You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
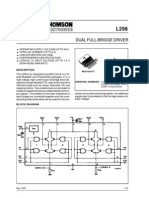
- Dual Full-Bridge Driver: DescriptionDocument12 pagesDual Full-Bridge Driver: DescriptionBastian RamadhanNo ratings yet
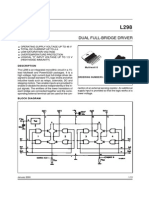
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
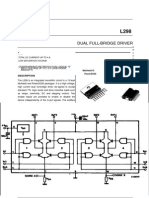
- Data Sheet L298 PDFDocument13 pagesData Sheet L298 PDFbaymax love spideyNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
- Datasheet l298Document27 pagesDatasheet l298TikaaDantSNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- LMD18201 3A, 55V H-Bridge: General DescriptionDocument8 pagesLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoNo ratings yet
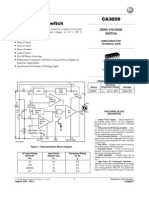
- CA3059Document9 pagesCA3059chinametalNo ratings yet
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocument14 pagesLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNo ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
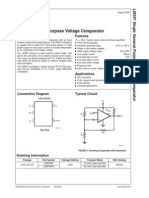
- Voltage Comperator3 LM397Document10 pagesVoltage Comperator3 LM397ΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNo ratings yet
- Open Loop Phase Control Circuit: DescriptionDocument7 pagesOpen Loop Phase Control Circuit: DescriptionMuhammad NajibNo ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- Mach Cong Suat Cau H - Lmd18200Document14 pagesMach Cong Suat Cau H - Lmd18200hieuhuech1No ratings yet
- LM397MF Comparador 6 Pines PDFDocument8 pagesLM397MF Comparador 6 Pines PDFAndres AlegriaNo ratings yet
- Semiconductor Technical Data Zero Voltage SwitchDocument6 pagesSemiconductor Technical Data Zero Voltage SwitchMuresan SanduNo ratings yet
- Zero Crossing Detector and Window DetectorDocument7 pagesZero Crossing Detector and Window DetectorTimoth Dev50% (2)
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- LM18298 Dual Full-Bridge Driver: General Description FeaturesDocument8 pagesLM18298 Dual Full-Bridge Driver: General Description FeaturesMartinNo ratings yet
- LM311Document23 pagesLM311Brzata PticaNo ratings yet
- General Description: Quad Bilateral SwitchDocument23 pagesGeneral Description: Quad Bilateral Switchtotal4321No ratings yet
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocument17 pagesADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiNo ratings yet
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocument18 pagesADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesNo ratings yet
- Siemens Simoreg KDocument12 pagesSiemens Simoreg Knafeesdelta175% (4)
- UC3842 DesignDocument7 pagesUC3842 DesignCui BapNo ratings yet
- M62301SP, FP: Description Pin Configuration (Top View)Document9 pagesM62301SP, FP: Description Pin Configuration (Top View)roozbehxoxNo ratings yet
- Tda 2593Document6 pagesTda 2593Luis Arturo Leiva MonjarasNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- Data Sheet: TDA2653ADocument12 pagesData Sheet: TDA2653Ad_richard_dNo ratings yet
- U 211 B 2Document21 pagesU 211 B 2tavobeckerNo ratings yet
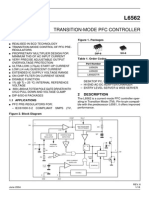
- Transition-Mode PFC Controller: 1 FeaturesDocument17 pagesTransition-Mode PFC Controller: 1 Featuresadriancho66No ratings yet
- Ta 8429 HDocument14 pagesTa 8429 HrikyNo ratings yet
- 1 Tle4216Document15 pages1 Tle4216Villalba XavichoNo ratings yet
- 74 Alvc 164245Document13 pages74 Alvc 164245roozbehxoxNo ratings yet
- Features Descriptio: LTC1645 Dual-Channel Hot Swap Controller/Power SequencerDocument24 pagesFeatures Descriptio: LTC1645 Dual-Channel Hot Swap Controller/Power SequencerRohit SinghNo ratings yet
- Chapter-1 Objective: 1.1 Objective of The ProjectDocument23 pagesChapter-1 Objective: 1.1 Objective of The ProjectPrashanth CooldudeNo ratings yet
- Mini Project Report (CLAP SWITCH)Document22 pagesMini Project Report (CLAP SWITCH)Om Prakash Singh100% (4)
- Data SheetDocument20 pagesData SheetLuis Fernando ChiavegatiNo ratings yet
- BTS5215LDocument14 pagesBTS5215LVanny Is AresNo ratings yet
- Phase-Control IC - Tacho Applications: DescriptionDocument11 pagesPhase-Control IC - Tacho Applications: DescriptionAlex FierăscuNo ratings yet
- LB 1845Document7 pagesLB 1845Nacer MezghicheNo ratings yet
- AP358 DatasheetDocument13 pagesAP358 DatasheetRafael OliveiraNo ratings yet
- UC2842 Philips AN1272 PDFDocument7 pagesUC2842 Philips AN1272 PDFupali01No ratings yet
- LTC1073fa DatasheetDocument16 pagesLTC1073fa DatasheetKushal KshirsagarNo ratings yet