You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mono Point Bendix - Renault 19Document98 pagesMono Point Bendix - Renault 19Ivan Alilovic100% (1)
- Celdas BongshinDocument42 pagesCeldas Bongshinalgama-2009No ratings yet
- LKPD 1-2 Report TextDocument9 pagesLKPD 1-2 Report TextKaila NathaniaNo ratings yet
- Gayong-Gayong Sur Integrated School Second Periodic Examination in Science 10Document2 pagesGayong-Gayong Sur Integrated School Second Periodic Examination in Science 10Laira Joy Salvador - ViernesNo ratings yet
- QM Problem Set 2Document11 pagesQM Problem Set 2Neha BhagatNo ratings yet
- E (Z) - Kriging: Exploring The World of Ordinary KrigingDocument58 pagesE (Z) - Kriging: Exploring The World of Ordinary KrigingMilan LLanque CondeNo ratings yet
- An Introduction To Computer Simulation Methods: Harvey Gould, Jan Tobochnik, and Wolfgang Christian July 31, 2005Document8 pagesAn Introduction To Computer Simulation Methods: Harvey Gould, Jan Tobochnik, and Wolfgang Christian July 31, 2005Maria Juliana Ruiz MantillaNo ratings yet
- Organick A Programmers View of The Intel 432 System 1983Document431 pagesOrganick A Programmers View of The Intel 432 System 1983scribd-001No ratings yet
- IEEE 802.15.7 Physical Layer Summary 2011Document5 pagesIEEE 802.15.7 Physical Layer Summary 2011pilacuanNo ratings yet
- Heat treatment of materials - نسخةDocument7 pagesHeat treatment of materials - نسخةHmwDyNo ratings yet
- Classical MechanicsDocument13 pagesClassical Mechanicsdanny222No ratings yet
- Emc Chapter5 Module 5 7Document6 pagesEmc Chapter5 Module 5 7Manjushree PatilNo ratings yet
- Basic Satellite Telecom Theory and Concepts: Arabsat, EscDocument74 pagesBasic Satellite Telecom Theory and Concepts: Arabsat, EscElfatih HashimNo ratings yet
- Physical Geography MCQDocument8 pagesPhysical Geography MCQMRINMOY SAHANo ratings yet
- Tratamento GLPDocument30 pagesTratamento GLPEverton CollingNo ratings yet
- Tm1 Messageloganalysis enDocument8 pagesTm1 Messageloganalysis en'SudarshanRaiNo ratings yet
- A Comparative Study To Analyse The Effect of Training and Development Practices in Public Sector Banks and Private Sector Banks With Special Reference To State Bank of India and Axis Bank LTDDocument10 pagesA Comparative Study To Analyse The Effect of Training and Development Practices in Public Sector Banks and Private Sector Banks With Special Reference To State Bank of India and Axis Bank LTDIAEME PublicationNo ratings yet
- (Download PDF) Effective C An Introduction To Professional C Programming 1St Edition Robert C Seacord Online Ebook All Chapter PDFDocument42 pages(Download PDF) Effective C An Introduction To Professional C Programming 1St Edition Robert C Seacord Online Ebook All Chapter PDFkimberly.reed205100% (12)
- Diagnostic Test in Science 8Document9 pagesDiagnostic Test in Science 8Mylene BalanquitNo ratings yet
- OSIsoft Differentiation 20200406Document2 pagesOSIsoft Differentiation 20200406Venkatesh RamanNo ratings yet
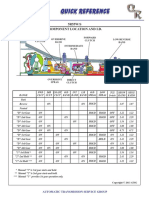
- Quick Reference: 5R55W/S Component Location and I.DDocument7 pagesQuick Reference: 5R55W/S Component Location and I.DAyhan Ümit100% (3)
- J305-AGM TrojanDocument3 pagesJ305-AGM TrojanluzbinbautistaNo ratings yet
- Field RoboticsDocument70 pagesField RoboticsSkanda SwaroopNo ratings yet
- ST UWH I 16Document146 pagesST UWH I 16Lina Ramadhani Anan AsrawiNo ratings yet
- SHARP JX-250 M P Circuits Description SvcMnlsDocument74 pagesSHARP JX-250 M P Circuits Description SvcMnlsDoru RazvanNo ratings yet
- CS109B Quiz Directions Sign The PledgeDocument7 pagesCS109B Quiz Directions Sign The PledgeK. M. Junayed AhmedNo ratings yet
- Sap PP Integration FlowDocument2 pagesSap PP Integration Flowaunhavc0% (1)
- 11 WeirDocument32 pages11 WeirGray Fiore Fullbuster100% (1)
- Flow Diagram Proses Pembuatan Sabun (Kelompok 1) FIXDocument1 pageFlow Diagram Proses Pembuatan Sabun (Kelompok 1) FIXYessi Meridian DiniNo ratings yet
- Technical Specifications For Three Phase Meters PDFDocument6 pagesTechnical Specifications For Three Phase Meters PDFAamir MasoodiNo ratings yet