You might also like
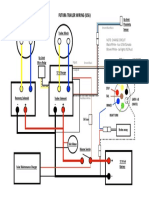
- Futura Trailers - Winch-Box-WiringDocument1 pageFutura Trailers - Winch-Box-Wiringsthollander100% (1)
- Laser Weapon System (LaWS)Document9 pagesLaser Weapon System (LaWS)strumx7100% (1)
- Samyung SRG 3150DN Instruction ManualDocument57 pagesSamyung SRG 3150DN Instruction Manualradam100% (3)
- Lasers in Electronic WarfareDocument3 pagesLasers in Electronic Warfarebring it onNo ratings yet
- PROPULSION E-Motors 300609-014459 PDFDocument59 pagesPROPULSION E-Motors 300609-014459 PDFScott_B4U100% (1)
- SODAR ProfilersDocument57 pagesSODAR ProfilersJose AlNo ratings yet
- Navigating Weather: A Pilot's Guide to Airborne and Datalink Weather RadarFrom EverandNavigating Weather: A Pilot's Guide to Airborne and Datalink Weather RadarNo ratings yet
- SR 500 CsDocument198 pagesSR 500 CsGeovane BarbosaNo ratings yet
- Transmision Power Shift ZF WGDocument9 pagesTransmision Power Shift ZF WGjccla86% (35)
- Military Radar SystemDocument3 pagesMilitary Radar SystemEditor IJTSRDNo ratings yet
- Military RadarDocument20 pagesMilitary Radarrakesh100% (2)
- Unbalanced Wye Connected LoadDocument12 pagesUnbalanced Wye Connected LoadMarj Almirañez100% (2)
- Waveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemDocument6 pagesWaveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemastefanovichNo ratings yet
- ForecastInternational - AIM-9X Sidewinder - F659 - CompleteSample PDFDocument16 pagesForecastInternational - AIM-9X Sidewinder - F659 - CompleteSample PDFScott_B4UNo ratings yet
- DSEE400 Installation InstructionsDocument2 pagesDSEE400 Installation InstructionsYasser JaviNo ratings yet
- Aesa TechpaperDocument17 pagesAesa TechpaperosmanriazNo ratings yet
- Arduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFDocument73 pagesArduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFpermasa100% (1)
- Rheinmetall - 120mm HE DM11 - DMI PDFDocument2 pagesRheinmetall - 120mm HE DM11 - DMI PDFScott_B4U100% (1)
- Radar SpectrumDocument18 pagesRadar SpectrumSry SantosNo ratings yet
- Recent Developments in Russian Radar SystemsDocument7 pagesRecent Developments in Russian Radar SystemsDhimas Afihandarin100% (3)
- Lightweight: MP - M788 TP - M977 TP-T - M789 HedpDocument2 pagesLightweight: MP - M788 TP - M977 TP-T - M789 HedpScott_B4UNo ratings yet
- Which Kinds of Frigates For European Navies ?Document24 pagesWhich Kinds of Frigates For European Navies ?Scott_B4U100% (1)
- Which Kinds of Frigates For European Navies ?Document24 pagesWhich Kinds of Frigates For European Navies ?Scott_B4U100% (1)
- New Microsoft Office Word DocumentDocument5 pagesNew Microsoft Office Word Documentajay100% (1)
- Nano Enabled Coating Makes Aircraft InvisibleDocument29 pagesNano Enabled Coating Makes Aircraft InvisiblePankaj Sattawat50% (4)
- Sar Uav PDFDocument24 pagesSar Uav PDFadityaNo ratings yet
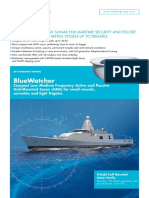
- Thales BlueWatcherDocument2 pagesThales BlueWatcherScott_B4U100% (1)
- OTO Melara 76mm OTOmaticDocument3 pagesOTO Melara 76mm OTOmaticScott_B4U100% (1)
- Poongsan Ammo CatalogueDocument50 pagesPoongsan Ammo CatalogueScott_B4UNo ratings yet
- 2007-05 JFSC Thesis Nfs and Ddg-1000Document186 pages2007-05 JFSC Thesis Nfs and Ddg-1000Scott_B4U100% (1)
- Nov 07 BAMS Article WeberDocument38 pagesNov 07 BAMS Article WeberHarshSharmaNo ratings yet
- Early Advances in Radar Technology For Aircraft Detection: Donald L. ClarkDocument14 pagesEarly Advances in Radar Technology For Aircraft Detection: Donald L. Clarkmehran_eftekharNo ratings yet
- Inflatable Antenna Technology With Preliminary ShuDocument7 pagesInflatable Antenna Technology With Preliminary ShudivyaNo ratings yet
- Ramirez Lee Kwon 2020 Appl SciDocument21 pagesRamirez Lee Kwon 2020 Appl SciOmen JettNo ratings yet
- Summary of The Radar Calibration WorkshopDocument3 pagesSummary of The Radar Calibration WorkshopMaxi GarzonNo ratings yet
- A UAV Detection Algorithm Based On An Artificial Neural NetworkDocument9 pagesA UAV Detection Algorithm Based On An Artificial Neural NetworkanjulNo ratings yet
- 03 DevelopmentDocument32 pages03 DevelopmentMehul MakwanNo ratings yet
- SBIR GovDocument4 pagesSBIR GovgrenzoNo ratings yet
- 10.4 Comparative Analysis of Terminal Wind-Shear Detection SystemsDocument11 pages10.4 Comparative Analysis of Terminal Wind-Shear Detection SystemsSii Olog-olog PlonkNo ratings yet
- Proceedings of Spie: Newer Aerial Platform For Emergency Response by The United States Department of EnergyDocument11 pagesProceedings of Spie: Newer Aerial Platform For Emergency Response by The United States Department of EnergyAbdul MajidNo ratings yet
- RADAR SystemsDocument8 pagesRADAR SystemsAlex BrenesNo ratings yet
- 10 1 1 148 4197Document5 pages10 1 1 148 4197kirancallsNo ratings yet
- Libre 1Document2 pagesLibre 1Adolf MartinNo ratings yet
- Performance Evaluation of Seasonde High-Frequency Radar For Vessel DetectionDocument11 pagesPerformance Evaluation of Seasonde High-Frequency Radar For Vessel DetectiondndosecNo ratings yet
- Analysis of Radar and ADS-B Influences On AircraftDocument14 pagesAnalysis of Radar and ADS-B Influences On AircraftIsrrael Caceres MNo ratings yet
- Micro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Document10 pagesMicro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Srini VasuluNo ratings yet
- SABRaesawhitepaperDocument17 pagesSABRaesawhitepaperJosé Luis DelgadoNo ratings yet
- LL ESAV2008 VersDocument7 pagesLL ESAV2008 Versfariz amrilahNo ratings yet
- Drones 03 00038 v2Document22 pagesDrones 03 00038 v2Adik Susilo WNo ratings yet
- Decentralized Perimeter Surveillance Using A Team of UavsDocument11 pagesDecentralized Perimeter Surveillance Using A Team of UavsOM2019No ratings yet
- Nov 07 BAMS Article ZrnicDocument41 pagesNov 07 BAMS Article ZrnicKamaraj PandianNo ratings yet
- Autonomus Chemical-Sensing Aerial Robot For UrbanSuburban Environmental MonitoringDocument12 pagesAutonomus Chemical-Sensing Aerial Robot For UrbanSuburban Environmental Monitoringdiazwarsenanto11No ratings yet
- Multifunction Phased Array Radar SymposiumDocument5 pagesMultifunction Phased Array Radar SymposiumfaridshNo ratings yet
- Validation of The NATO-Standard Ship Signature Model (SHIPIR)Document11 pagesValidation of The NATO-Standard Ship Signature Model (SHIPIR)mapache1111No ratings yet
- Displaced Phase Center Antenna TechniqueDocument16 pagesDisplaced Phase Center Antenna Techniquednn2No ratings yet
- 2006 - Pehrsson Et Al - Volume Sensor For Damage Assessment and Situational AwarenessDocument10 pages2006 - Pehrsson Et Al - Volume Sensor For Damage Assessment and Situational AwarenessGustavo PragerNo ratings yet
- T8 B16 Misc Work Papers FDR - 3-18-03 Norad and 9-11 Radar Files by Miles Kara (Clipped W Reference Material)Document16 pagesT8 B16 Misc Work Papers FDR - 3-18-03 Norad and 9-11 Radar Files by Miles Kara (Clipped W Reference Material)9/11 Document Archive100% (1)
- Nano Enabled Coating Makes Aircraft Invisible PDFDocument30 pagesNano Enabled Coating Makes Aircraft Invisible PDFmritunjay1987100% (1)
- Development of A Generic Guidance Navigation & ControlDocument24 pagesDevelopment of A Generic Guidance Navigation & ControlPradip SarkerNo ratings yet
- Sandino U2Document14 pagesSandino U2OM SARDESAI225286No ratings yet
- An Overview of Radar Cross Section Measurement Techniques: Airplanes AIRDocument3 pagesAn Overview of Radar Cross Section Measurement Techniques: Airplanes AIRiamnbroneNo ratings yet
- Svs Group of InstitutionsDocument22 pagesSvs Group of InstitutionsRaj NagNo ratings yet
- Aplicaciones MilitaresDocument4 pagesAplicaciones MilitaresMabel NúñezNo ratings yet
- Main Manuscript SubmittedDocument40 pagesMain Manuscript SubmittedWilliam DeerNo ratings yet
- Sensors 18 04363Document14 pagesSensors 18 04363UsdhdjdkNo ratings yet
- Micro-Drone For Gas Measurement in Hazardous Scenarios Via Remote SensingDocument4 pagesMicro-Drone For Gas Measurement in Hazardous Scenarios Via Remote Sensingito300No ratings yet
- CALIPSO Lidar Description and Performance Assessment: OlumeDocument15 pagesCALIPSO Lidar Description and Performance Assessment: Olumebitconcepts9781No ratings yet
- The CleoSim Radar SimulatorDocument10 pagesThe CleoSim Radar SimulatorRoberto CostantiniNo ratings yet
- Chapter-1: 1.1 RADAR SystemsDocument11 pagesChapter-1: 1.1 RADAR SystemsRajesh Kumar ChituproluNo ratings yet
- Frequency Spectrum For New Aviation Data Links: Initial Study ResultsDocument51 pagesFrequency Spectrum For New Aviation Data Links: Initial Study Resultsstanpjames2309No ratings yet
- Preprints201808 0313 v1Document12 pagesPreprints201808 0313 v1Abdul Hadi ButtNo ratings yet
- J1.10 Faa Surveillance Radar Data As A Complement To The Wsr-88D NetworkDocument5 pagesJ1.10 Faa Surveillance Radar Data As A Complement To The Wsr-88D NetworkDai NgocNo ratings yet
- Review of The Evolution of Phased-Array RadarDocument4 pagesReview of The Evolution of Phased-Array RadarSushmitha ThulasimaniNo ratings yet
- Markets For UavDocument10 pagesMarkets For UavLarasmoyo NugrohoNo ratings yet
- Measurements of Wind and Turbulence Profiles WithDocument7 pagesMeasurements of Wind and Turbulence Profiles WithJeferson Tondo AlvesNo ratings yet
- Kellner2019 Article NewOpportunitiesForForestRemotDocument19 pagesKellner2019 Article NewOpportunitiesForForestRemotNaveen Kumar PNo ratings yet
- 2006 03 06 Lockheed Martin Launches First of Two Slice R Crew Vessels For Transporting Workers To Mexican Offshore RigsDocument2 pages2006 03 06 Lockheed Martin Launches First of Two Slice R Crew Vessels For Transporting Workers To Mexican Offshore RigsScott_B4UNo ratings yet
- Apache AH-64 30x113mm Target Practice SpotterDocument17 pagesApache AH-64 30x113mm Target Practice SpotterScott_B4UNo ratings yet
- ADA417401 - XM35 105mm Gun With FOOB PDFDocument57 pagesADA417401 - XM35 105mm Gun With FOOB PDFScott_B4UNo ratings yet
- MV7000 Brochure enDocument16 pagesMV7000 Brochure enmani_208eeNo ratings yet
- Wartsila - V31 Diesel Engine - Brochure-O-E-W-31 PDFDocument4 pagesWartsila - V31 Diesel Engine - Brochure-O-E-W-31 PDFScott_B4UNo ratings yet
- ARTY - Aubert Et Duval - Produits - Longs - GB PDFDocument6 pagesARTY - Aubert Et Duval - Produits - Longs - GB PDFScott_B4UNo ratings yet
- Greek Eas Pyrkal - 155 MM Er-DpicmDocument2 pagesGreek Eas Pyrkal - 155 MM Er-DpicmScott_B4UNo ratings yet
- 2007 Swarming in Warfare PaperDocument36 pages2007 Swarming in Warfare PaperScott_B4UNo ratings yet
- Greek EAS Pyrkal - 155mm M107Document2 pagesGreek EAS Pyrkal - 155mm M107Scott_B4UNo ratings yet
- Waste Heat Recovery Economizer After Auxiliary Engines: Aalborg XS-TC7A - For Retrofit and New InstallationsDocument2 pagesWaste Heat Recovery Economizer After Auxiliary Engines: Aalborg XS-TC7A - For Retrofit and New InstallationsScott_B4UNo ratings yet
- Abb CRP AzipodDocument16 pagesAbb CRP AzipodScott_B4U50% (2)
- Design of A Wireless Power Transfer System For AssDocument16 pagesDesign of A Wireless Power Transfer System For AssJerin TasnimNo ratings yet
- TK3723+Data+Sheet+v0 23Document89 pagesTK3723+Data+Sheet+v0 23Phong LêNo ratings yet
- EasyLogic DM1000 DM3000 Series METSEDM1210Document3 pagesEasyLogic DM1000 DM3000 Series METSEDM1210Electrical DistributionNo ratings yet
- GATE: - A Gate Is Defined As A Digital Circuit WhichDocument14 pagesGATE: - A Gate Is Defined As A Digital Circuit WhichvivekNo ratings yet
- 2000 Series Wall Mount Sounder/VAD, Multi-Tone, Deep Base, RED FlashDocument2 pages2000 Series Wall Mount Sounder/VAD, Multi-Tone, Deep Base, RED FlashSuhail EhtishamNo ratings yet
- 2222ADocument9 pages2222AMarlon Henry Arosemena ZúñigaNo ratings yet
- JamMan Solo Manual 180815BDocument52 pagesJamMan Solo Manual 180815Brufusdexter100% (1)
- Automotive Precision Efuse Reference DesignDocument43 pagesAutomotive Precision Efuse Reference DesignAlbertoGonzálezNo ratings yet
- FCM-1 (A) & FRM-1 (A) Series: Control and Relay ModulesDocument2 pagesFCM-1 (A) & FRM-1 (A) Series: Control and Relay ModulesAlejandro RoperoNo ratings yet
- Module 5: Advanced Transmission Lines Topic 3: Crosstalk: OGI EE564 Howard HeckDocument35 pagesModule 5: Advanced Transmission Lines Topic 3: Crosstalk: OGI EE564 Howard HeckVivek ShrivastavaNo ratings yet
- Smart PV Controller: SUN2000-33KTL-ADocument2 pagesSmart PV Controller: SUN2000-33KTL-ALucas NascimentoNo ratings yet
- Grundig Chassis TY - SMDocument145 pagesGrundig Chassis TY - SMFrank B.No ratings yet
- Plume P6 Pro-PGN518 Diagram 1Document1 pagePlume P6 Pro-PGN518 Diagram 1Life PowerNo ratings yet
- VHLP2 11WDocument5 pagesVHLP2 11WRian IbayanNo ratings yet
- Andreas - F - Molisch (Read Explanation From Text Book.)Document33 pagesAndreas - F - Molisch (Read Explanation From Text Book.)Supreeth MudduchettyNo ratings yet
- Harman Kardon SB 16 230 Service ManualDocument29 pagesHarman Kardon SB 16 230 Service Manualcory riceNo ratings yet
- Preface: International Telecommunication UnionDocument353 pagesPreface: International Telecommunication UnioniiiNo ratings yet
- OFERTA DISTRIBUTIE - 8.12.2009: Netbook Dell Pret Cu Tva GarantieDocument35 pagesOFERTA DISTRIBUTIE - 8.12.2009: Netbook Dell Pret Cu Tva Garantiemaiko93No ratings yet
- Watchdog Timer On The PIC18F4525Document6 pagesWatchdog Timer On The PIC18F4525Carlos LMNo ratings yet
- Sequential Design Using Schematic Capture: ELEC 4200Document8 pagesSequential Design Using Schematic Capture: ELEC 4200ILikeScribd5050No ratings yet
- I 2 I F 2 F F I 2 5 5 I P 2 P P 4 P 5 P 6 P 7 P 8 P P U S I: Control Unit For Swing Gate Single or Double Leaf 230VDocument6 pagesI 2 I F 2 F F I 2 5 5 I P 2 P P 4 P 5 P 6 P 7 P 8 P P U S I: Control Unit For Swing Gate Single or Double Leaf 230VAndrei C.No ratings yet
- Siemens PROFIBUS - 2015 EngDocument356 pagesSiemens PROFIBUS - 2015 EngIsmaelNo ratings yet
- NPN/PNP Silicon AF Transistor Array: BC847PNDocument6 pagesNPN/PNP Silicon AF Transistor Array: BC847PNroozbehxoxNo ratings yet
- AMD Geode LX EPIC RDK PDFDocument26 pagesAMD Geode LX EPIC RDK PDFURINo ratings yet