ratings yet
- SCM Assignment 2Document7 pagesSCM Assignment 2RajeshNo ratings yet
- Cosicost-W: Witrac Compatible Adaptive Traffic Control SystemDocument2 pagesCosicost-W: Witrac Compatible Adaptive Traffic Control Systemkommepalli soniyaNo ratings yet
- Siii Dominator IIDocument227 pagesSiii Dominator IIRodrigo HambertoneNo ratings yet
- Installation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Document6 pagesInstallation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Urip S. SetyadjiNo ratings yet
- 01-P-1-007 Pipeline Construction Spec Rev ADocument42 pages01-P-1-007 Pipeline Construction Spec Rev AAdvis100% (2)
- Bill of Lading - BlankDocument1 pageBill of Lading - BlankCraig Shoot100% (1)
- S.6 GEO URBANIZATION Revised 2015Document15 pagesS.6 GEO URBANIZATION Revised 2015Male DaviesNo ratings yet
- Smetka Za Karta PDFDocument1 pageSmetka Za Karta PDFMence PendevskaNo ratings yet
- MAEDA Model MC355C, 355HC Outrigger Reaction Calculation (Static Load)Document10 pagesMAEDA Model MC355C, 355HC Outrigger Reaction Calculation (Static Load)Ethan NguyenNo ratings yet
- FR-LPRE-03 2018-01-01 10: Codigo: FechaDocument49 pagesFR-LPRE-03 2018-01-01 10: Codigo: FechajhohanaNo ratings yet
- Omaya Report FinalDocument75 pagesOmaya Report FinalOmaya TariqNo ratings yet
- Chapter 6 - Sediment Transport and Model ResultsDocument22 pagesChapter 6 - Sediment Transport and Model ResultsaslanhariNo ratings yet
- D2165151-003 Preliminary SGRE ON SG 6.0-170 Site Roads and HardstandsDocument46 pagesD2165151-003 Preliminary SGRE ON SG 6.0-170 Site Roads and HardstandsMarcelo Gonçalves100% (1)
- MR Ade Kurniawan AnsharDocument2 pagesMR Ade Kurniawan Ansharandi anugrahNo ratings yet
- WWII Liberty Ships HistoryDocument136 pagesWWII Liberty Ships HistoryCAP History LibraryNo ratings yet
- RT-650 Provisional Manual - April 2008Document32 pagesRT-650 Provisional Manual - April 2008lula6894No ratings yet
- Timetable Qantas 2Document12 pagesTimetable Qantas 2JonathanNo ratings yet
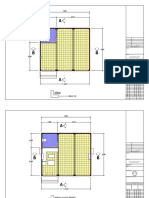
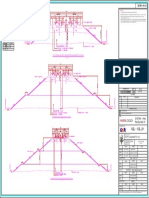
- Denah: Reference Drawing Description DWG NoDocument13 pagesDenah: Reference Drawing Description DWG NoEkaSetiaBudiNo ratings yet
- Northern Watch July 12, 2014Document18 pagesNorthern Watch July 12, 2014Thief River Falls Times & Northern WatchNo ratings yet
- TCS Sheet 1Document1 pageTCS Sheet 1BabulalSahuNo ratings yet
- Parktool 2016 CatalogDocument68 pagesParktool 2016 CatalogBas VolkswagenNo ratings yet
- ICAO WCO Moving Air Cargo enDocument36 pagesICAO WCO Moving Air Cargo enManmohan RawatNo ratings yet
- Design Guidelines - City Center PDFDocument32 pagesDesign Guidelines - City Center PDFarshivachandran50% (4)