You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- AVR 450T and 450 MDocument20 pagesAVR 450T and 450 Mjadi purwonoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Motorola Two Tone & Four Tone PagingDocument9 pagesMotorola Two Tone & Four Tone PagingfakemanNo ratings yet
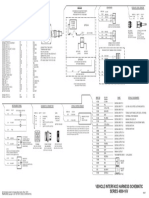
- SERIES 4000-16V Vehicle Interface Harness SchematicDocument1 pageSERIES 4000-16V Vehicle Interface Harness Schematicluna281068No ratings yet
- I2CDocument29 pagesI2CVidushi GheerNo ratings yet
- Digital Lab Cs 6211 VHDL ProgramsDocument13 pagesDigital Lab Cs 6211 VHDL ProgramsMurugan GNo ratings yet
- Vertical Cavity SurfaceDocument17 pagesVertical Cavity SurfaceGabriel DonovanNo ratings yet
- ANALOG CIRCUITS 18EC42 (Module - 4)Document22 pagesANALOG CIRCUITS 18EC42 (Module - 4)mahendra naik100% (10)
- Guideline - Coloring Label Jumper Antenna - RRUDocument35 pagesGuideline - Coloring Label Jumper Antenna - RRUArrival Hidayatullah100% (2)
- Wiring: Digital Controller Instruction ManualDocument1 pageWiring: Digital Controller Instruction ManualEdy WijayaNo ratings yet
- A New Framework For Smartphone Sensor Based Human Activity Recognition Using Graph Neural NetworkDocument8 pagesA New Framework For Smartphone Sensor Based Human Activity Recognition Using Graph Neural NetworkΓιάννης ΜανουσαρίδηςNo ratings yet
- Termination and Interface of On Semiconductor ECL Devices With CML (Current Mode Logic) OUTPUT StructureDocument10 pagesTermination and Interface of On Semiconductor ECL Devices With CML (Current Mode Logic) OUTPUT Structuretian yuNo ratings yet
- Q2 Week 1 CSSDocument25 pagesQ2 Week 1 CSScharleneNo ratings yet
- Mid-Term Exam (Solution) - 2Document5 pagesMid-Term Exam (Solution) - 2Engineer yousef mohamedNo ratings yet
- LM24 SR 2.0 US 4Nm 19559Document2 pagesLM24 SR 2.0 US 4Nm 19559Multiservici Campo EliasNo ratings yet
- Plastics SolutionsDocument20 pagesPlastics SolutionsGavazzi JuarezNo ratings yet
- Letter - Draft MS For Energy SavingDocument10 pagesLetter - Draft MS For Energy Savingamit guinNo ratings yet
- Lifepo4 Battery 32700 6000mah Cells SpecificationsDocument13 pagesLifepo4 Battery 32700 6000mah Cells SpecificationsveraNo ratings yet
- Chem 131 Lesson 8Document5 pagesChem 131 Lesson 8Denampo Ivan MikhaelNo ratings yet
- Non-Illuminated Selector Switches 2, 3 Positions, Round SeriesDocument8 pagesNon-Illuminated Selector Switches 2, 3 Positions, Round SeriesFabien LebaigneurNo ratings yet
- IC 555 TimerDocument32 pagesIC 555 TimerAmaradi KondababuNo ratings yet
- DBX PA Cut SheetA2Document2 pagesDBX PA Cut SheetA2Willy WakkerNo ratings yet
- Autonomous Indoor Navigation Robot PDFDocument15 pagesAutonomous Indoor Navigation Robot PDFAkshyaNo ratings yet
- Wring For The 2856670 Pyrometer G3512Document13 pagesWring For The 2856670 Pyrometer G3512PLANTAS ELECTRICAS H&BNo ratings yet
- Benefits of Live Line WokDocument12 pagesBenefits of Live Line Woksukh palNo ratings yet
- 8.10 Protection of Capacitor BanksDocument20 pages8.10 Protection of Capacitor BanksAndres MismoNo ratings yet
- Technical Data: An Innovative & Cutting-Edge Digital Radiography SystemDocument12 pagesTechnical Data: An Innovative & Cutting-Edge Digital Radiography SystemJacques GamelinNo ratings yet
- Qa 700 PDFDocument2 pagesQa 700 PDFDani HpNo ratings yet
- Gujarat Technological UniversityDocument1 pageGujarat Technological Universitymec091ownerNo ratings yet
- 3RT20251AB00 Datasheet enDocument12 pages3RT20251AB00 Datasheet enAkif AzayevNo ratings yet