Professional Documents
Culture Documents
Konst I WS0708 Gesamt
Uploaded by
sabatinCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Konst I WS0708 Gesamt
Uploaded by
sabatinCopyright:
Available Formats
Prof. Dr. W.
Stenkamp
Konstruktion I
September 2007
Getriebe mit
Hohlwelle
Trommelbremse Strmungskupplung
Schwinge
E-Motor
Getriebe mit
Hohlwelle
Trommelbremse Strmungskupplung
Schwinge
E-Motor
Antriebssystem
Frderbandantrieb
Vorlesungsergnzung Konstruktion I Thema: Inhalt
Prof. Dr. W. Stenkamp
Seite I
Lehrgebiet: Konstruktion I ( V2 / 2 ) Prfungsleistung K2 + E oder R + E
Vorlesung
1. Zahnrder und Zahnradgetriebe
1.1 Allgemeines
1.2 Verzahnungsgesetz
1.3 Erzeugung von Evolventenprofilen
1.4 Bezugsprofil und Herstellung der Evolventenverzahnung
1.5 Geometrie der Geradzahnstirnrder mit Evolventenverzahnung
1.5.1 Begriffe und Bestimmungsgren
1.5.2 Verzahnungsmae der Nullrder
1.5.3 Eingriffsstrecke, Profilberdeckung
1.5.4 Unterschnitt, Grenzzhnezahl und Profilverschiebung
1.5.5 Evolventenfunktion-Zahndicke
1.5.6 Zahnradpaarung
1.6 Geometrie der Schrgstirnrder
1.7 Berechnungsbeispiel, Schrgverzahnung-Geometrie, Roloff/Matek S. 711
1.8 Toleranzen, Verzahnungsqualitt
1.9 Zahnkrfte
1.10 Tragfhigkeitsberechnung
1.11 Berechnungsbeispiel, Schrgverzahnung-Tragfhigkeit, Roloff/Matek S. 711
1.12 Entwurfsberechnung
1.13 Gestaltung von Getrieben Beispiele-
2. Kupplungen
2.1 Aufgaben und systematische Einteilung
2.2 Berechnungsgrundlagen
2.3 Bauformen nicht schaltbarer Kupplungen
2.4 Bauformen schaltbarer Kupplungen
bungen:
Einfhrung in die Nutzung umfangreicher Berechnungssoftware.
Rechneruntersttzte Bearbeitung einer Entwurfsaufgabe als Studienarbeit am Beispiel einer
Maschine zur bertragung mechanischer Leistung.
Prfungsanforderungen
Kenntnisse ber die Berechnungsgrundlagen und Eigenschaften von Kupplungen. Vertiefte
Kenntnisse ber die geometrische Auslegung von Stirnradgetrieben, deren
Festigkeitsberechnung und Gestaltung.
Vorlesungsergnzung Konstruktion I Thema: Inhalt
Prof. Dr. W. Stenkamp
Seite II
Literatur
Roloff/Matek Maschinenelemente Lehrbuch 2005 Vieweg Verlag 17. Auflage
Rolof/Matek Maschinenelemente Tabellen 2005 Vieweg Verlag 17. Auflage
Niemann/Winter Maschinenelemente 1985 Springer Verlag 2. Auflage
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
1
1. Zahnrder und Zahnradgetriebe
1.1 Allgemeines
Bild 1.1 zeigt den prinzipiellen Aufbau einer Maschinenanlage (z.B. Frderbandantrieb).
Drehzahl n
ab
und Drehmomentenbedarf T
ab
der Arbeitsmaschine (Frderband) sind durch
den Arbeitsprozess vorgegeben.
Beispiele fr Maschinenanlagen:
n
ab
konstant, sehr hoch und T
ab
konstant bei einem Verdichter,
n
ab
klein und T
ab
konstant, gro bei einem Frderband oder manchen
Werkzeugmaschinen,
wechselnd: n
ab
klein / T
ab
gro beim Anfahren eines Kraftfahrzeuges und n
ab
gro /
T
ab
klein beim Fahren in der Ebene,
geradlinige Vorschubbewegung mit unterschiedlicher Geschwindigkeit
(Werkzeugmaschine).
Der meist verwendete, robuste Drehstrom-Asynchron-Motor wird aus Kostengrnden 2 -, 4 -
oder 6 polig ausgefhrt. Bei einer Netzfrequenz von 50 Hz liegen damit die
Synchrondrehzahlen n
s
= 3 000, 1 500 oder 750 min
-1
fest. Auch ein Verbrennungsmotor
arbeitet nur in einem kleinen Drehzahlbereich wirtschaftlich. Turbinen kleiner und mittlerer
Leistung werden aus demselben Grund fr hohe Drehzahlen ausgelegt.
Das Getriebe wandelt Drehzahl und Drehmoment der Kraftmaschine und passt beide
dem Bedarf der Arbeitsmaschine an
Je nach der Art des Arbeitsprozesses bentigt man demnach Getriebe mit konstanter oder
mit vernderlicher bersetzung (Verstellgetriebe). Bleibt das Verhltnis zwischen An- und
Abtriebdrehzahl konstant, so spricht man von gleichfrmig bersetzenden Getrieben. Ein
Getriebe besteht im Prinzip aus mindestens drei Gliedern: Antriebs- und Abtriebswelle und
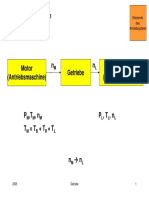
Bild 1.1 Bezeichnungen fr Getriebe und Kupplung bei Leistungsbertragung
Motor
P
an ; n
an ;
T
an
Frderband
P
ab ; n
ab ;
P
v
1 Drehstrommotor
2 Kupplung
3 Trommelbremse
4 Getriebe
5 Frderbandtrommel
6 Stehlager
7 Drehmomentensttze
P
an
zugefhrte Leistung
P
ab
abgefhrte Leistung
P
v
Verlustleistung Antriebssystem
Getriebe
Drehmoment T
an
> oder < T
ab
Drehzahl n
an
> oder < n
ab
Leistung P
an
= P
ab
+ P
v
Kupplung
Drehmoment T
an
= T
ab
Drehzahl n
an
n
ab
Leistung P
an
= P
ab
+ P
v
Verlustleistung P
v
bei Schlupf
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
2
feststehendem Gestell (Gehuse), in dem beide Wellen miteinander gekoppelt sind. Das
Gestell bertrgt ein Absttzmoment auf das Fundament.
bersetzung i = n
an
/ n
ab
= n
1
/ n
2
=
1
/
2
Getriebe mehrstufig i = i
1,2
i
3,4
i
5,6
......
Leistung P P = T = P
ab
= P
an
= konstant mit Wirkungsgrad = 1
Absttzmoment(Gestell) T
G
= T
ab
- T
an
Die Bewegungsbertragung kann dabei entweder formschlssig oder reibschlssig erfolgen.
Die wichtigsten Bauarten formschlssiger Getriebe sind in Bild 1.2 dargestellt
a) Schraubradgetriebe b) Schneckengetriebe c) Kegelschraubgetriebe (Hypoidrder)
Bild 1.2 Bauarten von Getrieben
Wellen parallel
Wellen schneiden sich
a) b) c)
Wellen
kreuzen sich
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
3
1.2 Verzahnungsgesetz
Umfangsgeschwindigkeit v
t
= r
1
1
= r
2
2
bersetzung i =
1
/
2
= - r
2
/ r
1
= konstant
Bild 1.4 Eingriffsstellungen und Umfangsgeschwindigkeiten. a) bei Beginn ( v
1
< v
2
), b) in der
Mitte (v
1
= v
2
), c) am Ende des Eingriffs (v
1
> v
2
)
v
1
=
1
R
1
und v
2
=
2
R
2
; i =
1
/
2
= (v
1
R
2
) / (v
2
R
1
) = konstant
im Wlzpunkt C (Bild 1.4 b): R
1
= r
1
und R
2
= r
2
und damit i =
1
/
2
= - r
2
/ r
1
Zerlegen der Umfangsgeschwindigkeit v
1
und v
2
nach Bild 1.5 in Richtung der gemeinsamen
Tangenten und Normalen
v
n1
=
1
r
n1
; v
n1
/ v
1
= (
1
r
n1
) / (
1
R
1
) = r
n1
/ R
1
v
n2
=
2
r
n2
; v
n2
/ v
2
= (
2
r
n2
) / (
2
R
2
) = r
n2
/ R
2
Bild 1.3 Wlzzylinder mit
gemeinsamer Wlzebene
1 Achse des Kleinrades (Ritzel); treibend mit
1
2 Achse des Grorades (Rad); getrieben mit
2
a Achsabstand a = (r
1
+r
2
) / 2
Ein Zahnradpaar muss Drehmoment wandeln und die
Drehbewegung von einer Welle auf eine zweite
gleichfrmig bertragen, d.h., es muss
1
/
2
=
konstant sein. Dies geschieht, wenn zwei
Wlzzylinder mit gemeinsamer Wlzebene ohne
Schlupf aufeinander abwlzen. Die Wlzachse C-C ist
dabei die Momentanachse der Bewegung. Da bei
Zahnrdern die Bewegung durch Formschluss
bertragen wird, mssen die Zahnformen so
beschaffen sein, dass sich in beide
zusammenlaufende Zahnrder gedachte Wlzzylinder
einschreiben lassen, die ohne Schlupf aufeinander
abwlzen.
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
4
Da die Normale durch den Wlzpunkt C geht mssen auch die Umfangsgeschwindigkeiten
v
n1
und v
n2
gleichgerichtet und gleich gro sein (v
n1
= v
n2
). Die Flanken wrden sich sonst
voneinander abheben oder die treibende sich in die getriebene eindrcken.
r
n1
(v
1
/ R
1
) = r
n2
(v
2
/ R
2
) Es gilt somit: (1.1)
r
n1
1
= r
n2
2
Die Gleichung besagt, dass der Schnittpunkt C der Wlzpunkt sein muss und dass r
1
und r
2
die Wlzkreisradien sind. Die Normale im Berhrungspunkt zweier Zahnflanken muss also
den Achsabstand a = r
1
+ r
2
im konstanten bersetzungsverhltnis teilen. Dieses Gesetz
heit das allgemeine Verzahnungsgesetz.
1.3 Erzeugung von Evolventenprofilen
Aus dem allgemeinen Verzahnungsgesetz geht hervor, dass alle Kurven, deren Normalen
den zugehrigen Wlzkreis in einer Richtung fortschreitend schneiden, als Flankenprofil
geeignet sind. Fr die Praxis sind jedoch nur solche Flankenprofile sinnvoll, die einfache
Eingriffslinien ergeben und die mit einfachen Werkzeugen sehr genau hergestellt werden
knnen. Neben der wirtschaftlichen Herstellung ist natrlich die Austauschbarkeit
(Ersatzteile) ein wichtiges Argument fr die Einschrnkung der Vielzahl unterschiedlicher
Flankenformen. Die im Maschinenbau vorherrschende Verzahnungsart ist die
Evolventenverzahnung mit Evolventen als Zahnflanken. Eine andere Verzahnungsart,
die Zykloidenverzahnung, wird fr besondere Anwendungen(z.B. Triebstockverzahnung)
eingesetzt.
Kreisevolventen sind Kurven, die ein Punkt einer Geraden beschreibt, der auf einen
Grundkreis mit dem Grundkreisradius r
b
abrollt (Bild 1.6a). Die Evolventenverzahnung zeigt
die Stirnprofile des Zahnrades als Teile der Evolventen (Bild1.6b). Bei einem
auenverzahntem Stirnpaar ist entsprechend dem Verzahnungsgesetz die Eingriffslinie eine
Gerade (Rollgerade), die beide Grundkreise der Rder r
b1
und r
b2
in den Punkten T
1
und T
2
i =
1
/
2
= - r
n2
/ r
n1
= - r
2
/ r
1
Verzahnungsgesetz:
Die Verzahnung ist zur bertragung einer
Drehbewegung mit konstanter bersetzung
dann brauchbar, wenn die gemeinsame
Normale n-n in jedem Eingriffspunkt
(Berhrung) B zweier Zahnflanken durch den
Wlzpunkt C geht.
Neben dem Wlzen tritt Gleiten auf.
Gleitgeschwindigkeit v
g
= v
t2
v
t1
Bei Berhrung der Zahnflanken im Wlzpunkt C
tritt kein Gleiten auf (reines Wlzen).
Mit v
1
> v
2
ist bei Kopfangriff am Rad 1 die
Gleitgeschwindigkeit negativ. Die Bahn die der
Berhrungspunkt B beschreibt ist die
Eingriffslinie. Sie ist also der geometrische Ort
aller aufeinander folgenden Berhrungspunkte
zweier Zahnflanken.
Zwei Flankenprofile knnen nur
zusammenarbeiten, wenn Sie die gleichen
Eingriffslinien haben, deren Verlauf durch
das Verzahnungsgesetz festgelegt ist.
Bild 1.5 Geschwindigkeitsvektoren
beim Zahneingriff
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
5
tangiert (Bild 1.7). Die Eingriffslinie schliet mit der Tangente an die Grundkreise in C den
Winkel ein, der als Eingriffswinkel bezeichnet wird.
Bild 1.6 a) Kreisevolvente b) Evolventen am Bild 1.7 Grundlagen der Evolventenverzahnung
Stirnrad
Bild 1.8 Erzeugung eines Radzahnprofiles mit
einem geradlinigen Zahnstangenprofil
Die Erzeugung eines Zahnprofiles mit einem
geradlinigen Zahnprofil b
2
, das zu einer
Zahnstange mit r
2
gehrt, bietet den
Vorteil einer aufwandarmen Herstellung des
bentigten Herstellwerkzeuges.
Anhand von Bild 1.8 lassen sich folgende
Schritte erklren:
- Auf Zahnprofil b
2
Punkt B
2
whlen und
Normale in B
2
auf b
2
in C`mit Rollgeraden zum
Schnitt bringen.
- Teilkreise um Strecke CC`= Bogenlnge CC
abrollen lassen, so dass B
2
nach B gelangt. B
stellt einen Punkt der Eingriffslinie dar, da die
Profilnormale durch den Wlzpunk C geht und
das Verzahnungsgesetz erfllt ist.
- Durch Drehen des Rades in seine
Ausgangsposition kommt der Punkt B nach B
1
.
B
1
ist ein Punkt des gesuchten Zahnprofiles b
1
.
Alle Punkte B
j
mit i = 1, 2, 3, .... ergeben das
Zahnprofil b
1
.
- Alle Punkte der Eingriffslinie liegen auf der
Geraden durch C und B.
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
6
- =
0
ist der halbe Eingriffswinkel des Zahnstangenprofils. Man bezeichnet ihn auch als
Herstellungseingriffswinkel.
- Der kleinste Kreis fr die Konstruktion von B
j
Punkten tangiert im Punkt T
1
die
Eingriffsgerade. Er heit Grundkreis mit dem Radius r
b1
.
- Die Eingriffsgerade rollt bei der Erzeugung der Punkte B
j
auf dem Grundkreis ab. Das
erzeugte Profil b
1
ist also ein Evolventenprofil.
- Der Endpunkt C eines um den Grundkreis gewickelten Fadens beschreibt beim gestrafften
abrollen eine Kurvenbahn, die gleich der Evolvente b
1
ist. Die Strecken CTstellen jeweils die
Krmmungsradien der Evolventen dar.
- Die Eingriffslinie ist zentralsymmetrisch
- Mit vorgegebenem geradlinigen Zahnprofil b
2
lassen sich durch unterschiedlich groe
Teilkreisradien r
1
verschiedene Evolventenprofile b
1
erzeugen. Sie haben alle die gleiche
zentralsymmetrische Eingriffslinie. Somit sind die verschiedenen Evolventenprofile b
1
unter
Wahrung des Verzahnungsgesetzes untereinander paarbar.
- Evolventenprofile haben also Satzrdereigenschaften, da Eingriffsprofile vom Wlzpunkt
zum Zahnfu mit Eingriffsprofilen vom Wlzpunkt zum Zahnkopf miteinander kmmen
knnen.
1.4 Bezugsprofil und Herstellung der Evolventenverzahnung
Wird die Zhnezahl des Rades z
2
= , so werden der Wlzkreisradius r
2
und der Grundkreis
r
b2
unendlich gro. Das heit, der Wlzkreis 2 geht in eine Wlzgerade ber, die Flanke 2
wird geradlinig, und es entsteht auf diese Art ein Zahnstangengetriebe (Bild 1.9). Das
entstehende Zahnprofil (von der Ausrundung im Fu abgesehen) wird auch Bezugsprofil
genannt. Es ist in DIN 867 mit =
P
=
0
(= halber Flankenwinkel) genormt (Bild 1.10). Aus
Bild 1.11 geht hervor, dass man die Flanke des Rades 1 auch dadurch erhlt, das man die
Zahnstange mit ihrer Wlzgeraden am Wlzkreis 1 abrollt. Hierauf beruht die einfachste und
am meisten verwendete Herstellung von Evolventenverzahnungen mit Hilfe von
geradflankigen Zahnstangenwerkzeugen (Hobelkamm, Abwlzfrser). Das Zahnstangen-
Werkzeugprofil ist in Bild 1.10 dargestellt.
Bild 1.9
Evolventen-Zahnstangen-
getriebe mit z
2
=
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
7
Aus praktischen Grnden (Austauschbarkeit und Vereinheitlichung der Werkzeuge) ist eine
Normverzahnung mit einem Eingriffswinkel = 20festgelegt worden. Der Profilwinkel
P
ist somit gleich dem Eingriffswinkel . Die Mae am Bezugsprofil sind festgelegt durch den
Modul m und die Profilbezugslinie : auf P-P werden die Teilung p, die Zahndicke s und
die Lckenweite e angegeben; auf P-P bezogen werden die Kopfhhe h
aP
= m (m =
Modul) und die die Fuhhe h
fP
= m + c, die zusammen die Zahnhhe des Bezugsprofils
h
P
= 2m + c ergeben. Die nutzbare Zahnflanke ist durch die gemeinsame Zahnhhe h
wP
=
2m festgelegt.
Fr die Herstellung der Fuausrundung sind dem Kopfspiel entsprechend die
Werkzeugschneiden ber das Ma m hinaus verlngert. Die Kopfspielrundung muss an oder
unterhalb von A
2
beginnen, so das der Abrundungsradius
a0
= c / (1 - sin
0
) wird.
Zahnflanken knnen auch mit einem Schneidrad hergestellt werden (Bild 1.13), das
hinterschliffene Zahnflanken und einen hinterschliffenen Auendurchmesser besitzt. Dieses
Schneidrad fhrt beim Abwlzen wie der Hobelkamm eine hin- und hergehende
Stobewegung in Zahnrichtung aus. In DIN 3972 sind abhngig vom Fertigungsverfahren
vier Werkzeug-Bezugsprofile mit unterschiedlichen Zahnhhen definiert
P P
Bild 1.10
Bezugsprofil
nach DIN 867
Bild 1.11 Herstellung einer Evolventenverzahnung mit geradflankigem Zahnstangen-
Werkzeug
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
8
Bild 1.13 a) Wlzstoen mit Schneidrad b) Wlzhobeln mit Hobelkamm
c) Hllschnitte d) Wlzfrsen
Bild 1.12 nebenstehend
a) Zahnflanke nach Abspanen der
Bearbeitungszugabe t
n
b) Abspanen mit Protuberanz-
Wlzfrser
Durch das Abspanen der
Bearbeitungszugabe beim Schleifen
entsteht eine Kerbe am Zahnfu und
mindert die Dauerhaltbarkeit des
Zahnes. Die lsst sich vermeiden durch
Freiarbeiten des Zahnfues bei
Vorbearbeitung mittels Protuberanz-
Wlzfrser (Sonderwerkzeug).
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
9
1.5 Geometrie der Geradzahnstirnrder mit Evolventenverzahnung
1.5.1 Begriffe und Bestimmungsgren
Fr die Verzahnungen der Stirnrder werden die in Bild 1.14 dargestellten Bezeichnungen
verwendet. Das Kleinrad(Ritzel) erhlt den Index 1 und das Grorad(Rad) den Index 2 bzw.
ohne Index gelten die Gleichungen sowohl fr das Ritzel und das Rad. Unter der
Teilung p versteht man die auf dem Teilkreis gemessene Entfernung zwischen zwei
aufeinander folgenden Rechts- oder Linksflanken. Sind die Teilkreise gleich den
Wlzkreisen, so muss bei zwei miteinander kmmenden Rdern jeweils die gleiche Teilung p
vorhanden sein. Mit dem Teilkreisumfang U
1
= d
1
= z
1
p und U
2
= d
2
= z
2
p
erhlt man die
Teilkreisdurchmesser d
1,2
=
p
z
1,2
= m z
1
,
2
mit p = m (1.2)
Die Teilung p wird also als Vielfaches von angegeben, wobei m als Modul bezeichnet wird
und eine Bezugsgre fr Zahnradabmessungen darstellt. Modulreihen sind in DIN 780
genormt (TB21-1).
Die Zahndicke s und die Lckenweite e ergnzen sich zu p = s + e.
Die Zahnflankenevolvente beginnt auf dem Grundkreis d
b
. Nach Bild 1.15 gilt mit dem
Grundkreisumfang U
b
= d
b
= z p
b
Grundkreisdurchmesser d
b1,2
= d
1,2
cos = z
1,2
m cos (1.3)
Grundkreisteilung p
b
= d
b1,2
/ z
1,2
= p cos (1.4)
Eingriffsteilung p
e
= p
b
(1.5)
Bild 1.14 Bezeichnungen am auenverzahnten Geradstirnrad Bild 1.15 Teilungen am
Geradstirnrad
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
10
Zahndickenhalbwinkel am Teilkreis = s / d (1.6)
Zahndickenhalbwinkel am Kopfkreis
a
= s
a
/ d
a
(1.7)
1.5.2 Verzahnungsmae der Nullrder
Wird bei der Erzeugung der Verzahnung die Profilbezugslinie P-P des Werkzeuges jeweils
auf dem Teilkreis von Ritzel und Rad abgerollt, entsteht ein Zahnradpaar mit Nullverzahnung
(die Wlzgerade fllt mit der Profilbezugslinie zusammen). Der Betriebseingriffswinkel
w
(Winkel zwischen der Tangente an die Grundkreise und der Wlzgeraden) ist gleich dem
Erzeugungseingriffswinkel = 20und die Erzeugungs-Wlzkreise gleich Teilkreise ( d
w1,2
=
d
1,2
) sind auch Betriebswlzkreise, die sich im Wlzpunkt C berhren (Null-Radpaar).
Die Zahnradabmessungen sind durch das Bezugsprofil nach DIN 867 (Bild 1.10) mit dem
Kopfspiel c, als Nennmae bestimmt:
Zahnkopfhhe h
a
= h
aP
= m (1.8)
Zahnfuhhe h
f
= h
fP
= m + c (1.9)
Zahnhhe h = h
a
+ h
f
= h
P
= 2m + c (1.10)
Kopfkreisdurchmesser d
a1,2
= d
1,2
+ 2 h
a
= m (z
1,2
+ 2) (1.11)
Fukreisdurchmesser d
f1,2
= d
1,2
- 2 h
f
(1.12)
Null-Achsabstand a
d
= (d
1
+ d
2
) / 2 (1.13)
Umfangsgeschwindigkeit am Teilkreis v = d
1
n
1
= d
2
n
2
(1.14)
bersetzung
2
1
2
1
n
n
i = == =
= == =
1
2
d
d
i = == =
1
2
z
z
i = == = (1.15)
Zhnezahlverhltnis mit z
2
z
1
u = -z
2
/ z
1
(1.16)
Bei gegebener bersetzung ins Langsame (i = u) lassen sich fr einen gewnschten Null-
Achsabstand a
d
die Teilkreisdurchmesser d
1
und d
2
berechnen zu
Bild 1.16 Null-Radpaar: Paarung zweier Nullrder mit gemeinsamen Bezugsprofil
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
11
Teilkreisdurchmesser
u 1
a 2
d
d
1
+ ++ +
= == =
u 1
u a 2
d
d
2
+ ++ +
= == =
1.5.3 Eingriffsstrecke, Profilberdeckung
1.5.4 Unterschnitt, Grenzzhnezahl und Profilverschiebung
Bild 1.17 Eingriffsstrecke = == = g AE
Um eine gleichfrmige Kraft- und Bewegungs-
bertragung eines auenverzahnten
Nullradpaares zu gewhrleisten, muss bereits ein
neuer Zahn im Eingriff sein, wenn der
vorhergehende Zahn auer Eingriff kommt. Die
durch den Schnittpunkt der Kopfkreise mit der
Eingriffslinie festgelegte Eingriffsstrecke
AE g = == = mu grer als die Eingriffsteilung p
e
sein (s. Bild 1.15 und Bild 1.16).
Es gilt nach Bild 1.17:
A T AE E T T T 2 1 2 1 + ++ + = == =
= == = + ++ + = == = g T T A T E T AE 2 1 2 1 (1.17)
( (( ( ) )) ) + ++ + = == = sin a d d d d 5 , 0 g d 2 b
2
2 a
2
1 b
2
1 a
2
Das Verhltnis der Eingriffsstrecke g
zur
Eingriffsteilung p
e
ist die Profilberdeckung
1 , 1
cos m
g
p
g
e
= == = = == =
(1.18)
Das Profil des Zahnfues kann durch
Abrollen der Profilmittellinie auf dem
Wlzkreis zeichnerisch bestimmt
werden, indem zuerst die Relativbahn
des Abrundungsmittelpunktes A
m
bestimmt und danach im Abstand die
Hllkurve (oder quidistante) gezogen
wird. Bei Zhnezahlen (z 17 bis 21)
gehen die Evolventen und die Hllkurve
(Fuausrundung) tangential ineinander
ber. Bei kleineren Zhnezahlen dringt
das Werkzeug jedoch zu weit in den
Zahnfu ein, so dass ein Unterschnitt
entsteht. In Bild 1.18 ist der Zahn eines
Zahnrades mit z = 17 Zhnen dargestellt,
bei dem infolge Unterschnitt der Zahnfu
viel zu schwach und die wirksame
Eingriffsstrecke zu klein ist. Ein Vergleich
von Bild 1.9 mit Bild 1.18 zeigt, dass
theoretisch nur dann eine brauchbare
Zahnform entsteht, wenn der Punkt A`
Bild 1.18 Unterschnitt am Zahnrad mit z = 7
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
12
auf T
1
liegt, da die nutzbare Evolvente oberhalb des Grundkreises liegen sollte. Es entsteht
also nur dann theoretisch eine brauchbare Zahnform, wenn der der Punkt A` innerhalb von
T
1
C
zu liegen kommt. Fr den Grenzfall (kein Unterschnitt) liegt A= A auf T
1
.
Um bei Zhnezahlen kleiner als der Grenzzhnezahl z = z
g
Unterschnitt zu vermeiden, wird
das Zahnprofil verschoben. Profilverschobene Zahnrder werden auch zur Anpassung von
vorgegebenen Achsabstnden verwendet oder um gnstigere Zahnformen, hhere
Tragfhigkeit oder bessere Gleit- und Verschleiverschleiverhltnisse zu erhalten.
Zur Herstellung eines profilverschobenen Zahnrades wird die Profilmittellinie des
Verzahnungswerkzeuges so verschoben, dass die Profilmittellinie nicht mehr den Wlzkreis
C berhrt, sondern das vielmehr eine um den Betrag der Profilverschiebung entfernte
Parallele zur Wlzgeraden wird (Bild 1.19). Die Profilverschiebung wird abhngig vom Modul
ausgedrckt. Ein Abrcken um den Betrag + x m von der Radmitte nach auen wird als
positive, eine Verschiebung um x m zur Radmitte nach innen wird als negative
Profilverschiebung bezeichnet. Der Faktor x heit Profilverschiebungsfaktor. In
Abhngigkeit von der Profilverschiebung ndert sich die Zahnform nach Bild 1.20.
Je nach Art der Profilverschiebung unterscheidet man:
-Nullrder, bei denen keine Profilverschiebung vorgenommen worden ist.
Das Nennma der Zahndicke am Teilkreis betrgt s = p / 2 = e (Lckenweite).
-V-Rder sind Zahnrder mit Profilverschiebung.
V
plus
- Rder haben positive Profilverschiebung, wodurch sich Kopf- und Fukreis
vergrern. Die Zhne werden am Zahnkopf spitzer und am Zahnfu breiter
Bild 1.19 Profilverschiebung
(Herstellung eines profilver-
schobenen Zahnrades)
Bild 1.20
Zahnform in Abhngigkeit
von der Profilverschiebung
a) beim Nullrad
b) bei pos. Verschiebung
c) bei neg. Verschiebung
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
13
gegenber Nullrder. Am Teilkreis gilt fr die Zahndicke s > p / 2 und e < p / 2
(Lckenweite).
V
minus
- Rder haben negative Profilverschiebung. Kopf- und Fukreis werden
kleiner. Am Teilkreis gilt s < p / 2 und e > p / 2. Die Unterschnittgefahr nimmt zu, der
Zahnfu wird geschwcht und die Tragfhigkeit vermindert.
Nach Bild 1.21 gilt:
2
sin z m
sin r
sin
) m x ) sin 1 ( h (
TC
g 0 a 0 a
= == = = == =
= == = (1.19)
z.B. mit dem Bezugsprofil II (h
a0
= 1,25 m ;
a0
= 0,2 m ; = 20) erhlt man
) x 12 , 1 ( 1 , 17 z z g = == = > >> > (1.20) und bei x = 0 die Grenzzhnezahl z
g
= 19.
Mit zunehmender Profilverschiebung kann die Grenzzhnezahl weiter herabgesetzt werden.
Bei einer bestimmten Gre der Profilverschiebung + x laufen die Flankenevolventen am
Kopfkreis zur Spitze zusammen, es tritt Spitzenbildung ein. Fr die praktische Anwendung
sollte jedoch die Kopfdicke des Zahnes den Wert s
a
0,2 m und bei gehrteten Zhnen
Um Eingriffsstrungen zu
vermeiden mssen die
Schnittpunkte der Kopfkreise A
und E auf der Eingriffslinie
zwischen den Tangentenpunkten
T
1
und T
2
liegen (Bild 1.16 und
Bild 1.17). Unterschnitt lsst sich
bei Geradverzahnung bei
Zhnezahlen unterhalb von
z = z
g
= 17 bis 21
vermeiden, wenn fr das
erzeugende Werkzeug mit der
Kopfhhe h
a0
und dem
Kopfkanten-
Rundungshalbmesser
a0
ein
Mindest-Profilverschiebungsfaktor
x
min
nicht unterschritten wird. Das
Bild 1.21 zeigt den Zahn eines
Rades mit der Grenzzhnezahl
z
g
, bei deren Unterschreitung
Unterschnitt entsteht ( Punkt A
2
am Werkzeug liegt auf dem
Tangentenpunkt am Grundkreis
r
b
), d.h. ein Teil der Evolvente
durch das Werkzeug weg-
geschnitten wrde.
Bild 1.21 Rad mit Zhnezahl an der Unterschnitts-
grenze und Bezugsprofil mit Werkzeugkopfabrundung
A2
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
14
s
a
0,4 m nicht unterschreiten. Die Evolventenfunktion gestattet die genaue Berechnung
von Abmessungen am Zahnrad und Getriebe, die fr Konstruktion, Herstellung und Prfung
wichtig sind, z.B. Zahndicken, Lckenweiten und Achsabstand.
1.5.5 Evolventenfunktion Zahndicke
+ ++ + = == = tan m x 2
2
p
s + ++ +
= == = tan m x 2
2
m
s (1.21)
= == = tan m x 2
2
m
e (1.22)
Bei positiver Provilverschiebung wird demnach die Zahndicke am Teilkreis grer und die
Zahnlcke am Teilkreis kleiner.
Evolventenbeziehung
y y tan = == =
y y y y inv tan = == = = == = (1.23)
= == = cos
r
r
cos
y
y u. = == = cos
r
r
cos
a
a
Die Zahndicke s
y
auf einem Kreis mit beliebigem Radius r
y
lsst sich bei gegebener
Zahndicke auf den Teilkreis mit Hilfe von Bild 1.24 ableiten:
Bild 1.22 Zahndicke am Teilkreis
bei Profilverschiebung
Wie nebenstehend dargestellt sind
herstellbedingt bei Profilverschiebung
die Zahndicke und Zahnlcke nicht
mehr gleich gro. Die Zahndicke und
die Zahnlcke wird mit p = m
allgemein am Teilkreis d
Die Evolvente eines Zahnrades entsteht, wenn man eine
Gerade an einem Grundkreis mit dem Radius r
b
abwlzt
(Bild 1.23). Es gilt:
y b y b y b r r tan r = == =
Die vorstehende Beziehung wird
Evolventenfunktion (inv = involut) genannt.
(1.24)
Bild 1.24
Zahndicken
Bild 1.23 Darstellung zur Herleitung
der Evolventenfunktion
y
G
0
P
y
Der Profilwinkel
y
und
a
kann
berechnet werden aus:
= == = cos r cos r y y
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
15
( (( ( ) )) ) [ [[ [ ] ]] ] = == = y y y r 2 s mit
r 2
s
= == = s = Zahndicke am Teilkreis
Mit = == = inv , y y inv = == = und z m r 2 = == = ergibt sich die Zahndicke an einem beliebigen
Radius r
y
( (( ( ) )) )
( (( (
( (( (
| || |
| || |
\ \\ \
| || |
+ ++ +
= == = inv inv tan x 2
2 z
1
r 2 s y y y (1.25)
und fr die Profilverschiebung von besonderem Interesse die Zahndicke am Radius r
a
( (( ( ) )) )
( (( (
( (( (
| || |
| || |
\ \\ \
| || |
+ ++ +
= == = inv inv tan x 2
2 z
1
r 2 s a a a (1.26)
Die Zahndicke am Kopfkreis sollte s
a
0,2 m sein und bei gehrteten Zahnrdern wird
s
a
0,4 m empfohlen. Auch der Radius r
sp
auf dem S liegt kann mit setzen von s
a
= 0
einfach berechnet werden. Analog kann die Lckenweite e
y
am beliebigen Durchmesser d
y
mit der Zahnlcke am Teilkreis e = m / 2 2 x m tan berechnet werden
( (( ( ) )) )
( (( (
( (( (
| || |
| || |
\ \\ \
| || |
= == = inv inv tan x 2
2 z
1
r 2 e y y y (1.27)
Mit zunehmender Profilverschiebung
nimmt die Zahndicke am Teilkreis zu
und die Zahnlcke wird kleiner. Bei
zunehmender negativer Verschiebung
(x ist negativ einzusetzen) nimmt die
Zahndicke am Teilkreis ab und die
Lckenweite wird grer.
Das nebenstehende Bild zeigt fr
Geradverzahnung mit Bezugsprofil II
den Verlauf der Grenzzhnezahlen z
gu
und z
gk
in Abhngigkeit vom
Profilverschiebungsfaktor x.
z = z
gu
= Grenzzhnezahl, bei deren
Unterschreitung Unterschnitt entsteht.
z = z
gk
= Grenzzhnezahl, bei deren
Unterschreitung die Zahnkopfdicke s
a
=
0,25 m wird.
z
g
Bild 1.25 Grenzzhnezahlen fr Geradverzahnung
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
16
1.5.6 Zahnradpaarung
Mit denselben Normwerkzeugen (
0
= 20) hergestellte V- und Nullrder knnen belieb ig
zusammengesetzt werden, ohne das Eingriffs- und Abwlzverhltnisse dadurch gestrt
werden. Wie in Bild 1.26 dargestellt, sind die Grund- und Teilkreisradien von der
Profilverschiebung unabhngig. Das bersetzungsverhltnis ist allein von den
Grundkreisen abhngig. Da dieselben Grundkreise vorliegen, ergeben sich also auch
die gleichen Evolventen. Alle anderen Gren wie Achsabstand, Wlz-, Fu- und
Kopfkreisradien, Teilung p
w
auf dem Betriebwlzkreis, Betriebseingriffswinkel
w
usw.
verndern sich mit der Profilverschiebung. In Bild 1.25 (rechts) ist der Achsabstand
auf a = a
d
a verringert ( x ist negativ). Je nach Paarung der Rder unterscheidet man:
- Nullgetriebe bei Paarung zweier Nullrder mit Nullachsabstand a
d
. Die Teilkreise
berhren sich im Wlzpunkt C.
- V-Nullgetriebe bei Paarung eines V
plus
- Rades mit einem V
minus
- Rad gleicher
positiver und negativer Profilverschiebung (x
1
+x
2
= 0). Die Teilkreise sind auch
Wlzkreise und berhren sich in C. Der Achsabstand a ist gleich dem Null-
Achsabstand a
d
.
- V-Getriebe, bei denen ein V-Rad mit einem Nullrad oder V-Rder mit
unterschiedlicher Profilverschiebung gepaart sind. Die Teilkreise sind nicht mehr
Wlzkreise, sondern es ergeben sich neue Wlzkreise, die Betriebswlzkreise (Bild
1.27). Der Achsabstand a ist ungleich a
d
und es ergibt sich ein Betriebseingriffswinkel
w
, der ungleich dem Eingriffswinkel ist.
Bei x < 0 wird a < a
d
und bei x > 0 wird a > a
d
Damit zwei Zahnrder spielfrei miteinander abwlzen knnen, muss die Summe der
Zahndicken s
w1
= e
w2
und s
w2
= e
w1
auf den Betriebswlzkreisen d
w1
und d
w2
gleich der
Teilung p
w
= s
w1
+e
w1
= s
w2
+ e
w2
sein (Bild 1.27). Es gilt nach Gl. (1.25):
( (( ( ) )) )
( (( (
( (( (
| || |
| || |
\ \\ \
| || |
+ ++ +
= == = inv inv tan x 2
2 z
1
r 2 s w 1
1
1 w 1 w (1.28)
Bild 1.26 Zahnradpaarung mit x = 0 (links) und mit x < 0 (rechts)
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
17
( (( ( ) )) )
( (( (
( (( (
| || |
| || |
\ \\ \
| || |
+ ++ +
= == = inv inv tan x 2
2 z
1
r 2 s w 2
2
2 w 2 w (1.29)
Mit
= == =
w 1
1 w
p z
r 2 und
= == =
w 2
2 w
p z
r 2 und w 2 w 1 w p s s = == = + ++ +
ergibt sich durch Addition und Auflsung nach w inv
+ ++ +
+ ++ +
+ ++ +
= == = inv tan
z z
x x
2 inv
2 1
2 1
w (1.30) Gl. 1.30 kann nur iterativ gelst werden
Nach Gl. (1.24) knnen die Wlzkreise berechnet werden
w
1 1 w
cos
cos
r r
= == = und
w
2 2 w
cos
cos
r r
= == = und der Achsabstand
w
d
w
2 1 2 w 1 w
cos
cos
a
cos
cos
) r r ( r r a
= == =
+ ++ + = == = + ++ + = == = (1.31)
In der Regel whlt man die bersetzung i = z
2
/ z
1
und den Modul m und berechnet daraus
den Nullachsabstand a
d
= m (z
1
+z
2
) / 2. Mit der Wahl des Achsabstandes a kann mit Hilfe
der Gl. (1.31) der Betriebseingriffswinkel berechnet werden zu cos
w
= a
d
cos / a. Danach
wird Gl. (1.30) nach x
1
+x
2
umgestellt zu x
1
+ x
2
= (z
1
+z
2
) (inv
w
inv) / (2 tan). Man
erhlt also die Summe der Profilverschiebungsfaktoren, die sinnvoll in x
1
(fr Rad 1) und x
2
(fr Rad 2) aufgeteilt werden mssen. Die Wahl der Gre von x
1
+x
2
ist hauptschlich davon
abhngig, ob eine mglichst
Bild 1.27 V-Getriebe bei
spielfreiem Eingriff
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
18
hohe Tragfhigkeit mit (x
1
+x
2
) 1 (0,7 ...... 1,2) oder eine
gute berdeckung mit (x
1
+x
2
) -0,2 (-0,4 ...... 0) erzielt werden soll.
Beispiel: gewhlt: i = 3,5; m = 2 mm; z
1
= 21; z
2
= 73; a
d
= 94 mm u. i
Ist
= 3,476
gewhlt: a = 96 mm;
w
= 23,075u. x
1
+x
2
= 1,075
Eine Empfehlung fr die Wahl und die Aufteilung von x
1
und x
2
gibt auch DIN3994/3995 mit
der 0,5-Verzahnung, bei der jedes Zahnrad einen konstanten Profilverschiebungsfaktor x
1
=
x
2
= 0,5 erhlt. Der Vorteil der 0,5-Verzahnung liegt in der relativ hohen Tragfhigkeit.
Rad- und Getriebeabmessungen bei V Auenradpaaren
Die Grund- und Teilkreisdurchmesser fr Ritzel und Rad bleiben unverndert.
Teilkreisdurchmesser d = m z (1.32)
Grundkreisdurchmesser d
b
= d cos (1.33)
Fukreisdurchmesser d
f
= d 2 (m + c) + 2 m x (1.34)
Nach dem Zusammenschieben von profilverschobenen
Rdern muss berprft werden, ob noch ausreichendes
Kopfspiel jeweils zwischen den Kopf- und Fukreisen
vorhanden ist und gegebenenfalls mssen die
Kopfkreise nach Bild 1.28 von r`
a
auf r
a
gekrzt werden:
r
a1
= a (r
f2
+ c) und r
a2
= a (r
f1
+ c)
Kopfhhenvernderung k = r
a1
r`
a1
= r
a2
r`
a2
Mit r
f
= r (m+c) + m x und r
a
= r + m + m x wird
k = a (r
f2
+ c) r
a1
0
k = a r
2
+ m + c m x
2
c r
1
m m x
1
Bild 1.28 Kopfspiel
k = a a
d
m (x
1
+ x
2
) 0 (1.35)
Kopfkreisdurchmesser k 2 x m 2 m 2 d da + ++ + + ++ + + ++ + = == = (1.36)
Zahndicke am Teilkreisdurchmesser | || |
| || |
\ \\ \
| || |
+ ++ +
= == = tan x 2
2
m s (1.37)
Zahnlcke am Teilkreisdurchmesser | || |
| || |
\ \\ \
| || |
= == = tan x 2
2
m e (1.38)
Betriebseingriffswinkel
( (( ( ) )) )
( (( ( ) )) )
+ ++ +
+ ++ +
+ ++ +
= == = inv
z z
x x
tan 2 inv
2 1
2 1
w (1.39)
Betriebswlzkreisdurchmesser
w
w
coc
cos
d d
= == = (1.40)
Profilberdeckung
( (( ( ) )) )
+ ++ +
= == =
cos m
sin a d d d d 5 , 0 w 2 b
2
2 a
2
1 b
2
1 a
2
(1.41)
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
19
1.6 Geometrie der Schrgzahnstirnrder
P
r 2
tan
= == = und
P
r 2
tan
b
b
= == = und allg. = == = tan
r
r
tan
y
y
Als Bezugsangabe dient immer der Schrgungswinkel am Teilkreis. Man unterscheidet wie
bei Schrauben rechtssteigende und linkssteigende Rder. Bei der Paarung
auenverzahnter Stirnrder ist immer ein Rad rechts-, das andere linkssteigend, wobei der
Betrag von gleich gro sein muss. Bei schrgverzahnten Stirnrdern sind immer mehrere
Zhne im Eingriff, die Belastung eines Zahnes erfolgt nicht pltzlich ber die ganze
Zahnbreite, sondern allmhlich, und zwar schrg ber die Flankenflche, und die Folgen
davon sind hhere Belastbarkeit und grere Laufruhe. Die Grenzzhnezahl ist niedriger
gegenber gradverzahnten Zahnrdern. Das Auftreten einer zustzlichen Axialkraft kann in
der Regel leicht in den Lagern aufgenommen oder durch Doppelschrgverzahnung bzw.
Pfeilverzahnung ausgeglichen werden. Getriebe mit schrgverzahnten Zahnrdern werden
vorwiegend bei hohen Drehzahlen und groen Belastungen verwendet und werden mit
Schrgungswinkeln von = 10.....30ausgefhrt.
Erzeugende als Linien auf der Wlzebene
beschreiben beim Abrollen der Wlzebene auf
dem Grundzylinder die Flanken schrg
verzahnter Zahnrder. Die Begrenzungslinien
auf dem Grundzylinder (d
b
), Teilzylinder (d)
und Kopfzylinder (d
a
) sind Schraubenlinien,
deren Steigungswinkel natrlich verschieden
sind. Bei Zahnrdern wird allerdings der
Schrgungswinkel gegen die Mantellinie, die
der Drehachse parallel ist, gemessen. Es
ergibt sich aus der Bedingung gleicher
Steigung P folgender Zusammenhang:
Bild 1.29 Entstehung schrgverzahnter
Zahnrder
Bild 1.30 Gren im Stirnschnitt S-S
und Normalschnitt N-N
Damit fr die Herstellung von Gerad- und
Schrgstirnzahnrdern dieselben Werkzeuge
verwendet werden knnen, wird nicht das Profil im
Stirnschnitt (Schnitt senkrecht zur Achse) sondern
im Normalschnitt (Schnitt senkrecht zur
Flankenlinie am Teilkreisdurchmesser) als
Bezugsprofil verwendet. Der Zusammenhang der
Gren im Stirnschnitt (Index t) und im
Normalschnitt (Index n) ist in Bild 1.30
dargestellt. Die Teilung im Stirnschnitt ist danach
grer als die Teilung im Normalschnitt.
Es gilt:
= == = = == =
t
n
t
n
m
m
p
p
cos (1.42)
Demnach ist der Stirnmodul
= == =
cos
m
m
n
t (1.43)
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
20
Nach Bild 1.31 gilt p
n
/ 2 = l
k
tan
n
und p
t
/ 2 = l
k
tan
t
und damit wird nach Gl. (1.42)
t
n
tan
tan
cos
= == = (1.44)
Ersatzgeradverzahnung. Wird ein schrgverzahntes Stirnrad senkrecht zur Flankenlinie
durch den Wlzpunkt C geschnitten (Normalschnitt), so werden alle Kreis im Stirnschnitt
(Teilkreis, Grundkreis, usw.) im Normalschnitt zu Ellipsen (Bild 1.32). Wird der groe
Krmmungsradius durch einen Ersatzkreis d
n
= 2 r
n
ersetzt erhlt man ein virtuelles
Geradstirnrad, das den Verhltnissen einer Geradverzahnung im Normalschnitt entspricht.
Somit knnen alle Gleichungen der Geradverzahnung auf die Schrgverzahnung bertragen
werden. Das Ersatzrad hat dann den Teilkreisdurchmesser d
n
= 2 r
n
= z m
n
. Dieses
Ersatzrad hat bei einer Zhnezahl z des Schrgstirnrades die Ersatzzhnezahl
= == =
= == = = == =
cos cos
z
m cos
d
m
d
z
b
2
n b
2
n
n
n (1.45)
Bei greren Schrgungswinkeln lassen sich erheblich kleinere Grenzzhnezahlen
gegenber der Geradverzahnung realisieren (s. auch Roloff / Matek Bild 21-16).
Sprungberdeckung. Durch den Schraubenfrmigen Verlauf der Flankenlinien sind die
Stirnflchen eines Zahnes um dem sogenannten Sprung U (Bild 1.30) zueinander
versetzt. Der Sprung berechnet sich zu g
= b tan
. Dadurch entsteht eine zustzliche
berdeckung, die Sprungberdeckung
, die als das Verhltnis von Sprung U zur
Stirnteilung definiert ist:
= == =
= == = = == =
n n t m
sin b
p
cos tan b
p
U
(1.46)
Die Gesamtberdeckung ist dann die Summe aus Profil- und Sprungberdeckung.
Bild 1.31 Zusammenhang der Gren im
Stirnschnitt und im Normalschnitt
Bild 1.32 Ersatzgeradverzahnung
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
21
Mit den Bezeichnungen im Stirnschnitt knnen weitgehend die Gleichungen der
Geradverzahnung bernommen werden.
Geometrie der Schrgverzahnung Grundlegende Berechnungsgleichungen.
Winkelbeziehungen
t
n
m
m
cos = == = (1.47)
t
n
tan
tan
cos
= == = (1.48) t b cos tan tan = == = (1.49)
n b cos sin sin = == = (1.50)
t
n
b
sin
sin
cos
= == = (1.51)
d
d
tan tan
w
w = == = (1.52)
Geometrie
= == =
cos
z m
d
n
(1.53)
2
d d
a
2 1
d
+ ++ +
= == = (1.54) t
d
wt cos
a
a
cos = == = (1.55)
) z z (
2 tan
inv inv
x x 2 1
n
t wt
2 1 + ++ +
= == = + ++ + (1.56)
100
z z
lg
u lg
)
2
x x
5 , 0 (
2
x x
x
2 1
2 1 2 1
1
+ ++ +
+ ++ +
+ ++ +
(1.57)
Die endgltige Wahl von x1 und x2 erfolgt nach verschienen Kriterien nach DIN 3992
wt
t
b
cos
cos
d d
= == = (1.58)
wt
t
w
cos
cos
d d
= == = (1.59)
2
d d
a
2 w 1 w + ++ +
= == = (1.60)
k 2 x m 2 m 2 d d n n a + ++ + + ++ + + ++ + = == = (1.61) ) x x ( m a a k 2 1 n d + ++ + = == = (1.62)
c 2 d a 2 d 2 a 1 f = == = (1.63) c 2 d a 2 d 1 a 2 f = == = (1.64)
2
d d
h
f a
= == =
2
d d
h
a
a
= == =
2
d d
h
f
f
= == = (1.65)
berdeckungsgrad
et p
g
= == = ( (( ( ) )) ) wt 2 b
2
2 a
2
1 b
2
1 a
2
sin a d d d d 5 , 0 g + ++ + = == = (1.66)
t n et cos m p = == = (1.67)
n m
sin b
= == = (1.68) + ++ + = == = = == = g (1.69)
Zahndicke am Teil- und Kopfkreis
| || |
| || |
\ \\ \
| || |
+ ++ +
= == = n
n
t tan x 2
2 cos
m
s (1.70) | || |
| || |
\ \\ \
| || |
+ ++ + = == = at t
t
a at inv inv
d
s
d s (1.71)
t
a
at cos
d
d
cos = == = (1.72)
at
t
a
cos
cos
tan tan
= == = (1.73) a at an cos s s = == = (1.74)
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
22
1.7 Berechnungsbeispiel
KISSsoft/Hirnware Rel. 10-2003
KISSsoft - Hochschulversion (Einzelplatz)
Dateiname : C:/Dokumente und Einstellungen/Stenkamp/LehreFH/Konstruktion/Rolof711a1.Z12
Projekt : Konstruktion 1
Datum: 22.08.2006/08:30:11 Anwender: Prof. Dr. W. Stenkamp
Beschreibung : Roloff S. 711 Komm.Nr: WS 2006/2007
Wichtiger Hinweis: Bei der Berechnung sind Warnungen aufgetreten:
1-> Hinweis zu Rad 1:
Rollenmass ist nicht messbar!
2-> Hinweis zu Rad 2:
Rollenmass ist nicht messbar!
STIRNRAD-BERECHNUNG (STIRNRAD-PAAR)
Zeichnungs- oder Artikelnummer:
Rad 1: 0.000.0
Rad 2: 0.000.0
Rechenmethode ISO 6336 Methode B (1996), YF Methode C
------- RAD 1 --------- RAD 2 --
Nennleistung (kW) [P] 22.000
Drehzahl (1/min) [n] 1400.0 1358.8
Drehmoment (Nm) [T] 150.1 154.6
Anwendungsfaktor [KA] 1.25
Lebensdauer in Stunden [H] 59.52
Rad treibend (+) / getrieben (-) + -
1. ZAHNGEOMETRIE UND WERKSTOFF
(Geometrieberechnung nach DIN 3960)
------- RAD 1 --------- RAD 2 --
Achsabstand (mm) [a] 74.000
Achsabstands-Toleranz ISO 286 Abmass js7
Normalmodul (mm) [mn] 2.0000
Eingriffswinkel im Normalschnitt () [alfn] 20.0000
Schrgungswinkel am Teilkreis () [beta] 24.0000
Zhnezahl [z] 33 34
Zahnbreite (mm) [b] 17.50 16.50
Schrgungsrichtung Links
Rechts
Verzahnungsqualitt [Q-ISO1328] 6 6
Innendurchmesser Ring (mm) [dRing] 0.00 0.00
Innendurchmesser Radkrper (mm) [di] 0.00 0.00
Werkstoff(Eigene Eingabe) 16 MnCr 5 (1) 16 MnCr 5 (1)
Einsatzstahl Einsatzstahl
einsatzgehrtet einsatzgehrtet
Oberflchen-Hrte HRC 59 HRC 59
Werkstoff-Behandlung nach ISO6336: ML (normal)
Dauerfestigk. Zahnfussspannung (N/mm) [sigFlim] 450.00 450.00
Dauerfestig. Hertzsche Pressung (N/mm) [sigHlim] 1450.00 1450.00
Streckgrenze (N/mm) [Rp] 635.00 695.00
Elastizittsmodul (N/mm) [E] 206000 206000
Poisson-Zahl [ny] 0.300 0.300
Gemittelte Rauhtiefe Rz, Flanke (m) [RZH] 4.00 4.00
Gemittelte Rauhtiefe Rz, Fuss (m) [RZF] 20.00 20.00
Fusshhe Bezugsprofil (in Modul) [hfP*] 1.250 1.250
Fussradius Bezugsprofil (in Modul) [rofP*] 0.380 0.380
Kopfhhe Bezugsprofil (in Modul) [haP*] 1.000 1.000
Protuberanz-Hhe (in Modul) [hk*] 0.000 0.000
Protuberanz-Winkel () [alfPro] 0.000 0.000
Hhe Knickfussflanke (in Modul) [hko*] 0.000 0.000
Winkel Knickfussflanke () [alfnk] 0.000 0.000
Art der Profilkorrektur: Keine
Kopfrcknahme (m) (durch Einlaufen) [Ca] 2 2
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
23
Schmierungsart l-Tauchschmierung
lsorte l: EP-220
Schmierstoff-Basis Minerall-Basis
Kinem. Nennvisko. l bei 40 Grad (mm/s) [nu40] 210.00
Kinem. Nennvisko. l bei 100 Grad (mm/s) [nu100] 17.50
FZG-Test A/8.3/90 Stufe [FZGtestA] 12
Spez. Dichte bei 15 Grad (kg/dm) [roOil] 0.895
ltemperatur (C) [theOil] 40.000
Umgebungstemperatur (C) [theUmg] 20.000
------- RAD 1 --------- RAD 2 --
Gesamtbersetzung [itot] -1.030
Zhnezahlverhltnis [u] 1.030
Stirnmodul (mm) [mt] 2.189
Eingriffswinkel am Teilkreis () [alft] 21.723
Betriebseingriffswinkel () [alfwt] 22.971
[alfwt.e/i] 22.998 / 22.943
Grundschrgungswinkel () [betab] 22.470
Nullachsabstand (mm) [ad] 73.341
Summe der Profilverschiebung [Summexi] 0.3388
Profilverschiebungsfaktor [x] 0.1700 0.1688
Zahndicke (Bogen) im Teilkreis (in Modul)[sn*] 1.6945 1.6937
Zahndicke (Bogen) im Teilkreis (mm) [sn] 3.389 3.387
(mm) [sn.e/i] 3.264 / 3.204 3.262 / 3.202
Kopfhhennderung (mm) [k*mn] -0.018 -0.018
Teilkreisdurchmesser (mm) [d] 72.246 74.435
Grundkreisdurchmesser (mm) [dB] 67.115 69.149
Kopfkreisdurchmesser (mm) [da] 76.890 79.074
(mm) [da.e/i] 76.890 / 76.880 79.074 / 79.064
Abmasse Kopfkreis (mm) [Ada.e/i] 0.000 / -0.010 0.000 / -0.010
Kopf-Kantenbruch / Kopfrundung (mm) [Fased] 0.000 0.000
Kopf-Nutzkreisdurchmesser (mm) [dNa.e/i] 76.890 / 76.880 79.074 / 79.064
Wlzkreisdurchmesser (mm) [dw] 72.896 75.104
(mm) [dw.e/i] 72.910 / 72.881 75.120 / 75.089
Fusskreisdurchmesser (mm) [df] 67.926 70.110
Erzeugungsprofilverschiebung [xE.e/i] 0.0841 / 0.0429 0.0829 / 0.0417
Erzeugter Fusskreis mit xE (mm) [df.e/i] 67.583 / 67.418 69.767 / 69.602
Kopfspiel theoretisch (mm) [c] 0.500 0.500
Kopfspiel effektiv (mm) [c.e/i] 0.774 / 0.657 0.774 / 0.657
Notwendiger Fuss-Nutzkreisdurchmesser (mm)[dNf] 69.864 72.050
(mm)[dNf.e/i] 69.891 / 69.842 72.078 / 72.029
Hergestellter Fussnutzkreis (Formkreis) (mm) [dNf0] 69.428 71.598
(mm)[dNf0.e/i] 69.196 / 69.089 71.363 / 71.255
Reserve (dNf-dNf0)/2 (mm) [rNf-rNf0.e/i] 0.401 / 0.323 0.412 / 0.333
Addendum (mm) [ha] 2.322 2.320
(mm) [ha.e/i] 2.322 / 2.317 2.320 / 2.315
Dedendum (mm) [hf] 2.160 2.162
(mm) [hf.e/i] 2.332 / 2.414 2.334 / 2.417
Profilwinkel zu dNa () [alf_dNa_t.e/i] 29.206 / 29.192 29.016 / 29.003
Profilwinkel zu dNf0 () [alf_dNf0_t.e/i] 14.087 / 13.729 14.310 / 13.963
Zahnhhe (mm) [H] 4.482 4.482
Ersatz-Zhnezahl [zn] 42.303 43.585
Normal-Zahndicke am Kopfzylinder (mm) [san] 1.484 1.490
(mm) [san.e/i] 1.352 / 1.294 1.358 / 1.300
Normal-Lckenweite am Fusszylinder (mm) [efn] 1.618 1.606
(mm) [efn.e/i] 1.685 / 1.722 1.670 / 1.705
Max. Gleitgeschwindigkeit am Kopf (m/s) [vga] 1.310 1.307
Spezifisches Gleiten am Kopf [zetaa] 0.476 0.479
Spezifisches Gleiten am Fuss [zetaf] -0.919 -0.910
Gleitfaktor am Kopf [Kga] 0.245 0.245
Gleitfaktor am Fuss [Kgf] -0.245 -0.245
Teilkreisteilung (mm) [pt] 6.878
Grundkreisteilung (mm) [pbt] 6.389
Stirneingriffsteilung (mm) [pet] 6.389
Axiale Teilung (mm) [px] 15.448
Lnge der Eingriffsstrecke (mm) [ga] 9.058
(mm) [ga.e/i] 9.096 / 8.999
Lnge T1-A (mm) [T1A] 9.701
Lnge T1-B (mm) [T1B] 12.370
Lnge T1-C (mm) [T1C] 14.224
Lnge T1-D (mm) [T1D] 16.091
Lnge T1-E (mm) [T1E] 18.759
Profilberdeckung [eps_a] 1.418
Profilberdeckung mit Abmassen [eps_a.e/i] 1.424 / 1.408
Sprungberdeckung [eps_b] 1.068
Gesamtberdeckung [eps_g] 2.486
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
24
Gesamtberdeckung mit Abmassen [eps_g.e/i] 2.492 / 2.477
2. ALLGEMEINE EINFLUSSFAKTOREN
------- RAD 1 --------- RAD 2 --
Nennumfangskraft im Teilkreis (N) [Ft] 4154.2
Axialkraft (N) [Fa] 1849.5
Radialkraft (N) [Fr] 1655.1
Normalkraft (N) [Fnorm] 4839.1
Nennumfangskraft Teilk. pro mm (N/mm) [w] 251.77
Nur zur Information: Krfte im Wlzkreis:
Nennumfangskraft (N) [Ftw] 4117.1
Axialkraft (N) [Faw] 1833.1
Radialkraft (N) [Frw] 1640.3
Normalkraft (N) [Fnormw] 4796.0
Umfangsgeschwindigkeit Teilk. (m/sec) [v] 5.30
Einlaufbetrag y.a (m) [ya] 0.5
Korrekturfaktor CM [CM] 0.80
Radkrperfaktor CR [CR] 1.00
Bezugsprofilfaktor CBS [CBS] 0.98
Einzelfedersteifigkeit (N/mm/m) [c'] 13.143
Eingriffsfedersteifigkeit (N/mm/m) [cg] 17.259
Reduzierte Masse (kg/mm) [mRed] 0.010
Resonanzdrehzahl (min-1) [nE1] 12232
Bezugsdrehzahl (-) [N] 0.114
Unterkritischer Bereich
Lagerdistanz l der Ritzelwelle (mm) [l] 150.000
Distanz s der Ritzelwelle (mm) [S] 30.000
Aussendurchmesser der Ritzelwelle (mm) [dsh] 60.000
Belastung nach ISO 6336/1 Bild 16 [-] 0
Faktor K' nach ISO 6336/1 Bild 16 [K'] 0.48
0:a), 1:b), 2:c), 3:d), 4:e)
Mit Sttzwirkung
Flankenlinienabweichung wirksame (m) [Fby] 7.62
von Verformung der Wellen (m) [fsh] 0.73
Zahn ohne Flankenlinien-Korrektur
Lage des Tragbildes : ohne Nachweis oder ungnstig
von Fertigungstoleranzen (m) [fma] 8.00
Einlaufbetrag y.b (m) [yb] 1.34
Dynamikfaktor [KV] 1.03
Breitenfaktoren - Flanke [KHb] 1.20
- Zahnfuss [KFb] 1.15
- Fressen [KBb] 1.20
Stirnfaktoren - Flanke [KHa] 1.03
- Zahnfuss [KFa] 1.03
- Fressen [KBa] 1.03
Schrgungsfaktor Fressen [Kbg] 1.22
Anzahl der Lastwechsel (in Mio.) [NL] 5.000 4.853
3. ZAHNFUSS-TRAGFHIGKEIT
------- RAD 1 --------- RAD 2 --
Rechnung der Zahnformfaktoren nach Methode: C
(Zahnformfaktoren werden bei Abmassen > 0.05*mn mit Herstellprofilverschiebung xE.e berechnet)
Zahnformfaktor [YF] 2.43 2.42
Spannungskorrekturfaktor [YS] 1.69 1.69
Biegehebelarm (mm) [hF] 3.98 3.98
Kraftangriffswinkel () [alfen] 26.16 26.00
Zahnfussdicke (mm) [sFn] 4.34 4.35
Zahnfussradius (mm) [roF] 1.00 1.00
berdeckungsfaktor [Yeps] 0.702
Schrgungsfaktor [Ybet] 0.800
Massgebende Zahnbreite (mm) [beff] 17.50 16.50
rtliche Zahnfuss-Spannung (N/mm) [sigF0] 273.53 289.82
(Effektive) Zahnfuss-Spannung (N/mm) [sigF] 413.49 438.12
Zulssige Zahnfussspannung von Prf-Zahnrad
Sttzziffer [YdrelT] 0.997 0.997
Oberflchenfaktor [YRrelT] 0.957 0.957
Grssenfaktor (Zahnfuss) [YX] 1.000 1.000
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
25
Zeitfestigkeits-Faktor [YNT] 0.990 0.990
Wechselbiegungs-Faktor [Kwb] 1.000 1.000
Spannungs-Korrekturfaktor [Yst] 2.00
Zulssige Zahnfuss-Spannung (N/mm) [sigFG] 849.47 850.07
([sigFP] = [sigFG] / [SFmin]) (N/mm) [sigFP] 606.77 607.20
Soll-Sicherheit [SFmin] 1.40 1.40
bertragbare Leistung (kW) [kWRating] 32.28 30.49
Sicherheitsfaktor fr Zahnfussspannung [SF=sigFG/sigF] 2.05 1.94
4. FLANKENSICHERHEIT
------- RAD 1 --------- RAD 2 --
Zonenfaktor [ZH] 2.248
Elastizittsfaktor (N^.5/mm) [ZE] 189.812
berdeckungsfaktor [Zeps] 0.840
Schrgenfaktor [Zbet] 0.956
Massgebende Zahnbreite (mm) [beff] 16.50
Nennwert der Flankenpressung (N/mm) [sigH0] 897.52
Flankenpressung am Wlzkreis (N/mm) [sigH] 1130.03
Schmierstoff-Faktor [ZL] 1.010 1.010
Geschwindigkeits-Faktor [ZV] 0.990 0.990
Rauhigkeitsfaktor [ZR] 0.980 0.980
Werkstoffpaarungs-Faktor [ZW] 1.000 1.000
Zeitfestigkeits-Faktor [ZNT] 1.190 1.193
Kleine Anzahl Grbchen zulssig (0=nein, 1=ja) 0 0
Grssenfaktor (Flanke) [ZX] 1.000 1.000
Zulssige Flankenpressung (N/mm) [sigHG] 1691.51 1695.59
([sigHP] = [sigHG] / [SHmin]) (N/mm) [sigHP] 1691.51 1695.59
Sicherheit fr Flankenpressung Wlzkreis[SHw] 1.50 1.50
Einzeleingriffs-Faktor [ZBD] 1.00 1.00
Flankenpressung Einzeleingr.pkt (N/mm) [sigHBD] 1130.03 1130.03
Soll-Sicherheit [SHmin] 1.00 1.00
bertragbare Leistung (kW) [kWRating] 49.29 49.53
Sicherheit fr Pressung Einzeleingriff [SH=sigHG/sigHBD] 1.50 1.50
5. FRESSTRAGFHIGKEIT
Rechenmethode nach DIN3990
Schmierfaktor (Fressen) [XS] 1.000
Relativer Gefgefaktor (Fressen) [XWrelT] 1.000
Winkelfaktor [Xalfbet] 1.004
Therm. Kontaktkoeffizient (N/mm/s^.5/K) [BM] 13.795 13.795
Mittenrauhwert Ra, Zahnflanke (m) [RAH] 0.48 0.48
Massgebende Umfangskraft/Zahnbreite [wbt] 487.325
Blitztemperatur-Kriterium
Massentemperatur (C) [them] 51.022
Fresstemperatur (C) [thes] 409.361
Koordinate Gamma (Ort der hchsten Temp.) [Gamma] -0.130
Hchste Kontakttemp. (C) [theB] 74.475
Blitzfaktor [XM] 50.002
Geometriefaktor [XB] 0.093
Aufteilungsfaktor [XGam] 1.000
Reibungszahl [mymy] 0.061
Soll-Sicherheit [SBmin] 2.000
Sicherheitsfaktor fr Fressen (Blitz-T.) [SB] 10.711
Integraltemperatur-Kriterium
Massentemperatur (C) [theMC] 50.759
Fress-Integraltemperatur (C) [theSint] 409.361
Blitzfaktor [XM] 50.002
berdeckungsfaktor [XE] 0.303
Gemittelte Reibungszahl [mym] 0.053
Geometriefaktor [XBE] 0.234
Eingriffsfaktor [XQ] 1.000
Kopfrcknahmefaktor [XCa] 1.009
Integral-Flankentemperatur (C) [theint] 73.815
Soll-Sicherheit [SSmin] 1.80
Sicherheitsfaktor fr Fressen (Int.-T.) [SSint] 5.55
Sicherh. f. bertragenes Moment (Int.-T.) [SSL] 10.92
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
26
6. PRFMASSE FR DIE ZAHNDICKE
------- RAD 1 --------- RAD 2
Zahndicken-Toleranz DIN3967 b26 DIN3967 b26
Zahndickenabmass im Normalschnitt (mm) [As.e/i] -0.125 / -0.185 -0.125 / -0.185
Messzhnezahl [k] 5.000 6.000
Messkreisdurchmesser (mm) [dMWk] 71.929 75.928
Zahnweite spielfrei (mm) [Wk] 27.997 33.936
Effektive Zahnweite (mm) [Wk.e/i] 27.880 / 27.823 33.819 / 33.762
Theor. Messkrper-Durchmesser (mm) [DM] 3.451 3.447
Eff. Messkrper-Durchmesser (mm) [DMeff] 3.500 3.500
Messkreisdurchmesser (mm) [dMMr] 73.017 75.210
Radiales Einkugel-Mass spielfrei (mm) [MrK] 38.925 40.020
Eff. radiales Einkugel-Mass (mm) [MrK.e/i] 38.776 / 38.703 39.870 / 39.797
Diametrales Zweikugel-Mass spielfrei (mm)[MdK] 77.766 80.039
Eff. diametrales Zweikugel-Mass (mm) [MdK.e/i] 77.468 / 77.323 79.740 / 79.595
Eff. diametrales Rollen-Mass (mm) [MdR.e/i] 77.552 / 77.407 79.740 / 79.595
Effektives Dreirollen-Mass (mm) [Md3K.e/i] 77.552 / 77.407 0.000 / 0.000
Zahndickensehne spielfrei (mm) [smn] 3.388 3.386
Effektive Zahndickensehne (mm) [smn.e/i] 3.263 / 3.203 3.261 / 3.201
Hhe ber der Sehne (mm) [ha] 2.355 2.352
Spielfreier Achsabstand (mm) [aControl.e/i] 73.705 / 73.564
Spielfreier Achsabstand, Abmasse (mm) [jta] -0.295 / -0.436
Achsabstands-Abmass (mm) [Aa.e/i] 0.015 / -0.015
Drehflankenspiel aus Aa [jt-Aa.e/i] 0.012 / -0.012
Drehflankenspiel (Stirnschnitt) (mm) [jt] 0.419 / 0.260
Normalflankenspiel (mm) [jn] 0.360 / 0.223
7. TOLERANZEN
------- RAD 1 --------- RAD 2 --
Nach ISO 1328:
Verzahnungsqualitt [Q-ISO1328] 6 6
Eingriffsteilungsabweichung (m) [fpb] 7.0 7.0
Profil-Formabweichung (m) [ffa] 6.0 6.0
Profil-Winkelabweichung (m) [fHa] 5.5 5.5
Profil-Gesamtabweichung (m) [Fa] 8.0 8.0
Flankenlinien-Formabweichung (m) [ffb] 8.0 8.0
Flankenlinien-Winkelabweichung (m) [fHb] 8.0 8.0
Flankenlinien-Gesamtabweichung (m) [Fb] 11.0 11.0
Teilungs-Gesamtabweichung (m) [Fp] 26.0 26.0
Rundlaufabweichung (m) [Fr] 21.0 21.0
Zweiflanken-Wlzabweichung (m) [Fi"] 31.0 31.0
Zweiflanken-Wlzsprung (m) [fi"] 9.0 9.0
Einflanken-Wlzabweichung (m) [Fi'] 37.0 37.0
Einflanken-Wlzsprung (m) [fi'] 11.0 11.0
8. ERGNZENDE DATEN
Maximal mglicher Achsabstand (eps_a=1.0)[aMAX] 75.082
Verdrehsteifigkeit (MNm/rad) [cr] 0.3 0.4
Mittlere Reibungszahl (nach Niemann) [mum] 0.060
Verschleissgleiten nach Niemann [zetw] 0.677
Zahnverlustleistung aus Zahnbelastung (kW) [PVZ] 0.158
Trgheitsmoment (System bezogen auf Rad 1):
Berechnung ohne Bercksichtigung der exakten Zahnform
Rder einzeln (da...di) (kgm) [TraeghMom] 0.0001167 0.0001239
System (da...di) (kgm) [TraeghMom] 0.0002334
Bemerkungen:
- Beim Flankenspiel werden die Achsabstandstoleranzen und die Zahndickenabmasse
bercksichtigt. Angegeben wird das maximale und das minimale Spiel entsprechend
den grssten, beziehungsweise kleinsten Abmassen.
- Details zur Rechenmethode:
cg nach Methode B
KV nach Methode B
KHb, KFb nach Methode C2
KHa, KFa nach Methode B
Ende Report Zeilen : 369
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
27
1.8 Entwurfsberechnung
Fr die Auslegung und Gestaltung von Zahnradgetrieben sind viele Gesichtspunkte zu
beachten und erfordern umfangreiche Erfahrungen.
1. Randbedingungen. Die geometrischen und allgemeinen Anforderungen,
insbesondere auch Kundenspezifische Wnsche und Forderungen, werden in einer
Anforderungsliste (Pflichtenheft festgelegt).
2. bersetzungen. In der Regel werden bei Zahnradgetrieben folgende bersetzungen
realisiert:
- einstufiges Getriebe i 6 (8)
- zweistufiges Getriebe i 35 (45) Erfahrungswert i
1/2
0,7 i
0,7
- dreistufiges Getriebe i 150 (200) Erfahrungswert i
1/2
0,55 i
0,55
u. i
3/4
i
0,32
Aus Funktionsgrnden soll die Zhnezahl des Rades kein ganzzahliges
vielfaches des Ritzels sein, da sonst die gleichen Zahnpaare periodisch zum
Eingriff kommen.
3. berschlgige Wellenberechnung. Die Berechnung erfolgt in der Regel
zunchst mit dem Torsionsmoment. Wegen der Vernachlssigung der
Biegebeanspruchung sollte der Entwurfsdurchmesser um ca. 20 % grer
gewhlt werden.
5. Modul. Die Zahnfutragfhigkeit ist bei Leistungsgetrieben magebend.
Fs
lim F 1 1
F A
n Y
b d
s K T
m
> >> >
Flim
Zahnfu-Biegenenndauerfestigkeit der Prfrder z.B. fr Einsatzstahl aus
16MnCr5 oder 20MnCr5.
Flim
= 450 N/mm
2
bei Schwellbelastung
Flim
= 315 N/mm
2
bei Wechselbelastung
Mindestfestigkeitswerte sollten bei Materialbestellung mit dem Lieferanten
festgelegt werden. Bei der Festlegung von d
1
, b
1
und m Erfahrungswerte nach
TB 21-14 beachten.
6. Zhnezahlen = == = cos
m
d
z
n
1
1 2 / 1 1 2 i z z = == =
7. Nullachsabstand
2
) z z ( m
a
2 1 n
d
+ ++ +
= == = z.B. a > a
d
whlen um x > 0 zu erhalten.
4. Ritzelgestaltung. Der kleinst-
mgliche Ritzelteilkreisdurch-
messer d
1
ergibt sich aus der
Entwurfsberechnung der Welle.
a) Ritzelwelle
d
1
(1,2....1,4) d
w
b) Ritzel
d
1
(2,0....2,5) d
w
Bild 1.33 Ritzelgestaltung
s
F
Zahnfusicherheit nach Vorgabe
Y
Fs
4 Kopffaktor aus Erfahrung
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
28
Mit den vorgenannten Entwurfswerten erfolgt die endgltige Auslegung rechnergesttzt.
Nach der ersten Entwurfsberechnung aller Getriebestufen sollte eine mastbliche
Entwurfsskizze angefertigt werden um z.B. minimale Baugre anzustreben oder aber
vorgegebene Einbaubedingungen zu erfllen. In der Skizze sind die Dreh-, Steigungs- und
Kraftrichtungen jeweils fr Ritzel und Rad einzutragen. Aus Lage und Gre der Nenn-
Umfangskrfte kann die Lagerlebensdauer der Getriebelager nherungsweise bestimmt
werden. Aus der Betriebsweise des gesamten Antriebssystems, die sich aus der gestellten
Aufgabe ergibt, kann eine Betriebsfestigkeitsberechnung ggf. notwendig werden.
Belastungshhe und Belastungshufigkeit bei Beschleunigungs- und Bremsvorgngen,
Einschaltdauer und die geforderte Betriebsstundenzahl beeinflussen dann ganz
entscheidend die Auslegung des Getriebes.
1.13 Gestaltung von Getrieben - Beispiele
Bild 1.34-1 Einstufig Bild 1.34-2 Zweistufig Bild 1.34-3 Sammel - und
Verteilergetriebe
Bild 1.35 An- und Abtriebswelle koaxial angeordnet (Drehelastische Wellen A im Beispiel b;
ferner muss sich mindestens ein Rad so verstellen lassen, dass alle in Kraftrichtung liegende
Zahnflanken anliegen).
Bild 1.36 Zahnradgetriebe-Kombinationen
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
29
Bild 1.37 Industriegetriebe, Gehuse geteilt, alternativ als Stand- oder Aufsteckgetriebe und
weitere Ausfhrungsvarianten.
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
30
Bild 1.38 Getriebemotor
Bild 1.39 Stirnradgetriebe, koaxial mit
geschweiten Grordern
Bild 1.40 Grundformen geschweiter
Zahnrder fr Schrgverzahnung
a) Fr vergtete Verzahnung
b)c) Fr gehrtete Verzahnung
d) Schraubverbindung
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
31
Bild 1.41 Grundformen von Ritzeln und Zahnrdern aus gewalzten oder
geschmiedeten Rohlingen
Bild 1.42 Schneckengetriebe
Die Hauptbelastung an der Schneckenwelle ist axial gerichtet, wobei die Lastrichtung mit
dem Drehsinn der Welle wechselt. Das Schneckengetriebe wird mit l durch
Tauchschmierung geschmiert. Der lstand soll hierbei bis zum Teilkreis der Schnecke
reichen. Die Radialwellendichtringe an den Wellendurchgngen verhindern den laustritt
und bieten hinreichenden Schutz gegen das Eindringen von Verunreinigungen.
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
32
Bild 1.43 Schnecken-Planetengetriebe
Mit Planetengetrieben werden auf kleinstem Raum hohe Leistungen und groe
Drehmomente bertragen. Wegen der begrenzten Raumverhltnisse in Planetengetrieben
ergeben Nadellager mit Nadelhlsen besonders gnstige Lsungen.
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
33
Die hintereinander angeordneten Planetenradstze kmmen mit dem Sonnenritzel und den
innenverzahnten Hohlrdern gleichen Durchmessers. Die Sonnenritzel zentrieren sich durch
das in den Zahnkupplungen vorhandene Spiel selbstttig. Dadurch wird das zu bertragene
Drehmoment nahezu gleichmig auf die Planetenrder bertragen.
Bild 1.44 Kegelstirnradgetriebe
Bild 1.45 Norm-Planetengetriebe
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
34
Bild 1.47 Hybridantrieb
Bild 1.46 Antriebskomponenten fr
Windenergieanlagen
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
35
Bild 1.48 Krfte an
Kegelrdern
Bild 1.49 Schleifen
von Kegelrdern
Vorlesungsergnzung Konstruktion I Thema: Zahnrder und Zahnradgetriebe
36
Bild 1.50 Kosten-, Gewichts- und Baugrenvergleich an einem einstufigen Zahnradgetriebe
You might also like
- Messen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3From EverandMessen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3Rating: 5 out of 5 stars5/5 (1)
- Zahnradgetriebe PDFDocument146 pagesZahnradgetriebe PDFHectorDavidPreciadoValenzuelaNo ratings yet
- Eine Hybride von Drehkolbenmotor und Turbine mit riesigem SynergieeffektFrom EverandEine Hybride von Drehkolbenmotor und Turbine mit riesigem SynergieeffektNo ratings yet
- Boellhoff Technik Rund Um SchraubenDocument112 pagesBoellhoff Technik Rund Um SchraubenM MNo ratings yet
- Formelsammlung TM1Document10 pagesFormelsammlung TM1m_glembo100% (1)
- Mbn-Konstruktionsrichtlinie 145Document4 pagesMbn-Konstruktionsrichtlinie 145kappo14No ratings yet
- Dreiwellen-Getriebe: Die Kurze Art, Sechsgang-Getriebe Zu BauenDocument8 pagesDreiwellen-Getriebe: Die Kurze Art, Sechsgang-Getriebe Zu Bauenxiaochi1989No ratings yet
- Roloff Matek Maschinenelemente FormelsammlungDocument317 pagesRoloff Matek Maschinenelemente FormelsammlungLajos PuskásNo ratings yet
- Festigkeitsberechnung Von Wellen Und AchsenDocument8 pagesFestigkeitsberechnung Von Wellen Und AchsenmgualdiNo ratings yet
- WS3 PS1 WellendimensionierungDocument8 pagesWS3 PS1 Wellendimensionierunggustrossi100% (1)
- Konstruktion I-II Lsungen H2008Document8 pagesKonstruktion I-II Lsungen H2008quaho100% (1)
- KMK Maschbau 2004 WiSe14-15 - HannoverDocument66 pagesKMK Maschbau 2004 WiSe14-15 - HannoverLaura FonsecaNo ratings yet
- AluminiumwerkstoffeDocument86 pagesAluminiumwerkstoffejorogoraNo ratings yet
- Skriptzusammenfassung Maschinenelemente+CopyrightDocument35 pagesSkriptzusammenfassung Maschinenelemente+Copyrightjozzart100% (1)
- KIT Maschinenbau BA MADocument44 pagesKIT Maschinenbau BA MAAaditya PrasadNo ratings yet
- MAKO Schraubenverbindungen AufgabenDocument10 pagesMAKO Schraubenverbindungen AufgabenbennyfergusonNo ratings yet
- MAE1 02 Festigkeitsberechnung PDFDocument151 pagesMAE1 02 Festigkeitsberechnung PDF032009100% (1)
- Manual DDocument1,022 pagesManual DBùi Văn HợpNo ratings yet
- FischDocument5 pagesFischManelito AlvaradoNo ratings yet
- 4 ReibschlussverbindungenDocument8 pages4 ReibschlussverbindungenCătălina StoicanNo ratings yet
- Welle Nabe VerbindungDocument3 pagesWelle Nabe VerbindungmarcobaumannNo ratings yet
- TechnischeMechanik FormelnDocument17 pagesTechnischeMechanik FormelnArnel DžinićNo ratings yet
- Skript - Maschinendynamik - Kapitel 2Document35 pagesSkript - Maschinendynamik - Kapitel 2marburg1984No ratings yet
- Mdesign GearDocument18 pagesMdesign GearAndreiNo ratings yet
- Technisches Englisch - Ein Leitfaden Für Ingenieure, Techniker Und Fachübersetzer. Mit Beispielen Und Übungen Aus Dem Maschinen - Und ApparatebauDocument151 pagesTechnisches Englisch - Ein Leitfaden Für Ingenieure, Techniker Und Fachübersetzer. Mit Beispielen Und Übungen Aus Dem Maschinen - Und ApparatebauOdin Tachón100% (1)
- Schraubenberechnung Nach VDI 2230Document5 pagesSchraubenberechnung Nach VDI 2230bennyfergusonNo ratings yet
- Technische Mechanik 1 Bis 3Document253 pagesTechnische Mechanik 1 Bis 3Mohamed MahjoubiNo ratings yet
- MSc-Maschinenbau-Modulhandbuch Stand Gueltig Ab 20141001Document939 pagesMSc-Maschinenbau-Modulhandbuch Stand Gueltig Ab 20141001BVBGullyNo ratings yet
- KonstruktionslehreDocument17 pagesKonstruktionslehreFadley Abdullah100% (1)
- Festigkeit s213-240Document14 pagesFestigkeit s213-240Rafael ArndtNo ratings yet
- 3539 PDFDocument26 pages3539 PDFyraju88No ratings yet
- Zeichnungsnormen 41415-6 - BautechnikDocument20 pagesZeichnungsnormen 41415-6 - BautechnikEschtzNo ratings yet
- WKC Grundlagen Der MetallkundeDocument22 pagesWKC Grundlagen Der MetallkundeYunusNo ratings yet
- VDI 2230 Nachrechung KISSsoft 2002Document20 pagesVDI 2230 Nachrechung KISSsoft 2002Ibrahim Rebhi AlzoubiNo ratings yet
- 06 0 Achsen Und Wellen UebungsserieDocument11 pages06 0 Achsen Und Wellen Uebungsserieigualdi53No ratings yet
- Klausurfragen TFVDocument87 pagesKlausurfragen TFVAlexandru IonNo ratings yet
- Aufgabe7 4 1Document3 pagesAufgabe7 4 1Ciolkovski100% (1)
- Trennen (Zerteilen Spanen Abtragen Thermisches Schneiden)Document152 pagesTrennen (Zerteilen Spanen Abtragen Thermisches Schneiden)api-26236715100% (4)
- Praktikum BiegenDocument6 pagesPraktikum Biegenprevrtljivac100% (1)
- 2TechMech FestigkeitslehreDocument37 pages2TechMech FestigkeitslehreAndrea Kahm100% (1)
- Maschinenbautechnik Prueferkatalog PDFDocument95 pagesMaschinenbautechnik Prueferkatalog PDFHussein JomaaNo ratings yet
- Zulässige Spannungen Für Achsen Und WellenDocument1 pageZulässige Spannungen Für Achsen Und Wellensalkan_rahmanovic810100% (1)
- Rechenuebungen Zu FestigkeitslehreDocument116 pagesRechenuebungen Zu FestigkeitslehreJasminNo ratings yet
- WaelzlagerDocument31 pagesWaelzlageraloisar3116No ratings yet
- MaschinenbauDocument20 pagesMaschinenbauheimogoedlNo ratings yet
- Spur Gear, Gear Rack LaurentiuDocument18 pagesSpur Gear, Gear Rack LaurentiuDănceanu LaurențiuNo ratings yet
- Abschlusselemente DruckbehälterDocument75 pagesAbschlusselemente DruckbehälterJEELE77No ratings yet
- Studienarbeit Shane Lilley FINALDocument50 pagesStudienarbeit Shane Lilley FINALshane_lilleyNo ratings yet
- R12 - Verzahnung I: Aufgabe 1Document8 pagesR12 - Verzahnung I: Aufgabe 1maraska10No ratings yet
- Thermodynamik SkriptDocument86 pagesThermodynamik SkriptAndrés LizcanoNo ratings yet
- Skiptum Elektrotechnik - Fluidtechnik KMS 1Document48 pagesSkiptum Elektrotechnik - Fluidtechnik KMS 1Gezim KryeziuNo ratings yet
- Werk Ze Ug Kon Struk TionDocument65 pagesWerk Ze Ug Kon Struk TionRodolfo GarciaNo ratings yet
- Kisssoft Tut 004 D SchraubenDocument9 pagesKisssoft Tut 004 D SchraubenBùi Văn HợpNo ratings yet
- Klausurwiederholung 22-23 LösungDocument47 pagesKlausurwiederholung 22-23 LösungNguyễn Văn QuangNo ratings yet
- Ermüdung Im Stahl - Und Anlagenbau - KnödlDocument15 pagesErmüdung Im Stahl - Und Anlagenbau - KnödlHakan CetinkayaNo ratings yet
- Preview of Konstruktionsleitfaden Fertigungstechnik Anwendungsbeispiele Aus Der Praxis German EditionDocument6 pagesPreview of Konstruktionsleitfaden Fertigungstechnik Anwendungsbeispiele Aus Der Praxis German EditionNaukowyDrp100% (1)
- TechnischeDaten PDFDocument84 pagesTechnischeDaten PDFAdrianaVazquez100% (1)
- Strömungsmechanik: Klaus Gersten Heinz HerwigDocument871 pagesStrömungsmechanik: Klaus Gersten Heinz HerwigValentino TurotNo ratings yet
- Fem Kurs Fem Simulationen Mit Abaqus Baaserweb deDocument76 pagesFem Kurs Fem Simulationen Mit Abaqus Baaserweb deRene KurniadiNo ratings yet
- Bridge Design Eurocodes Worked Examples Annex OnlyDocument20 pagesBridge Design Eurocodes Worked Examples Annex OnlyMarioNo ratings yet
- Getriebe Grundlagen1 PDFDocument78 pagesGetriebe Grundlagen1 PDFmgualdiNo ratings yet
- Übungsaufgaben - KinematikDocument7 pagesÜbungsaufgaben - KinematikLucas PruessnerNo ratings yet
- Festigkeitslehre PDFDocument30 pagesFestigkeitslehre PDFnurettinNo ratings yet