Professional Documents
Culture Documents
Proyecto de Grado Daniel Saavedra
Uploaded by
Sharito CaOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Proyecto de Grado Daniel Saavedra
Uploaded by
Sharito CaCopyright:
Available Formats
UNIVERSIDAD MAYOR DE SAN ANDRS
FACULTAD DE INGENIERA
INGENIERA CIVIL
APLICACIN DEL MTODO DE LOS ELEMENTOS FINITOS AL
ANLISIS DE ESTRUCTURAS TRIDIMENSIONALES Y DE
DIFERENTES TIPOLOGAS
Daniel Saavedra Maldonado
Trabajo de Proyecto de Grado para
optar al ttulo de Licenciado en
Ingeniera Civil
Tutor: Ing. Pastor Barrn Leiton
La Paz Bolivia, 2011
DEDI CA DO A :
Mi f ami l i a y a Gabr i el a Sossa, qui enes dur ant e t oda
mi vi da uni ver si t ar i a me han br i ndado su apoyo
i ncondi ci onal , amor y pasi enci a con l a cual he l ogr ado
t er mi nar l a car r er a adems del pr esent e t r abaj o, y
especi al ment e a mi s padr es Dani el Saavedr a y
Pal mi r a Mal donado, con amor y et er na gr at i t ud.
A GRA DECI MI ENTOS:
A t odos l os i ngeni er os y ami gos, que apor t ar on a est e
t r abaj o a t r avs de bi bl i ogr af a y val i osos consej os, per o
sobr e t odo un agr adeci mi ent o especi al al I ng. Past or
Bar r n L ei t on por t oda l a dedi caci n, gua y el apoyo
br i ndado en l a r eal i zaci n del pr esent e t r abaj o de
pr oyect o de gr ado.
RESUMEN
El presente trabajo de proyecto de grado estudia el elemento tridimensional
isoparamtrico de treinta y dos nodos mediante un anlisis elstico lineal,
describiendo en forma resumida los conceptos y teoras bsicas del mtodo de los
elementos finitos aplicado a diferentes estructuras civiles. Para demostrar las virtudes
y facilidades que brinda este mtodo se realizo un programa de computacin en el
lenguaje Visual Basic, este programa fue escrito en forma clara y explicativa para
facilitar su futura edicin por el lector o el autor, adicionalmente el programa es capaz
de resolver estructuras tridimensionales y bidimensionales con lados curvos o rectos.
La interfaz del Programa con el usuario es prctica y sencilla, utiliza y permite varias
formas de introduccin de datos, cuenta adems con parmetros de control para
evitar errores durante la ejecucin del programa. El programa cuenta con espacios
vacios dispuestos para la adicin de otros tipos de elementos, tambin tiene una
relacin con el ACCES y EXCEL lo cual permite manejar una base de datos para los
materiales y permite importar datos o exportas resultados en una hoja EXCEL. El
programa puede resolver distintos estados de carga, y actualmente cuenta con las
cargas puntuales nodales, cargas uniformemente distribuidas sobre las caras del
elemento y fuerzas nodales equivalentes por el peso propio del mismo.
El programa ha sido utilizado y puede ser utilizado para resolver diferente tipo de
problemas como ser: Vigas gruesas rectas, vigas gruesas curvas, vigas pared, losas
gruesas, losas con curvatura, losas con huecos, muros rectos, muros con curvatura, y
la combinacin de los mismos, adems tambin se puede analizar presas de
gravedad, presas bveda, piezas de ingeniera mecnica.
Se realizo ejemplos sencillos desde el punto de vista de comparacin, se comparo los
resultados con el software SAP 2000 y ADINA SYSTEM, estos ejemplos presentaron
resultados con diferencias o variaciones mnimas, estas diferencias entre el programa
desarrollado y el SAP 2000 ADINA se deben a varios factores como ser: La
precisin de almacenamiento de variable, mtodo de inversin de la matriz, capacidad
y velocidad del ordenador y mtodo de integracin numrica empleado. Por lo tanto,
se concluyo que el programa desarrollado en el presente trabajo de proyecto de grado
da resultados aceptables y dentro del margen permitido de dispersin.
ABSTRACT
This proyect work examines the three-dimensional isoparametric element of thirty-
two nodes using a linear elastic analysis, describing briefly the basic concepts and
theories of finite element method applied to different civil structures. To
demonstrate the strengths and facilities offered by this method a computer
program was made in the "Visual Basic" language, this program was written in a
clear and explanatory to facilitate future editing by the reader or the author, the
program can further to solve two-dimensional and three-
dimensional structures with curved or straight sides.
The interface with the user program is practical and easy to use and allows various
forms of data entry, also has control parameters to avoid errors during program
execution. The program has empty spaces ready for the addition
of other elements, also has a relationship with ACCESS and EXCEL which can
handle a database for materials and to import or export dataresults in an Excel
spreadsheet. The program can solve various load states, and currently
has nodal point loads, uniformly distributed loads on the faces of the element
and nodal forces equivalent to the weight of it.
The program has been used and can be used to solve different kinds of
problems such as: straight thick beams, thick beams curved, wall beams,
slabs thick, curved slabs, slabs withhollow, straight walls, curved walls, and the
combination of them, can also be analyzed further gravity dams, arch dam, parts of
mechanical engineering.
It was performed simple examples to compare with the SAP 2000 software and
ADINA SYSTEM, the examples presented results with differences or slight
variations, this differences between the developed program and SAP 2000 or ADINA
are due to several factors including: The accuracy of variable storage, method
of investment the matrix, capacity and speed of computer and numerical integration
method used. Therefore, it was concluded that the program developed in this proyect
work gives acceptable results and within the allowable range of dispersin.
CONTENIDO
CAPTULO I................................................................................................................... 1
1.1 INTRODUCCIN................................................................................................. 1
1.2 ESTADO DE ARTE.............................................................................................. 2
1.3 OBJETIVOS......................................................................................................... 4
1.3.1 Objetivo general. ............................................................................................. 4
1.3.2 Objetivos especficos....................................................................................... 4
1.4 FINES. ................................................................................................................. 5
1.5 LIMITACIONES.................................................................................................... 5
CAPTULO II.................................................................................................................. 7
2.1 ESTUDIO DEL PROBLEMA ................................................................................ 7
2.2 IDEALIZAR LA ESTRUCTURA............................................................................ 7
2.3 ESTUDIO DEL ELEMENTO................................................................................. 9
2.3.1 Tipos de elementos ......................................................................................... 9
2.3.2 Eleccin del elemento a ser estudiado .......................................................... 12
2.3.3 Funciones de forma....................................................................................... 15
2.4 DETERMINACIN DEL JACOBIANO................................................................ 21
2.5 PRINCIPIOS FUNDAMENTALES A SER CUMPLIDOS .................................... 29
2.5.1 Hacer cumplir la relacin geomtrica............................................................. 29
2.5.2 Hacer cumplir la relacin fsica...................................................................... 30
2.6 INTEGRACIN NUMRICA.............................................................................. 33
2.7 ENSAMBLE DE LA ESTRUCTURA................................................................... 36
2.8 APLICAR LAS CONDICIONES DE BORDE ...................................................... 37
2.9 CARGAS NODALES EQUIVALENTES.............................................................. 37
2.10 RESOLUCIN DEL SISTEMA........................................................................... 40
2.11 ANLISIS COMPLEMENTARIO........................................................................ 41
2.11.1 Calculo de tensiones. .................................................................................... 41
CAPTULO III............................................................................................................... 43
3.1 PROGRAMA COMPUTACIONAL DE APLICACIN.......................................... 43
3.1.1 CARACTERISTICAS DEL PROGRAMA. ...................................................... 43
3.2 ORGANIZACIN GENERAL DEL PROGRAMA................................................ 45
3.2.1 Tipos de variables ......................................................................................... 46
3.2.2 Seleccin de los nombres de las variables .................................................... 48
3.2.3 Transmisin de informacin entre subrutinas ................................................ 48
3.2.4 Men principal: Men .................................................................................. 49
3.3 ENTRADA DE DATOS: PESTAA Datos........................................................ 50
3.3.1 Tipologa del problema: Tipologa ............................................................... 50
3.3.2 Propiedades del material: Materiales .......................................................... 51
3.3.3 Datos geomtricos: Geometra.................................................................... 52
3.3.4 Condiciones de contorno............................................................................... 52
3.4.1 Estados de carga........................................................................................... 53
3.4.2 Fuerza en los nodos...................................................................................... 54
3.4.3 Fuerzas distribuidas ...................................................................................... 54
3.5 VER DATOS Y CARGAS................................................................................... 55
3.6 CALCULAR........................................................................................................ 55
3.6.1 Listado de la Rutina principal CALCULAR.................................................. 55
3.6.2 Matriz De Rigidez: Subrutina RIGIMAT ....................................................... 56
3.6.3 Ensamble de la matriz de rigidez................................................................... 70
3.6.4 Calculo Del Vector De Fuerzas: Subrutina FUERZAS................................... 71
3.6.5 Listado de Funciones auxiliares..................................................................... 78
3.6.7 Calculo de reacciones. Subrutina REACCIONES........................................ 81
3.6.8 Calculo de las tensiones elementales. Subrutina TENSION........................ 81
3.7 VER RESULTADOS .......................................................................................... 84
CAPTULO IV .............................................................................................................. 86
4. EJEMPLOS DE APLICACIN Y RESULTADOS.................................................... 86
4.1 VALIDACION DE LOS RESULTADOS .............................................................. 86
4.1.1 Solido ............................................................................................................ 87
4.1.2 Losa .............................................................................................................. 90
4.1.3 Muro arco...................................................................................................... 96
4.2 OTRAS APLICACIONES ................................................................................... 98
CAPTULO V ............................................................................................................. 100
5.1 CONCLUSIONES GENERALES...................................................................... 100
5.2 CONCLUSIONES ESPECFICAS. ................................................................... 101
5.3 RECOMENDACIONES.................................................................................... 102
CAPTULO VI ............................................................................................................ 104
6.1 BIBLIOGRAFIA................................................................................................ 104
6.1.1 Mtodo De Los Elementos Finitos............................................................... 104
6.1.2 Tesis de la U.M.S.A. .................................................................................... 105
6.1.3 Anlisis Estructural ...................................................................................... 105
CAPTULO VII ........................................................................................................... 107
7.1 ANEXO 1: DEMOSTRACIONES...................................................................... 107
7.1.1 Demostracin de la obtencin de las funciones de forma............................ 107
7.1.2 Demostracin de las ecuaciones de equilibrio............................................. 112
7.1.3 Demostracin de la relacin Fsica.............................................................. 113
7.1.4 Demostracin de la relacin Geomtrica..................................................... 115
7.1.5 Demostracin del principio de los trabajos virtuales...................................... 116
7.2 ANEXO 2: NOMBRE DE LAS VARIABLES UTILIZADAS ................................ 120
CAPITULO I:
CAPITULO INTRODUCTORIO
CAPTULO INTRODUCTORIO
1
CAPTULO I
1.1 INTRODUCCIN
Una de las ms importantes aplicaciones del mtodo de los elementos finitos, se ve
desarrollada en el anlisis de estructuras civiles, y con el advenimiento de las computadoras
sea caracterizado como el mtodo ms utilizado por diferentes cualidades como ser:
- El dominio complejo es dividido en subdominios de formas geomtricas sencillas
denominadas elementos.
- Considerando la idea bsica de que cualquier forma continua puede ser
representada como una combinacin lineal de funciones algebraicas polinomiales, a
ser dividida en subdominios, estas funciones son ms sencillas o de menos
parmetros.
- Las relaciones algebraicas planteadas en funcin de los parmetros utilizados en la
combinacin lineal de funciones, debe satisfacer en forma aproximada las
ecuaciones que gobiernan el problema
Segn estos criterios utilizaremos al Mtodo de los Elementos Finitos como un procedimiento
general de discretizacin de los problemas continuos planteados por expresiones definidas
matemticamente, y se ve necesaria la implementacin de un programa de computacin para
demostrar las virtudes y facilidades que brinda dicho mtodo.
Los estudios desarrollados en la Universidad Mayor De San Andrs antes del 2005
referentes al Mtodo de los Elementos Finitos trataban de reducir las variables del problema
de tal forma de no ocupar demasiado espacio en el ordenador y no sobrepasar su capacidad,
sin embargo, en los ltimos aos el desarrollo tecnolgico de los ordenadores ha ido
creciendo inimaginablemente, lo cual permite introducir ms variables, para as resolver
problemas ms grandes y complejos.
Con excepcin de las estructuras de barras que corresponden a sistemas discretos, la mayor
parte de las estructuras en ingeniera son de naturaleza continua y, esencialmente nos
concentramos en el estudio de estructuras de orden continuo tridimensional, dada la mayor
complejidad para analizarlas por procedimientos ms tradicionales. Como ejemplos podemos
mencionar, estructuras con formas complejas o difciles de idealizar en elementos lineales y
bidimensionales.
CAPTULO INTRODUCTORIO
2
Desde luego que utilizar un elemento de ms de 20 nodos en los aos 90 era impensable.
Por tanto con el desarrollo tecnolgico de los ordenadores las dificultades presentadas en
aos anteriores hoy en da ya no lo son, es por eso que en el presente proyecto de grado se
realizo el estudio de Elemento Tridimensional Isoparamtrico De 32 Nodos, el cual nos va a
permitir resolver cualquier tipo de estructura solida mediante un anlisis elstico lineal.
1.2 ESTADO DE ARTE.
- Teddy Cuellar Muller, Calculo de placas por el mtodo de elementos finitos utilizando el
elemento rectangular, UMSA, La Paz Bolivia
Este proyecto de grado proporciona una recopilacin y resumen, a dems de una detallada
explicacin del mtodo de los elementos finitos y la teora de la elasticidad con ejemplos
simples y bsicos, presenta adems un programa aplicativo relativamente antiguo utilizando
un elemento bsico rectangular.
- Ibaez Nacif Carlos Antonio, Calculo de cascaras por el mtodo de elementos finitos,
UMSA, La Paz Bolivia, 1985
Este proyecto de grado explica la teora y las hiptesis de cascaras, sin embargo ms
adelante se presenta un proyecto de grado ms refinado, producto de la evolucin de los
ordenadores.
- Flores Chavez Mario, Anlisis dinmico de estructuras mediante el mtodo de elementos
finitos, UMSA, La Paz Bolivia, 1993
Este proyecto de grado presenta una compilacin del mtodo de los elementos finitos,
enfocndose en un anlisis dinmico el cual refuerza algunos conceptos fundamentales, y
se ve claramente la diferencia frente a un anlisis esttico.
- Haenke Villegas Edwin, Elementos finitos para la solucin de placas delgadas, UMSA, La
Paz Bolivia, 1996
Este proyecto de grado seria el complemento al presentado por Teddy Cuellar, adems se
ha desarrollado un programa aplicativo utilizando elementos ms complejos.
- Marco Antonio Alaya Arnez, Anlisis de elementos tridimensionales curvos de vigas por el
mtodo de elementos finitos, EMI, La Paz Bolivia, 1997
CAPTULO INTRODUCTORIO
3
Este proyecto de grado compilo los fundamentos tericos del mtodo de elementos finitos,
desarrollo la aplicacin del mtodo de elementos finitos al anlisis tridimensional, mediante el
estudio de elementos isoparamtricos, elaborando finalmente un programa.
- Seborga Pozo Julio Roberto, Estudio y comparacin de elementos finitos con funciones de
interpolacin lineal y cuadrticas, UMSA, La Paz Bolivia, 2009
Este proyecto de grado, como el nombre lo indica realizo una comparacin de elementos
finitos con funciones de interpolacin lineal y cuadrticas
- Quino Chuquimia Milton, Calculo de cascaras por el mtodo de elementos finitos utilizando
elementos isoparamtricos triangulares, UMSA, La Paz Bolivia, 2005
Este proyecto de grado presenta una introduccin compacta, adems de un resumen de los
mtodos analticos y MEF de anlisis de cascaras, y la programacin de las aplicaciones en
MatLab, si bien este es uno de los programas ms modernos frente a todas los proyectos de
grado consultados, la edicin del programa se torna muy compleja, debido a que carece de
notas o esquemas de ayuda que hagan ms amigable al programa.
- Arturo Martin Deheza Rossel, Anlisis lineal de slidos por el mtodo de elementos finitos,
EMI, La Paz Bolivia, 1999
Los anteriores proyectos de grado se enfocaban en un anlisis bidimensional, este proyecto
de grado incursiono en el anlisis tridimensional de un elemento rectangular de 32 nodos, es
por este motivo que se lo desarrolla con ms detalle.
Este proyecto de grado es bastante extenso, debido a que en su primer captulo desarrolla
una introduccin bsica del MEF, en el segundo captulo realiza una explicacin detallada y
minuciosa de la teora de la elasticidad, en su tercer captulo desarrolla la formulacin de la
funciones prueba en forma global (considerando un anlisis bi o tridimensional) adems de
las condiciones y criterios que debe cumplir aplicando el mtodo de Ritz, en el cuarto captulo
se muestra una compilacin de los elementos tridimensionales tetradricos, hexadricos y
sus homlogos isoparamtricos, tambin se muestra la recopilacin de las familias de
Lagrange, Serindpitos y un detalle de todos los elementos ms comunes, tambin se detalla
la integracin numrica tanto para elementos unidimensionales, bidimensionales y
tridimensionales. Finalmente presenta las coordenadas naturales del elemento
isoparamtrico de 32 nodos y sus funciones prueba, lamentablemente desglosa una
CAPTULO INTRODUCTORIO
4
explicacin escasa del clculo de la matriz de rigidez, la integracin numrica y el clculo de
deformaciones y tensiones, as como la discretizacion y el ensamble de la estructura.
La programacin de las aplicaciones fueron en Visual Basic 4.0, sin embargo, no presenta
impreso el cdigo de programacin ni el programa en formato digital, por ende este se torna
muy complejo, debido a que carece de notas o esquemas de ayuda que muestren como
aplico el mtodo de los elementos finitos.
1.3 OBJETIVOS
1.3.1 Objetivo general.
- Estudiar el elemento tridimensional isoparamtrico de 32 nodos mediante un anlisis
elstico lineal.
- Realizar un programa en VISUAL ESTUDIO aplicando el mtodo de los elementos finitos
a diferentes estructuras como caso de anlisis tridimensional en forma general.
- Describir y desarrollar de forma clara la programacin utilizada, para posteriores
modificaciones por el autor o el lector.
- Comparar los resultados del programa desarrollado en visual estudio 2010 con un
programa del mercado.
1.3.2 Objetivos especficos.
- Describir en forma resumida, y haciendo referencia a la bibliografa los conceptos y
teoras bsicas del mtodo de los elementos finitos aplicado a diferentes estructuras
civiles.
- Desarrollar un programa claro, fcil de usar, con varias opciones para ingresar y exportar
los resultados de cada elemento.
- El programa debe ser capaz de resolver estructuras tridimensionales, y bidimensionales
como losas y muro, ya sean estos con lados curvos rectos.
CAPTULO INTRODUCTORIO
5
1.4 FINES.
Uno de los fines ms importantes del proyecto de grado se enfoca en la generalidad y
reduccin de tiempo de clculo y adems de que el lector entienda como:
- Aplicar el mtodo de los elementos finitos a estructuras civiles.
- Se ha desarrollado el programa, adems de entender el lenguaje de programacin.
- Una vez entendido el programa, el lector debe ser capaz de modificar el programa:
1. Adicionando otros elementos de estudio.
2. Adicionando otras tipologas, como por ejemplo podra utilizarse la teora de
lminas planas, laminas curvas o la teora de la elasticidad tridimensional y aplicar
el mtodo de elementos finitos con las variaciones correspondientes a cada teora.
1.5 LIMITACIONES
El presente proyecto de grado ha sido desarrollado en el marco del anlisis elstico lineal, la
incursin de un anlisis no lineal geomtrico mecnico, un anlisis dinmico la
consideracin de la variacin del tiempo es sujeto de un estudio posterior de postgrado o
maestra.
El desarrollar una explicacin detallada de la teora de la elasticidad la teora del mtodo de
los elementos finitos se sale de los objetivos del proyecto de grado, porque se considera que
la bibliografa consultada desarrolla estos aspectos de forma clara y con ejemplos detallados.
Sin embargo, durante el desarrollo del presente proyecto de grado se presentara un resumen
de los conceptos y las formulas en las que se apoyara el trabajo, dando una explicacin
breve del porque de la seleccin de algunas cualidades especificas del estudio, todo esto
sustentado y referida a la bibliografa consultada.
CAPITULO II:
MARCO TEORICO
CAPTULO II
2.1 ESTUDIO DEL PROBLEMA
Para resolver los problemas de estructuras civiles mediante el mtodo de los elementos finitos,
se debe seguir un proceso general:
2.2 IDEALIZAR LA ESTRUCTURA
En ingeniera una forma de pr
los sistemas en componentes individuales (elementos), cuyo comportamiento se puede conocer
sin dificultad para posteriormente ensamblar el sistema original a partir de los elementos
estudiados. De aqu es donde se generan los sistemas discretos y sistemas continuos, donde los
IDEALIZAR LA ESTRUCTURA
ESTUDIO DEL ELEMENTO
ENSAMBLE DE LA
ESTRUCTURA
APLICAR LAS CONDICIONES
DE BORDE
RESOLUCIN DEL SISTEMA
ANLISIS COMPLEMENTARIO
7
ESTUDIO DEL PROBLEMA
resolver los problemas de estructuras civiles mediante el mtodo de los elementos finitos,
se debe seguir un proceso general:
Grafica No 1. Esquema de solucin por el M.E.F.
Fuente: Elaboracin propia
IDEALIZAR LA ESTRUCTURA
En ingeniera una forma de proceder a la solucin de problemas complejos consiste en separar
los sistemas en componentes individuales (elementos), cuyo comportamiento se puede conocer
sin dificultad para posteriormente ensamblar el sistema original a partir de los elementos
. De aqu es donde se generan los sistemas discretos y sistemas continuos, donde los
Discretizar la estructura
Sistemas Discretos y Continuos IDEALIZAR LA ESTRUCTURA
Eleccion del tipo de elemento
Planteamiento de las Funciones de Forma
Relacion Fisica y Geometrica
Condiciones de Equilibrio
ESTUDIO DEL ELEMENTO
Requisitos para la Convergencia
Condiciones sobre la Compatibilidad
y Equilibrio de la Solucion
ENSAMBLE DE LA
Tipos de condiciones de borde
APLICAR LAS CONDICIONES
Integracin numrica en tres dimensiones
RESOLUCIN DEL SISTEMA
Calculo de las tensiones.
Calculo de los Desplazamientos
Calculo de las Reacciones
ANLISIS COMPLEMENTARIO
MARCO TEORICO
resolver los problemas de estructuras civiles mediante el mtodo de los elementos finitos,
oceder a la solucin de problemas complejos consiste en separar
los sistemas en componentes individuales (elementos), cuyo comportamiento se puede conocer
sin dificultad para posteriormente ensamblar el sistema original a partir de los elementos
. De aqu es donde se generan los sistemas discretos y sistemas continuos, donde los
Planteamiento de las Funciones de Forma
Integracin numrica en tres dimensiones
MARCO TEORICO
8
sistemas discretos estn definidos por la solucin de un numero finito de variables del problema,
y los sistemas continuos son problemas de subdivisin indefinida y solo puede definirse
haciendo uso de la ficcin matemtica de infinitsimo.
Imagen No 1 de elementos discretos
Fuente: Texto de Zienkiewic, V1
Imagen No 2: Elementos continuos
Fuente: Texto de Zienkiewic, V1
Algunas de las dificultades con las que se enfrenta son: el poder identificar la forma ms
adecuada para discretizar la estructura, determinar el nmero de elementos y el ms importante
la numeracin y el reporte de las coordenadas de cada uno de los elementos.
MARCO TEORICO
9
2.3 ESTUDIO DEL ELEMENTO
2.3.1 Tipos de elementos
Una de las primeras decisiones en el clculo de una estructura por elementos finitos es
seleccionar el elemento que se va a utilizar para el anlisis. Esta decisin es propia del
calculista que tiene que pronunciarse en base a: 1) Las caractersticas propias de la
estructura a analizar. 2) los tipos de elementos, programas y capacidad de ordenador
disponible y 3) la experiencia acumulada en la solucin de estructuras similares por el mtodo
de elementos finitos. A continuacin se presenta una breve recopilacin de las normas
mnimas que pueden tenerse en cuenta a la hora de seleccionar un elemento finito.
- En caso de que se tenga una cierta idea de la forma polinomica de la solucin, conviene
utilizar elementos con funciones de forma del mismo grado que la solucin conocida. Esto
no solo favorece la obtencin de la solucin exacta en los nodos, si no tambin garantiza
que la obtencin de los desplazamientos en el interior de cada elemento es la correcta.
Desafortunadamente, esta situacin no ocurre en la mayor parte de los casos de inters
prctico.
- En zonas donde se intuya que pueden existir gradientes de tensin elevados es ms
adecuado utilizar elementos de mayor orden. Por el contrario, en zonas donde dicha
variacin sea ms uniforme puede obtenerse una buena aproximacin con elementos
menos precisos.
- Dadas las crecientes posibilidades de rapidez de clculo y de capacidad de
almacenamiento de los ordenadores actuales, puede ser recomendable utilizar elementos
finitos sencillos (pocos nodos) frente a elementos ms complejos (muchos nodos)
Para obtener una buena aproximacin en ciertos casos ser necesario utilizar un mayor
nmero de elementos que si se emplearan directamente elementos de rdenes superiores es
decir en la prctica suele ser preferible obtener la precisin deseada utilizando mallas mas
tupidas de elementos sencillos que mallas groseras de elementos ms complejos, sin
embargo existen muchas estructuras cuyas caractersticas geomtricas, mecnicas o de
cargas no permiten la utilizacin de modelos de clculo simplificados.
Una vez identificado el tipo de problema a encarar, el siguiente paso es seleccionar un
elemento. Estos elementos continuos se subdividen de acuerdo al tipo de anlisis, que puede
ser bidimensional o tridimensional, adicionalmente existe un grupo denominado slidos de
MARCO TEORICO
10
revolucin. A continuacin se desarrolla un resumen de los elementos ms importantes de
cada grupo.
ANALSIS UNIDIMENSIONAL
- Elemento lineal de dos nodos
- Elementos lineales de varios nodos
ANALSIS BIDIMENSIONAL
- Elemento triangular de tres nodos
- Elemento rectangular de cuatro nodos
- Elementos triangulares:
o Lineal de tres nodos
o Cuadrtico de seis nodos
o Cubico de diez nodos
- Elementos rectangulares Lagrangianos:
o De cuatro nodos
o De nueve nodos
o Cubico de diecisis nodos
o Otros.
- Elementos rectangulares Serindpitos:
o Cuadrtico de ocho nodos
o Cubico de doce nodos
o De cuarto grado de diecisiete nodos
Imagen No3. Elementos lineales
Fuente: Texto de Zienkiewic, V1
Imagen No4. Elementos triangulares
Fuente: Texto de Zienkiewic, V1
Imagen No5. Elementos rectangulares Lagrangianos
Fuente: Texto de Zienkiewic, V1
Imagen No6. Elementos rectangulares Serndipitos
Fuente: Texto de Zienkiewic, V1
MARCO TEORICO
11
- Elementos isoparamtricos bidimensionales:
o Elementos cuadrticos
o Elementos triangulares
SOLIDOS DE REVOLUCIN
- Elementos triangulares o rectangulares de lados rectos.
- Elementos slidos de revolucin isoparamtricos
ANLISIS TRIDIMENSIONAL
- Elemento tetradrico de cuatro nudos.
- Elementos hexadricos rectos:
o Lineal de ocho nodos
o Cuadrtico de veintisiete nodos
o Otros de orden superior
- Elementos hexadricos rectos Serindpitos:
o De vente nodos
o De treinta y dos nodos
Imagen No7. Elementos isoparamtricos
bidimensionales
Fuente: Texto de Zienkiewic, V1
Imagen No8. Slidos de revolucin
Fuente: Texto de Zienkiewic, V1
Imagen No9. Elementos hexadricos
Rectos Serindpitos
Fuente: Texto de Zienkiewic, V1
MARCO TEORICO
12
- Elementos tetradricos de lados rectos:
o Lineal de cuatro nodos
o Cuadrtico de diez nodos
o Cubico de vente nodos
- Elementos tridimensionales isoparamtricos
2.3.2 Eleccin del elemento a ser estudiado
Para realizar la eleccin del elemento que se estudio, se tomaron en cuenta los siguientes
criterios:
a) El elemento triangular de tres nodos es el ms sencillo para el anlisis bidimensional, su
equivalencia tridimensional es el tetraedro, sin embargo este tetraedro presenta las
siguientes dificultades:
- Ordenar la numeracin de los nodos
- Representar adecuadamente un cuerpo dividido en este tipo de elementos.
- El numero de tetraedros necesarios para obtener un orden de aproximacin
determinado ha de ser muy grande lo que con lleva a un nmero elevado de
ecuaciones
- Limita gravemente la aplicacin prctica del mtodo
- Requiere un ancho de banda grande por tanto exige ordenadores con mayor
capacidad.
Imagen No10. Elementos tetradricos recto
Fuente: Texto de Zienkiewic, V1
Imagen No11. Elementos tridimensionales
isoparamtricos.
Fuente: Texto de Zienkiewic, V1
MARCO TEORICO
13
Sin embargo, un hexaedro es equivalente a cinco tetraedros. Y es por estas dificultades
que se opta por un elemento hexadrico.
b) Existen dos caminos para generar las funciones de forma, un elemento serindpito y otro
Lagrangiano
1
, dentro de las principales diferencias se destaca:
- Para elementos Serindpitos son ms laboriosas las funciones de forma.
- Los elementos Serindpitos precisan un menor nmero de variables nodales que
los Lagrangianos para definir un polinomio completo de determinado grado.
- Desde el punto de vista comparativo de nmero de nodos segn el grado (ver
Cuadro No1), los elementos de Lagrange no resultan competitivos frente a sus
anlogos Serindpitos por utilizar un mayor nmero de variables
Grado Lagrange Serindiptico
Lineal
8 8
Cuadrtico
27 20
Cubico
64 (4 nodos/arista) 32
Cuartico
125 (5
nodos/arista)
-
Cuadro No 1. Cuadro comparativo de nmero de nodos para elementos
de Lagrange y Serindpitos segn el grado. Fuente: Elaboracion propia
Por lo tanto se opto por elementos Serindpitos.
c) Como se detalla en el cudro No 1, la familia serindpita solo produce polinomios completos
hasta el tercer grado (cubico) por lo que elementos de mayor grado no produciran
mejoras significativas en la velocidad de convergencia, se puede decir que el elemento
tridimensional serindpito de tercer grado de 32 nodos es el elemento de mxima potencia
de la familia indicada.
Es por estas razones la eleccin del elemento de treinta y dos nodos.
d) Como se muestra en la imagen No 12, si la geometra y la variacin de la funcin vienen
definidas por los mismos puntos (N =N), se llama entonces isoparamtricos, podramos
utilizar sin embargo los cuatro puntos de los vrtices para definir la variacin de u, nos
1
Para profundizar, revisar Cap. 7 Eugenio Oate
MARCO TEORICO
14
referimos a tal elemento como sper-paramtrico, similarmente si para definir u
introducimos mas nodos que los empleados para definir la geometra al elemento
resultante lo llamaremos Sub-paramtrico. A continuacin se detallan algunas de las
ventajas ms relevantes de la formulacin isoparamtrica:
- La formulacin isoparamtrica permite utilizar elementos tetradricos y hexadricos
irregulares y con lados curvos.
- La principal idea en la formulacin de los elementos finitos isoparamtricos en
general es lograr la relacin entre los desplazamientos de cualquier punto del
elemento y los desplazamientos nodales del elemento, directamente a travs del uso
de funciones de interpolacin tambin llamadas funciones de forma.
- Para asegurar que un nmero pequeo de elementos pueda representar una forma
relativamente complicada como las que aparecen en los problemas reales, ya no son
suficientes simples rectngulos o tringulos.
-
-
Cabe recordar que los dos principales conceptos que permitieron el desarrollo del mtodo de
los elementos finitos son la formulacin paramtrica y la integracin numrica. De la
experiencia deducimos que a menos que utilicemos una aproximacin geomtrica correcta se
producir errores de aproximacin de geometra que conviene evitar o, como mal menor,
minimizar.
Por consiguiente, se realizara la transformacin de estas formas sencillas en otras
configuraciones ms arbitrarias. En la prctica es usual utilizar la formulacin isoparamtrica.
No obstante conviene tener claros los conceptos anteriores ya que en determinadas
situaciones de geometra excesivamente compleja sencilla puede ser ms conveniente
hacer uso de las otras dos opciones.
Finalmente una vez conocidas las razones las cuales nos llevaron a elegir el ELEMENTO
TRIDIMENSIONAL ISOPARAMETRICO DE 32 NODOS, a continuacin presentaremos sus
coordenadas naturales.
Imagen No 12. O punto donde la coordenada es especificada, ?~puntos donde la funcin
paramtrica es especificada. a) Isoparamtrico, b) superparametrico, c) subparametrico
MARCO TEORICO
15
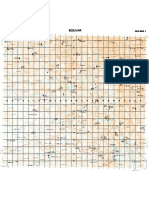
Grafica No2. Coordenadas naturales
Fuente: Elaboracin propia
Nodos de vrtice Nodos de arista
Cuadro No2: Cuadro de coordenadas naturales del elemento
Fuente: Elaboracin propia
2.3.3 Funciones de forma
2
El procedimiento para una solucin numrica aproximada est caracterizado por tres
operaciones principales:
2
Captulo 2, texto de Zienkiewic, V1
Nudo ?< ?: ?:
1 -1 -1 -1
4 1 -1 -1
9 -1 1 -1
12 1 1 -1
21 -1 -1 1
24 1 -1 1
29 -1 1 1
32 1 1 1
Nudo ? ? ? Nudo ? ? ?
2 - 1/ 3 -1 -1 13 -1 -1 - 1/ 3
3 1/ 3 -1 -1 14 1 -1 - 1/ 3
5 -1 - 1/ 3 -1 15 -1 1 - 1/ 3
6 1 - 1/ 3 -1 16 1 1 - 1/ 3
7 -1 1/ 3 -1 17 -1 -1 1/ 3
8 1 1/ 3 -1 18 1 -1 1/ 3
10 - 1/ 3 1 -1 19 -1 1 1/ 3
11 1/ 3 1 -1 20 1 1 1/ 3
22 - 1/ 3 -1 1
23 1/ 3 -1 1
25 -1 - 1/ 3 1
26 1 - 1/ 3 1
27 -1 1/ 3 1
28 1 1/ 3 1
30 - 1/ 3 1 1
31 1/ 3 1 1
MARCO TEORICO
16
Grafica no 3. Esquema de solucin por el M.E.F.
Fuente: Elaboracin propia
En esta seccin describiremos la construccin de la funcin prueba tambin llamada funcin
de forma, esta primera operacin involucra la construccin de la funcin de forma, como una
suma finita de funciones
) ( ...... ) ( ) ( ) ( ) ; (
2 2 1 1
x a x a x a x a x U
N N o
+ + + +
Donde:
x = las variables independientes del problema y las funciones
f = las funciones de forma
a= los coeficientes parmetros indeterminados llamados tambin grados de
libertad o coordenadas generalizadas.
Las funciones de forma utilizadas al formular problemas de elasticidad por el mtodo de los
desplazamientos tienen que satisfacer los criterios de convergencia, donde las condiciones
esenciales para la convergencia de elementos finitos son las siguientes:
- Condicin de continuidad.- Las incgnitas han de presentar continuidad entre elementos
(Co), esta condicin se satisface al utilizar aproximaciones polinmicas para el campo de
desplazamientos.
- Condicin de derivabilidad.- La funcin ha de permitir la representacin de cualquier
forma lineal, de manera que satisfaga el criterio de deformacin constante (primera
derivada constante)
- Condicin de integrabilidad.- La derivada m de una funcin es integrable si son continuas
sus m-1 primeras derivadas.
- Criterio de la parcela
o Condicin de deformacin constante
Construccion
de la funcion
preuba U
Aplicacion del criterio
de optimizacion para U
Estimacion de la
presicion de U
MARCO TEORICO
17
o Condicin de solido rgido (deformacin nula)
Previamente a la construccin de las funciones de forma debemos recordar que existen dos
tipos de funciones de forma, los Estndar y Jerrquicos
3
. Cul elegir? y Por qu?
Nos referimos a las funciones de forma as definidas como estndar, ya que son la base de
la mayora de los programas de elementos finitos, estas funciones de forma estndar tienen
una seria desventaja cuando se hace un refinamiento de elementos, esto requiere generar
funciones de forma totalmente nuevas, y por lo tanto rehacer todos los clculos, por lo cual es
ms ventajoso utilizar una funcin de forma jerrquica, sin embargo, el refinamiento de la
malla con lleva a un anlisis ms profundo y fuera del alcance del presente trabajo de
proyecto de grado, por lo tanto se utilizo las funciones de forma estndar.
2.3.3.1 Planteamiento de las funciones de forma.
El elemento tridimensional isoparamtrico de 32 nodos tiene 8 nodos en los vrtices y 24
nodos repartidos a un tercio de cada arista. Es fcil observar que las funciones de forma
definen una variacin polinmica cubica sobre cada una de las caras del elemento. Las
funciones de forma de los nodos intermedios en las aristas se obtienen por multiplicacin de
un polinomio de Lagrange cubico por otro de primer grado en las coordenadas naturales.
Por otra parte, para los nodos en los vrtices se parte de las funciones de forma lineales del
elemento de ocho nodos a las que se restan sucesivamente las funciones de forma de los
nodos situados en las aristas adyacentes al vrtice en cuestin, ponderadas adecuadamente
de manera que la funcin de forma resultante se anule en dichos nodos, como se ve en el
grafico siguiente.
3
Captulo 7, texto de Zienkiewic, V1
MARCO TEORICO
18
Imagen No13. Funciones de forma de los elementos
Fuente: Texto de Zienkiewic, V1
2.3.3.2 Resumen de las funciones de forma
- Nodos de vrtice
4
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
+ + + + +
o o o i
N
(1)
Donde:
i o
;
i o
;
i o
( ?$
i
, ?$
i
, ?$
i
son las coordenadas normalizadas del nodo)
- Nodos de arista
a) Para 3 / 1 t
i
1 t
i
1 t
i
( )( )( )( )
o o o i
N + + + 1 1 9 1 1
64
9
2
(2)
b) Para 1 t
i
3 / 1 t
i
1 t
i
( )( )( )( )
o o o i
N + + + 1 9 1 1 1
64
9
2
(3)
c) Para 1 t
i
1 t
i
3 / 1 t
i
( )( )( )( )
o o o i
N + + + 9 1 1 1 1
64
9
2
(4)
4
Para ver la demostracin de las funciones de forma vase en anexos Cap. VII
MARCO TEORICO
19
Remplazando las coordenadas naturales en las ecuaciones anteriores (1), (2), (3) y (4)
obtendremos las ecuaciones siguientes del tipo (5), (6), (7) y (8).
- Nodos de vrtice
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
1
+ + N
(5a)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
4
+ + + N
(5b)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
9
+ + + N
(5c)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
12
+ + + + N
(5d)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
21
+ + + N
(5e)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
24
+ + + + N
(5f)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
29
+ + + + N
(5g)
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
32
+ + + + + N
(5h)
- Nodos de arista
a) ( )( )( )( ) 1 1 3 1 1
64
9
2
2
N
(6a)
( )( )( )( ) + 1 1 3 1 1
64
9
2
3
N
(6b)
( )( )( )( ) 1 1 3 1 1
64
9
2
5
N
(6c)
( )( )( )( ) + 1 1 3 1 1
64
9
2
6
N
(6d)
( )( )( )( ) + 1 1 3 1 1
64
9
2
7
N
(6e)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
8
N
(6f)
( )( )( )( ) + 1 1 3 1 1
64
9
2
10
N
(6g)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
11
N
(6h)
MARCO TEORICO
20
b) ( )( )( )( ) + 1 1 3 1 1
64
9
2
22
N
(7a)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
23
N
(7b)
( )( )( )( ) + 1 1 3 1 1
64
9
2
25
N
(7c)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
26
N
(7d)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
27
N
(7e)
( )( )( )( ) + + + 1 1 3 1 1
64
9
2
28
N
(7f)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
30
N
(7g)
( )( )( )( ) + + + 1 1 3 1 1
64
9
2
31
N
(7h)
c) ( )( )( )( ) 1 1 3 1 1
64
9
2
13
N
(8a)
( )( )( )( ) + 1 1 3 1 1
64
9
2
14
N
(8b)
( )( )( )( ) + 1 1 3 1 1
64
9
2
15
N
(8c)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
16
N
(8d)
( )( )( )( ) + 1 1 3 1 1
64
9
2
17
N
(8e)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
18
N
(8f)
( )( )( )( ) + + 1 1 3 1 1
64
9
2
19
N
(8g)
( )( )( )( ) + + + 1 1 3 1 1
64
9
2
20
N
(8h)
Una vez determinado el elemento y las funciones de forma correspondientes las operaciones
sub-siguientes siguen una pauta general ya establecida.
MARCO TEORICO
21
2.4 DETERMINACIN DEL JACOBIANO
Para entender la importancia del clculo del Jacobiano se debe hacer referencia a la ecuacin
(20) que representa la matriz [B], dicha matriz est compuesta por las funciones de forma Ni
derivadas en funcin de las coordenadas cartesianas x, y, z. Sin embargo las funciones de forma
(planteadas en la seccin 2.3.3.2 o bien definidas por las ecuaciones (5), (6), (7) y (8)) estn en
funcin de las coordenadas naturales ?e , ?e, ?e , por lo que se requiere realizar una transformacin
de las coordenadas, por tanto, obtendremos primeramente las derivadas cartesianas de la
funcin de forma Ni necesarias para componer la matriz [B]. Recordemos que el trmino
isoparamtrico surga al utilizar las mismas funciones de forma para interpolar la geometra y los
desplazamientos.
) (
1
e
n
i
i
i
i
i
i
i
i
X N
z
y
x
N
z
y
x
X
'
'
(9)
Donde:
1
1
1
]
1
i
i
i
i
N
N
N
N ; ( ) , , f N
i
Para:
[ ]
n
N N N N ,......., ,
2 1
La ecuacin (9) se expresa en relacin entre las coordenadas cartesianas y las naturales. Dicha
relacin es biunvoca si se cumple que el determinante del Jacobiano de la transformacin x, y, z
?$?$ , ?$, ?$es positiva. En general N
i
vendr expresada en las coordenadas naturales, por lo que la
regla de derivacin en cadena permite escribir:
z
z
N y
y
N x
x
N N
i i i i
(10a)
z
z
N y
y
N x
x
N N
i i i i
(10b)
z
z
N y
y
N x
x
N N
i i i i
(10c)
MARCO TEORICO
22
O en forma matricial:
'
'
1
1
1
1
1
1
1
]
1
'
z
N
y
N
x
N
J
z
N
y
N
x
N
z y x
z y x
z y x
N
N
N
i
i
i
e
i
i
i
i
i
i
) (
(11)
Invirtiendo:
[ ]
'
'
i
i
i
e
i
i
i
N
N
N
J
z
N
y
N
x
N
1
) (
(12)
En la ecuacin (12) es sencillo determinar
i
N
,
i
N
y
i
N
, solo se debe derivar las funciones
de forma representadas por las ecuaciones (6), (7) y (8) lo cual se desarrolla ms adelante. La
pregunta que surge es cmo determinar el Jacobiano
5
?, el Jacobiano se puede determinar
mediante la ecuacin (13) en la cual como ya se mencion, las funciones de interpolacin de
geometra satisfacen los mismos requisitos que las funciones de forma utilizadas para interpolar
el campo de desplazamientos, es decir, que se utilizara las mismas funciones de forma ya
planteadas.
1
1
1
]
1
1
1
1
1
1
1
1
]
1
n
i
i
i
i
i i i
i i i
i i i
e
z
y
x
N N N
N N N
N N N
J
1
) (
(13)
Un diferencial de volumen se expresa por:
) (e
J z y x
(14)
5
Para profundizar ver Cap.3 Texto C.E. por el M.E.F. Eugenio Oate
MARCO TEORICO
23
A continuacin se presenta las derivadas de cada una de las funciones de forma con respecto a
las coordenadas naturales.
- Nodos de vrtice
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 1
+ + +
N
(15a)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 1
+ + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 1
+ + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 4
+ + +
N
(15b)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 4
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 4
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 9
+ + + +
N
(15c)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 9
+ + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 9
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 12
+ + + +
N
(15d)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 12
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 12
+ + + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 21
+ + + +
N
(15e)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 21
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 21
+ + +
N
MARCO TEORICO
24
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 24
+ + + +
N
(15f)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 24
+ + + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 24
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 29
+ + + + +
N
(15g)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 29
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 29
+ + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 32
+ + + + +
N
(15h)
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 32
+ + + + +
N
( )( ) ( ) [ ] 19 18 27 9 1 1
64
1
2 2 2 32
+ + + + +
N
- Nodos de arista
a)
( )( )( ) 3 2 9 1 1
64
9
2 2
N
(16a)
( )( )( )
1 3 1 1
64
9
2 2
N
( )( )( )
1 3 1 1
64
9
2 2
N
( )( )( ) 3 2 9 1 1
64
9
2 3
+
N
(16b)
( )( )( )
1 3 1 1
64
9
2 3
N
( )( )( )
1 3 1 1
64
9
2 3
N
( )( )( )
3 1 1 1
64
9
2 5
N
(16c)
( )( )( ) 3 2 9 1 1
64
9
2 5
N
( )( )( )
3 1 1 1
64
9
2 5
N
MARCO TEORICO
25
( )( )( )
3 1 1 1
64
9
2 6
N
(16d)
( )( )( ) 3 2 9 1 1
64
9
2 6
+
N
( )( )( )
3 1 1 1
64
9
2 6
N
( )( )( )
3 1 1 1
64
9
2 7
N
(16e)
( )( )( ) 3 2 9 1 1
64
9
2 7
+
N
( )( )( )
3 1 1 1
64
9
2 7
N
( )( )( )
3 1 1 1
64
9
2 8
N
(16f)
( )( )( ) 3 2 9 1 1
64
9
2 8
+ +
N
( )( )( )
+ +
3 1 1 1
64
9
2 8
N
( )( )( ) 3 2 9 1 1
64
9
2 10
+
N
(16g)
( )( )( )
1 3 1 1
64
9
2 10
N
( )( )( )
1 3 1 1
64
9
2 10
N
( )( )( ) 3 2 9 1 1
64
9
2 11
+ +
N
(16h)
( )( )( )
1 3 1 1
64
9
2 11
N
( )( )( )
+ +
1 3 1 1
64
9
2 11
N
b) ( )( )( ) 3 2 9 1 1
64
9
2 22
+
N
(17a)
( )( )( )
1 3 1 1
64
9
2 22
N
( )( )( )
1 3 1 1
64
9
2 22
N
MARCO TEORICO
26
( )( )( ) 3 2 9 1 1
64
9
2 23
+ +
N
(17b)
( )( )( )
+ +
1 3 1 1
64
9
2 23
N
( )( )( )
1 3 1 1
64
9
2 23
N
( )( )( )
3 1 1 1
64
9
2 25
N
(17c)
( )( )( ) 3 2 9 1 1
64
9
2 25
+
N
( )( )( )
3 1 1 1
64
9
2 25
N
( )( )( )
3 1 1 1
64
9
2 26
N
(17d)
( )( )( ) 3 2 9 1 1
64
9
2 26
+ +
N
( )( )( )
3 1 1 1
64
9
2 26
N
( )( )( )
+ +
3 1 1 1
64
9
2 27
N
(17e)
( )( )( ) 3 2 9 1 1
64
9
2 27
+ +
N
( )( )( )
3 1 1 1
64
9
2 27
N
( )( )( )
+ +
3 1 1 1
64
9
2 28
N
(17f)
( )( )( ) 3 2 9 1 1
64
9
2 28
+ + +
N
( )( )( )
+ +
3 1 1 1
64
9
2 28
N
( )( )( ) 3 2 9 1 1
64
9
2 30
+ +
N
(17g)
( )( )( )
1 3 1 1
64
9
2 30
N
( )( )( )
1 3 1 1
64
9
2 30
N
MARCO TEORICO
27
( )( )( ) 3 2 9 1 1
64
9
2 31
+ + +
N
(17h)
( )( )( )
+ +
1 3 1 1
64
9
2 31
N
( )( )( )
+ +
1 3 1 1
64
9
2 31
N
c)
( )( )( )
3 1 1 1
64
9
2 13
N
(18a)
( )( )( )
3 1 1 1
64
9
2 13
N
( )( )( ) 3 2 9 1 1
64
9
2 13
N
( )( )( )
3 1 1 1
64
9
2 14
N
(18b)
( )( )( )
3 1 1 1
64
9
2 14
N
( )( )( ) 3 2 9 1 1
64
9
2 14
+
N
( )( )( )
3 1 1 1
64
9
2 15
N
(18c)
( )( )( )
3 1 1 1
64
9
2 15
N
( )( )( ) 3 2 9 1 1
64
9
2 15
+
N
( )( )( )
3 1 1 1
64
9
2 16
N
(18d)
( )( )( )
3 1 1 1
64
9
2 16
N
( )( )( ) 3 2 9 1 1
64
9
2 16
+ +
N
( )( )( )
3 1 1 1
64
9
2 17
N
(18e)
( )( )( )
3 1 1 1
64
9
2 17
N
( )( )( ) 3 2 9 1 1
64
9
2 17
+
N
MARCO TEORICO
28
( )( )( )
3 1 1 1
64
9
2 18
N
(18f)
( )( )( )
+ +
3 1 1 1
64
9
2 18
N
( )( )( ) 3 2 9 1 1
64
9
2 18
+ +
N
( )( )( )
+ +
3 1 1 1
64
9
2 19
N
(18g)
( )( )( )
3 1 1 1
64
9
2 19
N
( )( )( ) 3 2 9 1 1
64
9
2 19
+ +
N
( )( )( )
+ +
3 1 1 1
64
9
2 20
N
(18h)
( )( )( )
+ +
3 1 1 1
64
9
2 20
N
( )( )( ) 3 2 9 1 1
64
9
2 20
+ + +
N
Por ejemplo para un elemento paraleleppedo, remplazando las ecuaciones (15), (16), (17) y (18)
en la ecuacin (13) y operando se obtiene que el Jacobiano es:
1
1
1
]
1
1
1
1
1
1
1
1
]
1
n
i
i
i
i
i i i
i i i
i i i
e
z
y
x
N N N
N N N
N N N
J
1
) (
1
1
1
]
1
c
b
a
J
e
0 0
0 0
0 0
) (
Donde:
, 2 , 2 , 2 c b a Son las dimensiones del elemento en las direcciones x, y, z
respectivamente.
Sin embargo para elementos isoparamtricos, es necesario realizar una integracin numrica.
MARCO TEORICO
29
2.5 PRINCIPIOS FUNDAMENTALES A SER CUMPLIDOS
Como regla bsica, todos los elementos deben cumplir con las relaciones que se describen a
continuacin.
2.5.1 Hacer cumplir la relacin geomtrica
En el elemento tridimensional elegido, el desplazamiento de un punto queda definido por tres
componentes u, v, w en las direcciones x, y, z. Por tanto:
; ; (19a, b,c)
En un anlisis tridimensional completo y siguiendo la clsica teora de elasticidad
tridimensional donde el elemento infinitesimal en estudio, al ser sometido a un estado de
tensiones, se deforma cambiando su forma, este cambio de forma es representado por el
vector de deformacin, el cual en un punto tiene seis componentes como se ve en la ecuacin
(20)
6
donde ?
x
, ?
y
, ?
z
son las deformaciones normales y ?
xy
, ?
yz
, ?
zx
son las deformaciones
tangenciales.
[ ]
[ ]
[ ]
[ ] [ ]
[ ] [ ]
[ ] [ ] 1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
]
1
32
1
32
1
32
1
32 1 32 1
32 1 32 1
32 1 32 1
32 1
32 1
32 1
:
:
:
......
0
......
...... ......
0
0
...... ......
......
0 0
0
......
0
0 0
......
w
w
v
v
u
u
x
N N
z
N N
y
N N
z
N N
x
N N
y
N N
z
N N
y
N N
x
N N
x
w
z
u
y
w
z
v
x
v
y
u
z
w
y
v
x
u
xz
yz
xy
z
y
x
(20)
Siendo en forma general:
(21)
6
Para Profundizar ms vase Cap. VII Anexos
[ ] [ ]
) 1 96 ( ) 96 6 ( ) 1 6 ( x x x
a B
[ ]
1
1
1
]
1
32
1
32 1
: ......
u
u
N N u [ ]
1
1
1
]
1
32
1
32 1
: ......
v
v
N N v
[ ]
1
1
1
]
1
32
1
32 1
: ......
w
w
N N w
MARCO TEORICO
30
Como se menciono anteriormente, la matriz [B] requiere una transformacin de coordenadas,
es aqu entonces donde se multiplicara por la inversa del Jacobiano.
2.5.2 Hacer cumplir la relacin fsica
Aplicando la ley de Hooke la matriz [D]
7
representa las propiedades mecnicas del material
de cada elemento, en el presente proyecto de grado se consideraran solo un caso; la
isotropa del material; y la anisotropa se deja para un estudio posterior. Es por consiguiente
que si el material del elemento en estudio es istropo se deber usar la ecuacin (23) y si por
el contrario es aniso trpico se usara la ecuacin (24).
(23)
Donde:
E = Modulo de elasticidad volumtrico del material
?v= Coeficiente de Poisson;
(24)
7
Para Profundizar ms vase Cap. VII Anexos
) 1 ( 2 +
E
G
( )
( )( )
( )
( )
( )
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
]
1
xz
yz
xy
z
y
x
xz
yz
xy
z
y
x
E
1 2
2 1
0 0 0 0 0
0
1 2
2 1
0 0 0 0
0 0
1 2
2 1
0 0 0
0 0 0 1
1 1
0 0 0
1
1
1
0 0 0
1 1
1
2 1 1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
]
1
xz
yz
xy
z
y
x
ZX
ZX YZ
ZX YZ XY
ZX YZ XY Z
ZX YZ XY Z Y
ZX YZ XY Z Y X
xz
yz
xy
z
y
x
G
G G
Si mtr i ca
G G G
G G G E
G G G E E
G G G E E E
1
1
1
1
1
1
15
14 10
13 9 6
12 8 5 3
11 7 4 2 1
MARCO TEORICO
31
Donde:
Ex, Ey, Ez = Mdulos de elasticidad, uno por cada direccin de los ejes
coordenados.
?
1
, ?
2
, ?
3
,. ?
15
= Quince coeficientes de Poisson
Gxy, Gyz, Gzx = Mdulos de elasticidad transversal, uno por cada plano coordenado.
Para expresar las tensiones en funcin de las deformaciones, se debe invertir la matriz que
determina las deformaciones en funcin de las tensiones y seguir un procedimiento matricial
similar al que se realizo para identificar el Jacobiano. La operacin analtica de la ecuacin
(23) fue sencilla, sin embargo la inversin analtica de la matriz de la ecuacin (24) resulta
muy compleja por tanto se debe realizar la inversin de la matriz a travs de una tcnica
numrica.
En forma general y sustituyendo la ecuacin (21) se puede expresar:
(25)
Como ya se menciono en la seccin anterior, se puede presentar tambin deformaciones
inciales debidos a cambios de temperatura, retraccin del material, cristalizacin, etc. si se
presentan dichas deformaciones la forma ms general estar dada por:
(26)
2.5.3 Hacer cumplir las condiciones de equilibrio
La ecuacin que representa el equilibrio entre las fuerzas nodales de equilibrio, la carga
repartida sobre el elemento y los desplazamientos nodales puede escribirse como:
) 1 ( ) 1 ( ) 1 ( ) 1 (
q f u K
(27)
Donde:
K
(1)
= matriz de rigidez.
u
(1)
= vector de desplazamientos nodales (representados por , ?, ?)
f
(1)
=vector de fuerzas nodales equivalentes.
q
(1)
= vector de fuerzas nodales de equilibrio del elemento.
[ ] [ ] [ ] [ ]
) 1 96 ( ) 96 6 ( ) 6 6 ( ) 1 6 ( x x x x
a B D [ ] [ ] [ ]
) 1 6 ( ) 6 6 ( ) 1 6 ( x x x
D
[ ] [ ] [ ] [ ]
O O
D +
MARCO TEORICO
32
Operando cuidadosamente es fcil llegar al sistema de ecuaciones global que, puede
escribirse en forma matricial como:
[ ] [ ] [ ] u K F
(28)
En esta seccin es importante recordar los Teoremas Energticos. La aplicacin de los
teoremas energticos se fundamenta en el hecho de simplificar el modelo matemtico, es
decir cambiar las ecuaciones de equilibrio (gobernadas por ecuaciones diferenciales) por las
ecuaciones de energa, esto por la complejidad de hacer cumplir las ecuaciones de equilibrio.
Ver grafico No 4.
Grafica No 4. Esquema teoremas energticos
Fuente: Elaboracin propia
En resumen podemos definir al principio de los trabajos virtuales
8
(PTV) cuando una
estructura bajo efectos externos esta en equilibrio, y si partimos de una configuracin
compatible se da un desplazamiento virtual y se encuentra que el trabajo virtual es igual a la
energa de deformacin virtual, entonces la estructura esta en equilibrio. Ver grafico No5.
Grafica No 5. Esquema teoremas energticos
Fuente: Elaboracin propia
8
La demostracin del PTV est bien ilustrada en el Cap. VII Anexos
Ener gi a
Ext er na
F * u
Ener gi a
Int er na
s* ?
ATAJO
Cambio de las Ecc. de Equ. por las Ecc.
Energeticas
(para no plantear las ecuaciones diferenciales)
SOLUCION (funcin
prueba que cumpla las 3
"F, G, E")
Relaciones fisicas
Relaciones geometricas
Ecuaciones de equilibrio
MARCO TEORICO
33
Para la obtencin de las ecuaciones de equilibrio, de la discretizacin partiremos de la
expresin del principio de los trabajos virtuales aplicada al equilibrio de un elemento aislado.
[ ]
) 96 6 ( ) 6 6 ( ) 6 96 ( ) 96 96 ( x x x x
dV B D B K
V
T
(29)
La ecuacin genrica de la matriz de rigidez de un elemento tridimensional en coordenadas
naturales, es por tanto:
[ ]
+
) (
1
1
1
1
1
1
) (
) , , ( ) , , (
e
j
T
i j
V
T
i
e
i j
J B D B dV B D B K
+
) , , (
1
1
1
1
1
1
i j
G
(30)
En la matriz G intervienen expresiones racionales por lo que su integracin analtica es
sumamente complicada y hay que recurrir a la integracin numrica.
2.6 INTEGRACIN NUMRICA
En la mayor parte de los elementos bi o tridimensionales isoparamtricos el clculo directo de
dichas integrales es inabordable, salvo algunas excepciones, y es imprescindible hacer uso de la
integracin numrica
9
.
Entrar en detalle en todos los fundamentos matemticos relacionados con la integracin
numrica se sale de los objetivos del presente proyecto de grado. A efectos de simplificar ideas
presentaremos aqu nicamente la integracin numrica de Gauss-Legendre, que fue el
mtodo que se utilizo en este estudio, por ser este el procedimiento ms popular y utilizado en
relacin con el mtodo de los elementos finitos.
) (
1
1
f I
(31)
9
La demostracin de la integracin numrica est bien ilustrada en el Cap. VII Anexos
MARCO TEORICO
34
La regla de la integracin de Gauss-Legendre expresa el valor de dicha integral como suma del
producto de los valores del integrando en una serie de puntos conocidos en el interior del
intervalo por unos coeficientes (pesos W) determinados. Es decir para una cuadratura de orden
p se obtiene que:
i i
p
i
W f I
) (
1
(32)
Donde:
Wi = peso correspondiente al punto de integracin i
p = el numero de dichos puntos
Es importante destacar que la cuadratura de Gauss-Legendre de orden n integra exactamente
un polinomino de grado 2n -1 o menor. Ver cuadro No3.
n ?S i Wi
1 0. 0 2. 0
2 0. 577 3502 692 1. 0
0. 774 5966 97 0. 5555 5555 6
0. 0 0. 8888 8888 9
0. 861 1363 116 0. 3478 5484 51
0. 339 9810 436 0. 6521 4515 49
0. 906 1798 459 0. 2369 2688 51
0. 538 4693 101 0. 4786 2867 05
0. 0 0. 5688 8888 89
0. 932 4695 142 0. 1713 2449 24
0. 661 2093 865 0. 3607 6157 30
0. 238 6191 861 0. 4679 1393 46
0. 949 1079 123 0. 1294 8496 62
0. 741 5311 856 0. 2797 0539 15
0. 405 8451 514 0. 3818 3005 05
0. 0 0. 4179 5918 37
0. 960 2898 565 0. 1012 2853 63
0. 796 6664 774 0. 2223 8103 45
0. 525 5324 099 0. 3137 0664 59
0. 183 4346 425 0. 3626 8378 34
3
8
7
6
5
4
Cuadro No 3 Coordenadas y pesos de cuadratura de Gauss-Legendre
(n, son los puntos de integracin)
Fuente: Texto C.E. por el M.E.F. Eugenio Oate
En el caso de las funciones de forma del elemento de treinta y dos nodos se tiene tres variables,
por tanto la integracin numrica ser de la siguiente forma:
MARCO TEORICO
35
k j i k j i
p
i
q
j
r
k
W W W f I
) , , (
1 1 1
(32)
Por lo tanto, de acuerdo con la ecuacin (30), el clculo de la matriz de rigidez de un elemento
hexadrico isoparamtrico seria:
+
1
1
1
1
1
1
) ( ) (
d d d J B D B dz dy dx B D B K
e
j
T
j
Ve
j
T
j
e
i j
[ ] [ ]
p q
r
p q
r
n
p
n
q
n
r
r q p
r q p
i j
n
p
n
q
n
r
r q p
r q p
e
j
T
j
W W W G W W W J B D B
1 1 1
, ,
1 1 1
, ,
) (
(35)
Donde:
n
p
, n
q
, n
r
= nmero de puntos de integracin en cada una de las direcciones ? , ? , ?
?
p
, ?
q
, ?
r
= coordenadas del punto de integracin (p, q, r)
W
p
, W
q
, W
r
= Pesos correspondientes a cada direccin natural asociados a dicho
punto
G
ij
=Se dio en la ecuacin (30)
Deacuerdo al cuadro No 3 las coordenadas de los puntos de integracion para n =3 en un
elemento de treinta y dos nodos seria el mostrado en el grafico N
o
6.
Grafica No 6. Puntos de integracion
Fuente: Elaboracin propia
MARCO TEORICO
36
2.7 ENSAMBLE DE LA ESTRUCTURA
Para tener la solucin completa se han de satisfacer en toda ella dos condiciones de:
- Compatibilidad de los desplazamientos
- Equilibrio en los nodos.
Como las condiciones generales de equilibrio ya son satisfechas dentro de cada elemento, solo
nos queda establecer las condiciones de equilibrio en los nodos de la estructura. Las
ecuaciones que resulten contendrn los desplazamientos como incgnitas y una vez calculados
estos el problema quedara completamente resuelto. El ensamble de la estructura se explicara
con mayor claridad con el siguiente ejemplo sencillo de una cercha.
En la grafica No7 se muestra una cercha con elementos barras de dos nodos y en cada nodo se
tiene dos grados de libertad, uno en cada direccin, seguidamente se presenta la matriz de
rigidez de el elemento 1 y 2, y se indicara con flechas como se realiza el ensamble utilizando el
cuadro No4.
1
1
1
1
]
1
1
1
1
1
1
]
1
1
1
1
1
1
]
1
1
1
1
1
1
]
1
4
3
2
1
1
4
1
3
1
2
1
1
1
44
1
43
1
42
1
41
1
34
1
33
1
32
1
31
1
24
1
23
1
22
1
21
1
14
1
13
1
12
1
11
1
4
1
3
1
2
1
1
*
K K K K
K K K K
K K K K
K K K K
Li
Ai Ei
F
F
F
F
1
1
1
1
]
1
1
1
1
1
1
]
1
1
1
1
1
1
]
1
1
1
1
1
1
]
1
6
5
4
3
2
4
2
3
2
2
2
1
2
44
2
43
2
42
2
41
2
34
2
33
2
32
2
31
2
24
2
23
2
22
2
21
2
14
2
13
2
12
2
11
2
2 2
4
2
3
2
2
2
1
K K K K
K K K K
K K K K
K K K K
L
A E
F
F
F
F
Grafica No 7. Esquema cercha
Fuente: Elaboracin propia
Se realiza el ensamble de la matriz de rigidezdel elemento 2, su sub valor K
2
13
:
1
2
3
6
5
2
1
4
3
y
x
y
x y
x
1
2
3
(x ,y )
3 3
(x ,y )
1 1
(x ,y )
2 2
MARCO TEORICO
37
K
2
1 3
Cuadro No 4. Ensamble de matriz de rigidez cercha
Fuente: Texto C.E. por el M.E.F. Eugenio Oate
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
]
1
+ +
+ +
+ +
+ +
+ +
+ +
1
1
1
1
1
1
1
]
1
6
5
4
3
2
1
2
44
3
44
2
43
3
43
2
42
2
41
3
42
3
41
2
34
3
34
2
33
3
33
2
32
2
31
3
32
3
31
2
24
2
23
2
22
1
44
2
21
1
43
1
42
1
41
2
14
2
13
2
12
1
34
2
11
1
33
1
32
1
31
3
24
3
23
1
24
1
23
1
22
3
22
1
21
3
21
3
14
3
13
1
14
1
13
1
12
3
12
1
11
3
11
6
5
4
3
2
1
K K K K K K K K
K K K K K K K K
K K K K K K K K
K K K K K K K K
K K K K K K K K
K K K K K K K K
EA
R
R
R
R
R
R
De forma anloga se realizo el ensamble en el programa desarrollado.
2.8 APLICAR LAS CONDICIONES DE BORDE
El sistema de ecuaciones que resulta de la ecuacin (28) puede resolverse una vez sustituidos
los desplazamientos impuestos en los apoyos, lo cual reduce indirectamente el nmero de
ecuaciones de equilibrio. Es obvio que sin sustituir un nmero mnimo de desplazamientos,
obligados para impedir que la estructura se mueva como un slido rgido, pues los
desplazamientos no pueden quedar unvocamente determinados por las fuerzas y habr infinitas
soluciones para un sistema de fuerzas dado. Este hecho, fsicamente evidente, debe
interpretarse matemticamente en razn de que la matriz K, al ser singular, carece de inversa.
2.9 CARGAS NODALES EQUIVALENTES
Como ya se menciono anteriormente, se pueden considerar efectos de distintos tipos de acciones
en el anlisis, estas acciones estn asociadas en cada elemento y se incluyen en el clculo por
medio de cargas concentradas aplicadas en los nodos del mismo.
a) Peso propio
El clculo de los vectores de fuerzas nodales equivalentes est dado por la ecuacin (36), y
el proceso de integracin numrica sobre el volumen del elemento se efecta de manera
idntica a la matriz de rigidez K gobernada por la ecuacin (35)
1 2 3
1 1 3 1
2 2 4 2
3 3 5 5
4 4 6 6
Elem ent os
Direcciones
MARCO TEORICO
38
+
1
1
1
1
1
1
) ( ) (
d d d J b N dz dy dx b N f
e T
i
Ve
T
i
e
i
[ ]
p q
r
n
p
n
q
n
r
r q p
r q p
e T
i
W W W J b N
1 1 1
, ,
) (
(36)
b) Cargas uniformes distribuidas
El caso de las fuerzas actuando sobre una de las caras del elemento es algo ms
complicado. Para expresar el proceso consideremos que acta una fuerza tn ortogonal a la
cara situada (ver imagen No 14) ?= +1 y definida por los nodos 5 al 8, para el clculo del
vector de fuerzas de superficie precisamos conocer el termino t dA (ver ecc. 39), donde dA
es el diferencial de rea en dicha cara, y t el vector de fuerzas en ejes globales actuantes
sobre la superficie en cuestin. As, si nx, ny, nz son los cosenos de la forma a la superficie,
se tiene que: t= tn n con n = [nx, ny, nz]
El vector normal n se obtiene como producto vectorial de dos vectores tangenciales a las
lneas ?2= ctte y ?2= ctte contenidas en la superficie. As:
,
_
+ 1
1
k
z
j
y
i
x
V
v v
(37)
,
_
+ 1
2
k
z
j
y
i
x
V
v v
(38)
Imagen No 14. Fuerza de superficie normal a una cara de un elemento hexadrico
Fuente: Texto C.E. por el M.E.F. Eugenio Oate
MARCO TEORICO
39
Se deduce de las ecuaciones (38 y 37) que las componentes de V
1
, V
2
se obtienen de la
primera y segunda fila de la matriz del Jacobiano, donde el vector normal unitario es:
(39)
Y recordando que
2 1
V x V dA
, se t i ene que:
'
) (
) (
12 21 32 11
23 11 13 21
13 22 23 12
1 1
e
e
j
dA
J J J J
J J J J
J J J J
dA
n
(40)
Por consiguiente, la expresin final del vector de fuerzas de superficie es:
+
d d J n t N dA n t N f R
e
n i
A
n i
e
ti
e
A
) (
1
1
1
1
) (
[ ]
p q
n
p
n
q
q p q p n
e T
i
W W t J N
1 1
,
) (
(41)
Las expresiones (35), (36) y (41) son la base para la elaboracin de las subrutinas
correspondientes a un programa de ordenador de elementos tridimensionales.
Adicionalmente y si el lector lo considera necesario puede aplicar los siguientes tipos de
cargas:
a) Fuerzas inerciales o de volumen
[ ] d d d J f dV f R
e e
v
T
V
e v
T
V
e e
v
) det(
(42)
96x1 96x3 3x1
b) Fuerzas por deformacin inciales
[ ] d d d J D B dV D B R
e
T
V
e e
T
V
e e
D
) det(
0 0
(43)
96x1 96x6 6x6 6x1
c) Fuerzas por tensin inciales
[ ] d d d J B dV B R
e
T
V
e e
T
V
e
T
) det(
0 0
(44)
96x1 96x6 6x1
2 1
2 1
V x V
V x V
n
MARCO TEORICO
40
Para evaluar estas ecuaciones se utilizaran tcnicas de integracin numrica, por lo que fue
necesario expresar las diferenciales de volumen y superficie en trminos de las coordenadas
normalizadas a travs del determinante del Jacobiano.
2.10 RESOLUCIN DEL SISTEMA
Existen muchas tcnicas para resolver el sistema de ecuaciones K u = f resultante del
ensamblaje de las ecuaciones de equilibrio de los diferentes elementos, entre los procedimientos
ms importantes podemos citar:
Mtodos directos, como:
Eliminacin Gaussiana
Mtodo frontal
Reduccin de Choleski
Reduccin de Crout
Mtodo del perfil.
Mtodos iterativos
Mtodo iterativo de Gauss-Seidel
Mtodos de gradiente conjugado
Mtodos de relajacin
La descripcin detallada de estos mtodos puede encontrarse en la mayora de libros de clculo
numrico, aqu se empleo el mtodo que se describe a continuacin, por ser quizs el ms
sencillo y fcil de implementar en un programa de elementos finitos.
El mtodo desarrollado se basa principalmente en adicionar elementos ficticios muy rgidos, y al
adicionarlos estamos colocando un valor infinito en la diagonal principal. Ver grafica No 8
Grafica N
o
8. Esquema solucin del sistema
Fuente: Elaboracin propia
2
1
3
4
5
6
elementos
ficticios
MARCO TEORICO
41
La matriz de rigidez original [K] por ser una matriz singular no tiene inversa, sin embargo, en el
momento que estamos adicionando los elementos ficticios en los apoyos, los valores en los
nodos de apoyo de la diagonal principal de la matriz de rigidez se los cambia por valores
relativamente muy grandes con el fin de representar el infinito, esta accin resulta en una nueva
matriz [K
X
] la cual si se puede invertir. Por tanto podemos seguir el proceso que se presenta a
continuacin.
[K] [K
x
] (45)
[u] = [K
*
]
-1
* [F] (46)
[F
x
] = [K] * [u] (47)
Con la ecuacin (46) se determina una de las tres principales incgnitas, que son los
desplazamientos, y para el clculo de las reacciones se debe aplicar primeramente la ecuacin
(47) en la que se obtienen todas las fuerzas que actan sobre el elemento, sin embargo a en
este punto solo nos interesa las reacciones, es por eso que se debe aplicar la ecuacin (48) para
la obtencin de las reacciones.
[R] = [F
x
] - [F] (48)
2.11 ANLISIS COMPLEMENTARIO
2.11.1 Calculo de tensiones.
Las tensiones se calculan inicialmente en los puntos de integracin y a partir de dichos
valores se procede a su extrapolacin a los nodos. As, las tensiones en el punto de Gauss p
se obtiene por:
( )
n
i
i p i p
a DB
1
(49)
Recordemos que durante el clculo de la matriz de rigidez K se evala el punto (D*B) en cada
punto de Gauss, almacenando la matriz resultante en un fichero, juntamente con las
coordenadas cartesianas de los puntos de Gauss. Por lo tanto, para efectuar las operaciones
de la ecuacin (45) basta con leer para cada elemento la informacin almacenada en dicho
fichero, evitando el clculo repetitivo de las matrices B y D en cada punto de Gauss.
CAPITULO III:
MARCO PRACTICO
CAPTULO III
3.1 PROGRAMA COMPUTACIONAL DE APLICACIN
Una de las etapas ms importantes del mtodo de los elementos finitos es la aplicacin al clculo
de las estructuras, implementando la teora en un programa de ordenador.
mercado existe una variedad de programas que con los aos han i
eficacia para obtener soluciones de forma ms econmica y competitiva.
conocidos en el mercado son: CYPE ingenieros, SAP 2000 Integrated Software, ROBOT
Structural Analysis, ADINA SYSTEM
en la grafica No 9.
3.1.1 CARACTERISTICAS DEL PROGRAMA.
En este captulo se presenta una descripcin del programa para clculo de slidos y
por el mtodo de los elementos finitos con detalles de las subrutinas ms relevantes del mismo.
El programa est escrito en
caractersticas generales:
Etapa 1. Caracteristicas
Programa (seleccion del
Etapa 2. Discretizacion
estructura en E. F.
Etapa 3. Entrada de datos
Etapa 4. Calculo de
Rigidez de los elementos
Etapa 5. Calculo del
fuerzas nodales
Etapa 6. Solucion del
ecuaciones global.
Etapa 7. Calculo de las
43
PROGRAMA COMPUTACIONAL DE APLICACIN
Una de las etapas ms importantes del mtodo de los elementos finitos es la aplicacin al clculo
de las estructuras, implementando la teora en un programa de ordenador.
mercado existe una variedad de programas que con los aos han ido adquiriendo versatilidad y
eficacia para obtener soluciones de forma ms econmica y competitiva.
conocidos en el mercado son: CYPE ingenieros, SAP 2000 Integrated Software, ROBOT
ADINA SYSTEM. El mtodo consta de las etapas bsicas
Grafica No9: Esquema general de las etapas bsicas
Fuente: Elaboracin propia
CARACTERISTICAS DEL PROGRAMA.
En este captulo se presenta una descripcin del programa para clculo de slidos y
por el mtodo de los elementos finitos con detalles de las subrutinas ms relevantes del mismo.
El programa est escrito en el lenguaje VISUAL-BASIC 2010
Tipologia de la estructura - Caracteristicas del material
Presicin buscada - Tipos de Cargas
Caracteristicas del
del elemento)
Numeracin de los nodos de la malla
Numeracin de los elementos
Discretizacion de la
Parametros de Control - Condiciones de contorno
Datos geometricos - Propiedades del material
datos
Calcular la Matriz de Rigidez K
(e)
la Matriz de
elementos
Cargas exteriores consideradas -
Fuerzas nodales equivalentes y repartidas
del vector de
Ensamblaje
Reduccion
del sistema de
Puntos de integracion
Extrapolacion a los nodos
las tensiones.
MARCO PRCTICO
Una de las etapas ms importantes del mtodo de los elementos finitos es la aplicacin al clculo
de las estructuras, implementando la teora en un programa de ordenador. Cabe recordar que en
do adquiriendo versatilidad y
eficacia para obtener soluciones de forma ms econmica y competitiva. Los programas ms
conocidos en el mercado son: CYPE ingenieros, SAP 2000 Integrated Software, ROBOT
sta de las etapas bsicas que se muestra
Esquema general de las etapas bsicas
En este captulo se presenta una descripcin del programa para clculo de slidos y estructuras
por el mtodo de los elementos finitos con detalles de las subrutinas ms relevantes del mismo.
y presenta las siguientes
Caracteristicas del material
Tipos de Cargas
Numeracin de los nodos de la malla
Condiciones de contorno
Propiedades del material
- Fuerzas distribuidas
Fuerzas nodales equivalentes y repartidas
MARCO PRCTICO
44
Caractersticas del material.
- Material elstico lineal istropo.
Tipologas de estructuras abordables.
- Slidos tridimensionales (Cdigo programado)
- Estructuras en deformacin plana (Cdigo a ser programado por el lector)
- Estructuras en tensin plana (Cdigo a ser programado por el lector)
- Slidos de revolucin (Cdigo a ser programado por el lector)
- Placas (teora de Reissner-Mindlin) (Cdigo a ser programado por el lector)
- Laminas de revolucin (Cdigo a ser programado por el lector)
Elementos utilizables
En este punto cabe aclarar que el programa actualmente cuenta solamente con el elemento
tridimensional isoparamtrico serendpito de treinta y dos nodos, sin embargo el lector podr
adicionar al programa los elementos isoparamtricos siguientes:
Tipologia Elemento
Tension y deformacin plana:
Slidos de revolucin:
Solidos tridimensionales:
Placas:
Laminas de revolucion:
Elemento troncocnico de dos nodos de Reissner-
Mindiln
-Elementos triangulares de tres y seis nodos
Elementos cuadrilateros lagrangianos de 4 y 9 nodos
Elemento cuadrilatero serendpito de 8 nodos
Los mismos que para tension y deformacion plana
Elemento hexagonal serendpito de 20 nodos
Elemento cuadrilatero de 4 nodos CLLL
Tipo de cargas
Para los problemas se admiten cargas estticas de los tipos siguientes:
MARCO PRCTICO
45
Problema Tipos de cargas
Tension y deformacion plana Cargas puntuales nodales
Slidos de revolucin Peso propio
Solidos tridimensionales Cargas puntuales nodales
Peso propio
Placas y lminas de revolucin Cargas puntuales nodales
Peso propio
Cargas uniformemente repartidas sobre los lados
de los elementos
Cargas uniformemente repartidas sobre las caras
de los elementos
Cargas uniformemente repartidas sobre un lado del
elemento
Los elementos y cargas consideradas son planteadas por ser las ms sencillas y eficaces, sin
embargo, una vez familiarizado el lector con los detalles del programa podr modificarlo
fcilmente para poder incluir otros tipos de elementos y cargas.
3.2 ORGANIZACIN GENERAL DEL PROGRAMA
Como se ilustro en el grafico No 9, la organizacin general del programa cuenta con 6 etapas, las
cuales se detallan a continuacin, pero previamente y para centrar los conceptos el grafico No10
muestra el diagrama de flujo principal del programa.
Grafico No10: Diagrama de flujo principal del programa.
Fuent e: El abor aci n pr opi a
DATOS
RIGIDEZ [ K]
BUCLE SOBRE LOS ESTADOS DE CARGA
FUERZAS
SOLUCION
TENSIONES
MARCO PRCTICO
46
Etapa 1: Seleccin del tipo del elemento.
La seleccin del elemento es funcin de la tipologa de la estructura y la precisin buscada.
Una vez escogido el elemento que se ajuste a las necesidades del problema, quedan
definidas sus funciones de forma.
Etapa 2: Discretizacin de la estructura en elementos finitos.
Esta etapa puede presentar un porcentaje alto del esfuerzo total de clculo si la geometra de
la estructura es compleja. En ella hay que definir las coordenadas de los nodos, las
propiedades de cada elemento y las condiciones de contorno, cabe mencionar la importancia
de la correcta numeracin de los nodos de la malla y la numeracin de los elementos.
Etapa 3: Entrada de datos.
Esta etapa consiste en realizar una lectura de los datos necesarios para resolver el problema.
Etapa 4: Calculo de la matriz de rigidez de los elementos.
En la etapa siguiente se calculan las matrices de rigidez [K] de cada uno de los elementos de
la malla.
Etapa 5: Calculo del vector de fuerzas nodales equivalentes.
Esta etapa calcula el vector de fuerzas nodales equivalentes [F] para cada elemento
Etapa 6: Solucin del sistema de ecuaciones global.
Una vez determinada la matriz de rigidez y el vector de fuerza nodales equivalentes la etapa
siguiente es el ensamble de dichas matrices y vectores f = K*u, y su solucin para obtener los
desplazamientos y las reacciones.
Etapa 7: Anlisis complementario.
La etapa final consiste en calcular las tensiones en los diferentes elementos en cada punto de
integracin, a partir de los valores de los movimientos nodales.
3.2.1 Tipos de variables
Antes de desarrollar los tipos de variables, es conveniente indicar la metodologa con la que
se trabajo al realizar el programa con el lenguaje Visual Basic 2010. Bsicamente para la
introduccin de datos en Visual Basic 2010 se utilizan diferentes formularios, la cantidad de
los mismos depender de los grupos de datos necesarios para resolver el problema, adems
MARCO PRCTICO
47
se utiliza un formulario principal (formulario men) a travs del cual se puede acceder a los
diferentes formularios. Entonces, dentro del cdigo de programacin de un formulario se
llaman a diferentes sub rutinas funciones las cuales estn almacenadas en mdulos, para
una mejor comprensin. Ver grafica No 11.
Grafico No11: Esquema de interaccin de formularios y mdulos
Fuent e: El abor aci n pr opi a
Las variables utilizadas en el programa, pueden ser clasificadas de varias formas. Para una
mejor lectura del cdigo de programacin se los clasifica de la siguiente manera:
Variables pblicas, semi-privadas y privadas.
Son aquellas que se utilizan en varios formularios y mdulos, y son declaradas como
Public.
Denominaremos como variables semi-privadas a aquellas que son reconocidas en todas
las sub rutinas o funciones de un formulario un modulo, y se las declara como Dim al
inicio.
Definiremos como privadas a las variables que solamente son reconocidas dentro de una
sub rutina o una funcin, ya sea si la funcin o sub rutina esta en el formulario o en un
modulo, estas son declaradas como Dim por la sub rutina o funcin con un Byval.
Variables por el tipo de dato a almacenar.
En el programa los tipos de datos que se almacenan son: Valores constantes o variables
del tipo entero y doble, matrices y vectores con dimensiones definidas, y Objetos, los
cuales normalmente almacenan matrices de dimensiones desconocidas.
Variables auxiliares temporales.
Formulario Men
Formulario A
Modulo 1
Modulo 2
Formulario B
Formulario C
Modulo 3
MARCO PRCTICO
48
Estas variables no sern explicadas a detalle debido a que realizan operaciones de
interaccin con el usuario, como la exportacin importacin de datos.
3.2.2 Seleccin de los nombres de las variables
Para obtener una buena programacin se mantuvo un criterio para escoger los nombres de
las variables del programa, salvo algunas excepciones. En el presente programa se trat que
el nombre de cada una de estas variables este lo ms relacionado posible con su funcin en
el programa, por otra parte todas las variables que empiezan con la letra:
- n indica nmero de
- m indica matriz de
- v indica vector de (es un vector, se refiere que son los valores de un elemento
especifico)
- i, j, k indica un valor determinado de la variable
- c indica constante de parmetro de
- M indica matriz resultado de
Adicionalmente todas las variables que terminen con la letra:
- S indica Sub rutina
- F indica Funcin
- B indica Valor de entrada
Estas normas pueden resultar algo tediosas, no obstante, su estricto cumplimiento ser de
utilidad para el estudio, utilizacin y posterior modificacin por el lector.
3.2.3 Transmisin de informacin entre subrutinas
En el presente programa se dise trece formularios y siete mdulos para operar toda la
informacin. A continuacin se presenta un diagrama en la grafico No 12, el cual indica la
interaccin de las pestaas del men principal con los formularios de dialogo.
MARCO PRCTICO
49
Grafico No12: Diagrama de interaccin de formularios y acciones a realizar.
Fuente: Elaboracin propia
3.2.4 Men principal: Men
En el formulario Men, se desgloso unas pestaas, las que permiten seleccionar el tipo de
accin a realizar, abriendo un nuevo formulario de dialogo o elementos de seleccin para
visualizar los datos ya introducidos visualizar los resultados. Ver grafico No 13.
Grafico No13: Formulario principal Men.
Fuente: Elaboracin propia
M ENU
DATOS
Pr opi edades del m at er i al
Ti pol oga
Dat os geom et r i cos
Condi ci ones de cont or no
CARGAS
Est ados de Car ga
Car gas Nodal es
Car gas Di st r i bui das
VER
Ver Dat os
Ver Car gas
CALCULOS Cal cul ar
VER
RESULTADOS
Tensi ones,Despl azam i ent os,
Reacci ones y Coor pt os
i nt egr aci on
MARCO PRCTICO
50
El cdigo de programacin desarrollado en el formulario Men, se enfoco principalmente en
las siguientes acciones:
- Llamar a otros formularios de dialogo
- Controlar la habilitacin inhabilitacin de los formularios de dialogo, es decir, si los
datos de un formulario de dialogo estn incompletos entonces no se habilitara la
utilizacin del siguiente formulario.
- Muestra datos o resultados en una tabla y adems permite exportar los resultados.
3.3 ENTRADA DE DATOS: PESTAA Datos
La pestaa DATOS se diseo de tal forma que lea toda la informacin relacionada con la
geometra de la malla y las propiedades de los materiales. Los formularios y los mdulos
utilizados para realizar las operaciones de lectura de datos estn organizados de manera que
sirva para cualquier problema de estructuras ya sea analizado con elementos bi
tridimensionales, adems, el cdigo de programacin desarrollado en cada uno de los
formularios de dialogo para la introduccin de datos, se basa fundamentalmente en la
ordenacin de los datos y su posterior almacenamiento en variables o matrices para su posterior
operacin.
3.3.1 Tipologa del problema: Tipologa
El formulario de dialogo permite seleccionar el tipo de problema que se va a resolver y el
elemento a ser usado, pero en el presente proyecto de grado solo se ha desarrollado el
elemento tridimensional isoparamtrico de 32 nodos, sin embargo, dentro del cdigo de
programacin se ha dejado espacios para la adicin de otros elementos, adems de una
explicacin detallada para una mejor implementacin de los nuevos elementos. Ver grafico
No14.
Este formulario leer el tipo de problema y elemento a ser analizado, por consiguiente los
datos a leer son: nTiPro / nDime / nTens / nGdln / nNodo / nNeva, estas variables son
definidas como pblicas.
MARCO PRCTICO
51
Grafico No14: Formulario de dialogo. Tipologas
Fuente: Elaboracin propia
3.3.2 Propiedades del material: Materiales
En este formulario se leern los datos necesarios para conformar la matriz constitutiva [D].
Estas propiedades se ingresan atreves de un formulario de dialogo, el cual esta enlazado a
una base de datos donde se tiene almacenado algunos de los materiales ms comunes, sin
embargo, el usuario puede eliminar y adicionar nuevos materiales. Ver grafico No 15.
Grafico No15: Formulario de dialogo. Base de datos de los materiales
Fuente: Elaboracin propia
MARCO PRCTICO
52
3.3.3 Datos geomtricos: Geometra
La introduccin de la geometra del problema a resolver se puede realizar mediante tres
opciones:
- La primera es introducir los datos de forma manual.
- La segunda opcin es introducir los datos importndolos de una hoja Excel.
- La tercera es introduciendo los datos de manera automtica.
Si bien una de las grandes ventajas de la tercera opcin es la reduccin del tiempo de
introduccin de datos, su desventaja radica en que solamente genera elementos
paraleleppedos, y todos los elementos tienen la misma dimensin. Ver grafico No 15.
a) Introduccin manual y por importacin b) Generacin automtica de la malla
Grafico No16: Formulario de dialogo de la geometra.
Fuente: Elaboracin propia
3.3.4 Condiciones de contorno
Las condiciones de contorno se ingresan a travs de un formulario de dialogo, en el cual para
los nodos requeridos se debe indicar si presenta o no restricciones en x, y, z. Ver grafico
No17.
MARCO PRCTICO
53
Grafico No17: Formulario de dialogo. Condiciones de contorno
Fuente: Elaboracin propia
3.4 ENTRADA DE CARGAS: SUB-MENU CARGAS
3.4.1 Estados de carga
En este formulario de dialogo se introduce el numero de estados de carga del problema, y si
estos van a considerar o no el peso propio. De la misma manera que las sub-rutinas DATOS
estas subrutinas son de lectura de informacin, por tanto su cdigo se enfoca en el
ordenamiento y almacenamiento de los datos en variables para su posterior operacin. Ver
grafico No 18.
Grafico No18: Formulario de dialogo. Estados de carga.
Fuente: Elaboracin propia
MARCO PRCTICO
54
3.4.2 Fuerza en los nodos
En este formulario de dialogo se selecciona el estado de carga en el que se aplican las
cargas. Los datos se pueden introducir en forma manual o importarlos desde una hoja Excel.
Su cdigo de programacin es de ordenamiento y almacenamiento, este proceso se lo realiza
con la ayuda de una sub-Funcin fPuntF almacenada en el modulo moDatos. Ver grafico
No19
Grafico No19. Formulario de dialogo. Fuerzas puntuales en los nodos.
Fuente: Elaboracin propia
3.4.3 Fuerzas distribuidas
De la misma manera que en las fuerzas nodales, en este formulario se realiza un proceso de
lectura y almacenamiento de las variables para su posterior operacin. Ver grafico No 20.
Grafico No20: Formulario de dialogo. Fuerzas distribuidas sobre las caras del elemento.
Fuente: Elaboracin propia
MARCO PRCTICO
55
3.5 VER DATOS Y CARGAS
En estas pestaas se pueden observar los datos y cargas ingresadas. Esta accin se lo ha
dispuesto con el fin de mostrar los datos y poder detectar cualquier error o incongruencia antes
de proceder al clculo. Por lo tanto se recomiendo al lector revisar los datos ingresados antes de
proceder con el clculo del problema.
3.6 CALCULAR
La accin calcular realiza las operaciones ms importantes del programa. Todos los conceptos
vistos en el capitulo II y el proceso de la grafica No9, esta desarrollado a continuacin.
3.6.1 Listado de la Rutina principal CALCULAR
222
Private Sub CalcularToolStripMenuItem_Click(ByVal sender As
System.Object, ByVal e As System.EventArgs) Handles
CalcularToolStripMenuItem.Click
224
If MessageBox.Show("Desea calcular", "CALCULAR",
MessageBoxButtons.YesNo, _
225
MessageBoxIcon.Question) = Windows.Forms.DialogResult.Yes
Then
227 MsgBox("Este proceso puede tardar varios minutos")
228 ReDim MReacE(nEsCar)
229 ReDim MDespE(nEsCar)
230 ReDim MTensE(nEsCar)
231 'CALCULA LA MATRIZ DE RIGIDEZ DE CADA ELEMENTO
232 Call RigiMatS()
234 'ENSAMBLA LAS MATRICES DE RIGIDEZ
235 Call EnsamblaKS()
237 'BUCLE PARA RESOLVER LOS DISTINTOS ESTADOS DE CARGA
238 For iEsCar = 1 To nEsCar
239 Call FuerzaS(iEsCar)
240 Call EnsamblaFS(iEsCar)
241 Call ResolverS(iEsCar)
243 MReacE(iEsCar) = MReacT
244 MDespE(iEsCar) = MDespT
245 Next iEsCar
246 MsgBox("Calculo terminado")
247 End If
249 End Sub
MARCO PRCTICO
56
3.6.2 Matriz De Rigidez: Subrutina RIGIMAT
Esta sub rutina sigue los procesos indicados en el diagrama de flujo mostrado en la grafica No21,
representando bsicamente la expresin de la matriz de rigidez dada por la ecuacin (35).
[ ]
p q
r
n
p
n
q
n
r
r q p
r q p
i j
Ve
j
T
j
e
i j
W W W G dz dy dx B D B K
1 1 1
, ,
) (
(35)
Grafico No21: Diagrama de flujo del programa.
Fuente: Elaboracin propia
Recuper a pr opi edades geom et r i cas y mecani cas de cada el em ent o
- Cal cul a mat r i z D DM at S
Cal cul a l as f unci ones de f or m a Ni y sus der i vadas nat ur al es
en cada punt o de i nt egr aci on FFormaF
Cal cul a l as coor denadas car t esi anas, J
(e)
,[ J]
(e)
,[ J
(e)
]
-1
y l as der i vadas
en cada punt o de i nt egr aci on JacobS
Cal cul a l a m at r i z de def or m aci on [ B] en c/ pt o de i nt egr aci n BM at S
cal cul a el pr oduct o DB en cada punt o de i nt egr aci on BM at S
cal cul a K
i j
(e)
= K
i j
(e)
+ B
T
(DB) det J
( e)
W
p
W
q
W
r
def i ne S
(e)
= DB par a post er i or eval uaci on de t ensi ones en l os
punt os de i nt egr aci n
Al m acena K
(e)
y S
(e)
en una var i abl e par a uso post er i or en l as
subr ut i nas SOLUCION Y TENSIONES r espect i vam ent e
Bucle sobre todos los elementos
Bucle sobre los puntos de integracin
3 ; ; 1
3 ; ; 1
3 ; ; 1
r
q
p
n to r
n to q
n to p
i i i
N N N
, ,
z
N
y
N
x
N
i i i
, ,
MARCO PRCTICO
57
3.6.2.1 Listado de subrutina RIGIMAT
En esta seccin se presentara la lista de la programacin en Visual estudio con comentarios y
explicaciones que facilitan su implementacin y posterior edicin.
1 Module moRigiMat
2 '***********************************************
3 '* Calcula Matriz de Rigidez de cada elemento *
4 '***********************************************
6 Dim DMatZ(,) 'Matriz D
7 Dim BMatz(,) 'Matriz B
8 Dim DBMatz(,) 'Multiplicacin de la Matriz D*B
9 Dim mDCart(,) 'Derivadas cartesianas de las funciones de forma
10 Dim mCorpg(,) 'Matriz de coordenadas de los puntos de integracin
11
12 Sub RigiMatS()
13 Dim mRigid(nNeva, nNeva)
14 Dim mTenz(nTens, nNeva, nGauss ^ 3) 'Tensiones elementales
15 'en cada punto de integracin
16 Dim KpGauss As Integer 'es un contador
17 Dim eXisp As Double
18 Dim eNasp As Double
19 Dim eGasp As Double
20 Dim dVolu As Double
21 Dim fForma, dfForma
22 ReDim mCoRel(nNodo, nDime)
23 ReDim oKelem(nElem)
24 ReDim oTenEl(nElem)
25
26 '* BUCLE SOBRE CADA ELEMENTO
27 For iElem = 1 To nElem
28 KpGauss = 0
29 'MATERIAL
30 For i = 1 To 3
31 vMaEl(1, i) = mTMaEl(iElem, i + 2)
32 Next i
33
34 'COORDENADAS DE LOS PUNTOS NODALES DEL ELEMENTO
35 For iNodo = 1 To nNodo
36 lNodo = iNodo + nNodo * (iElem - 1)
37 For iDime = 1 To nDime
38 mCoRel(iNodo, iDime) = mCoRelT(lNodo, iDime + 1)
MARCO PRCTICO
58
39 Next iDime
40 Next iNodo
42 ' CALCULA LA MATRIZ CONSTITUTIVA D
43 Call DMatS()
44
45 'INICIALIZA LA MATRIZ DE RIGIDEZ ELEMENTAL
46 For iNeva = 1 To nNeva
47 For jNeva = 1 To nNeva
48 mRigid(iNeva, jNeva) = 0
49 Next jNeva
50 Next iNeva
51
52 'BUCLE PARA LA INTEGRACION NUMERICA
53 'realizar un select case
55 For iGauss = 1 To nGauss
56 For jGauss = 1 To nGauss
57 For kGauss = 1 To nGauss
58
59 KpGauss = KpGauss + 1
61 eXisp = CuGaLe3(1, iGauss)
62 eNasp = CuGaLe3(1, jGauss)
63 eGasp = CuGaLe3(1, kGauss)
65 fForma = FFormaF(eXisp, eNasp, eGasp)
66 dfForma = dFFormaF(eXisp, eNasp, eGasp)
67
68 Call JacobS(iElem, KpGauss, fForma, dfForma)
70 dVolu = dJacb * CuGaLe3(2, iGauss) * _
71 CuGaLe3(2, jGauss) * CuGaLe3(2, kGauss)
73 Call BMatS()
74 Call DBMatS()
75
76 For iEvab = 1 To nNeva
77 For jEvab = iEvab To nNeva
78 For iTens = 1 To nTens
79 mRigid(iEvab,jEvab) = mRigid(iEvab,jEvab) + _
80 BMatz(iTens,iEvab)* DBMatz(iTens,jEvab)* dVolu
81 Next iTens
82 Next jEvab
83 Next iEvab
84
86 For iTens = 1 To nTens
87 For iEvab = 1 To nNeva
MARCO PRCTICO
59
88 mTenz(iTens, iEvab, KpGauss) = DBMatz(iTens, iEvab)
89 Next iEvab
90 Next iTens
91
92 Next kGauss
93 Next jGauss
94 Next iGauss
95
96 'CALCULO DE LA PARTE TRIANGULAR INFERIOR DE LA MATRIZ DE RIGIDEZ
97 For iEvab = 1 To nNeva
98 For jEvab = iEvab To nNeva
99 mRigid(jEvab, iEvab) = mRigid(iEvab, jEvab)
100 Next jEvab
101 Next iEvab
102
103 'ALMACENA LA MATRIZ DE RIGIDEZ ELEMENTAL
104 oKelem(iElem) = mRigid
105 oTenEl(iElem) = mTenz
106 Next iElem
107 End Sub
3.6.2.2 Listado de las subrutinas auxiliares
En esta seccin se detalla la lista de la programacin en Visual estudio con comentarios y
explicaciones que facilitaran su implementacin y posterior edicin.
109 #Region "OPERACIONES AUXILIARES RIGIMAT"
A) Funcin de cuadraturas de Gauss Legendre.
Los valores de la cuadratura estn detallados en el cuadro No 3 del captulo II. La integracin
en el presente proyecto de grado se lo realizo con tres puntos de integracin en cada
direccin (n=3).
111 #Region "CUADRATURAS DE GAUSS LEGENDRE"
113 '******************************************************
114 '* ESTAS FUNCIONES PROPORCIONAN LOS PESOS Y ABSCISAS *
115 '* PARA PRISMAS RECTANGULARES DE GAUSS *
120 '******************************************************
122 Function CuGaLe4()
123 Dim MatrizGa(2, 4)
125 'Fila 1 = Xi(abscisa)
MARCO PRCTICO
60
126 'Fila 2 = Wi (peso)
128 MatrizGa(1, 1) = 0.861136311594053
129 MatrizGa(1, 2) = -0.861136311594053
130 MatrizGa(1, 3) = 0.33998104384856
131 MatrizGa(1, 4) = -0.33998104384856
133 MatrizGa(2, 1) = 0.347854845137454
134 MatrizGa(2, 2) = 0.347854845137454
135 MatrizGa(2, 3) = 0.652145154862546
136 MatrizGa(2, 4) = 0.652145154862546
138 CuGaLe4 = MatrizGa
139 End Function
140 Function CuGaLe3()
141 Dim MatrizGa(2, 3)
142 'Fila 1 = Xi : 'Fila 2 = Wi
144 MatrizGa(1, 1) = 0.774596669241483
145 MatrizGa(1, 2) = -0.774596669241483
146 MatrizGa(1, 3) = 0.0
149 MatrizGa(2, 1) = 0.555555555555556
150 MatrizGa(2, 2) = 0.555555555555556
151 MatrizGa(2, 3) = 0.888888888888889
153 CuGaLe3 = MatrizGa
154 End Function
155 Function CuGaLe2()
156 Dim MatrizGa(2, 2)
157 'Fila 1 = Xi : 'Fila 2 = Wi
159 MatrizGa(1, 1) = 0.577350269189626
160 MatrizGa(1, 2) = -0.577350269189626
162 MatrizGa(2, 1) = 1.0
163 MatrizGa(2, 2) = 1.0
165 CuGaLe2 = MatrizGa
166 End Function
167 Function CuGaLe1()
168 Dim MatrizGa(2, 1)
169 'Fila 1 = Xi : 'Fila 2 = Wi
170 MatrizGa(1, 1) = 0.0
171 MatrizGa(2, 1) = 2.0
172 CuGaLe1 = MatrizGa
184 Sub DMatS()
185 Dim Fact1, Fact2, Fact3 As Double
MARCO PRCTICO
61
186 Dim Young, Poiss As Double
187 ReDim DMatZ(nTens, nTens)
188
189 Poiss = vMaEl(1, 1)
190 Young = vMaEl(1, 2)
191
192 For iTens = 1 To nTens
193 For jTens = 1 To nTens
194 DMatZ(iTens, jTens) = 0
195 Next jTens
196 Next iTens
197
198 Select Case nTiPro
199 Case 1 'Tensin Plana
200 Case 2 'Deformacin Plana
201 Case 3 'Slidos de Revolucin
202 Case 4 'Slidos Tridimensionales
203 Fact1 = Young * (1 - Poiss) / ((1 + Poiss) * (1 - 2 * Poiss))
204 Fact2 = Fact1 * Poiss / (1 - Poiss)
205 Fact3 = Fact1 * (1 - 2 * Poiss) / (2 - 2 * Poiss)
207 DMatZ(1, 1) = Fact1
208 DMatZ(1, 2) = Fact2
209 DMatZ(1, 3) = Fact2
210 DMatZ(2, 1) = Fact2
211 DMatZ(2, 2) = Fact1
212 DMatZ(2, 3) = Fact2
213 DMatZ(3, 1) = Fact2
214 DMatZ(3, 2) = Fact2
215 DMatZ(3, 3) = Fact1
216 DMatZ(4, 4) = Fact3
217 DMatZ(5, 5) = Fact3
218 DMatZ(6, 6) = Fact3
219 Case 5 'Placas
220 Case 6 'Laminas de revolucin
221 End Select
222 End Sub
182 #End Region
B) Sub rutina D relacin fsica.
En el programa se utilizo la ecuacin (23) para el elemento tridimensional, sin embargo,
en el capitulo VII de anexos se presenta la demostracin de la obtencin de esta
ecuacin matricial.
MARCO PRCTICO
62
( )
( )( )
( )
( )
( )
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
1
1
1
1
1
1
1
1
]
1
xz
yz
xy
z
y
x
xz
yz
xy
z
y
x
E
1 2
2 1
0 0 0 0 0
0
1 2
2 1
0 0 0 0
0 0
1 2
2 1
0 0 0
0 0 0 1
1 1
0 0 0
1
1
1
0 0 0
1 1
1
2 1 1
1
(23)
C) Funcin de forma
Las funciones de forma estn dadas en el captulo II por las ecuaciones (5a) hasta la (8h).
224 Function FFormaF(ByVal f, ByVal n, ByVal c)
225 '************************************************************************
226 '* NOTA: ACA SE DE INGRESAR MANUALMENTE LOS TERMINOS DEL Vector [N] *
228 '* Byval (datos de entrada): f = ?~; n = ?~; c = ?~ *
229 '* *
230 '* Debido a la repeticin de las ecuaciones de cada elemento de la *
231 '* matriz, y para ahorrar en espacio de memoria solo se almacena las *
232 '* ecuaciones necesarias en una matriz de (1x32) *
234 '************************************************************************
235 Dim FN(nNodo, 1)
237 FN(1, 1) = 1 / (64) * (1 - f) * (1 - n) * (1 - c) * _
238 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
239 FN(4, 1) = 1 / (64) * (1 + f) * (1 - n) * (1 - c) * _
240 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
241 FN(9, 1) = 1 / (64) * (1 - f) * (1 + n) * (1 - c) * _
242 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
243 FN(12, 1) = 1 / (64) * (1 + f) * (1 + n) * (1 - c) * _
244 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
245 FN(21, 1) = 1 / (64) * (1 - f) * (1 - n) * (1 + c) * _
246 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
247 FN(24, 1) = 1 / (64) * (1 + f) * (1 - n) * (1 + c) * _
248 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
249 FN(29, 1) = 1 / (64) * (1 - f) * (1 + n) * (1 + c) * _
250 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
251 FN(32, 1) = 1 / (64) * (1 + f) * (1 + n) * (1 + c) * _
252 (9 * (f ^ 2 + n ^ 2 + c ^ 2) - 19)
253
254 FN(2, 1) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - n) * (1 - c)
255 FN(3, 1) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - n) * (1 - c)
MARCO PRCTICO
63
256 FN(10, 1) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + n) * (1 - c)
257 FN(11, 1) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + n) * (1 - c)
258 FN(22, 1) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - n) * (1 + c)
259 FN(23, 1) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - n) * (1 + c)
260 FN(30, 1) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + n) * (1 + c)
261 FN(31, 1) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + n) * (1 + c)
262
263 FN(5, 1) = 9 / (64) * (1 - n ^ 2) * (1 - 3 * n) * (1 - c) * (1 - f)
264 FN(6, 1) = 9 / (64) * (1 - n ^ 2) * (1 - 3 * n) * (1 - c) * (1 + f)
265 FN(7, 1) = 9 / (64) * (1 - n ^ 2) * (1 + 3 * n) * (1 - c) * (1 - f)
266 FN(8, 1) = 9 / (64) * (1 - n ^ 2) * (1 + 3 * n) * (1 - c) * (1 + f)
267 FN(25, 1) = 9 / (64) * (1 - n ^ 2) * (1 - 3 * n) * (1 + c) * (1 - f)
268 FN(26, 1) = 9 / (64) * (1 - n ^ 2) * (1 - 3 * n) * (1 + c) * (1 + f)
269 FN(27, 1) = 9 / (64) * (1 - n ^ 2) * (1 + 3 * n) * (1 + c) * (1 - f)
270 FN(28, 1) = 9 / (64) * (1 - n ^ 2) * (1 + 3 * n) * (1 + c) * (1 + f)
271
272 FN(13, 1) = 9 / (64) * (1 - c ^ 2) * (1 - 3 * c) * (1 - f) * (1 - n)
273 FN(14, 1) = 9 / (64) * (1 - c ^ 2) * (1 - 3 * c) * (1 + f) * (1 - n)
274 FN(15, 1) = 9 / (64) * (1 - c ^ 2) * (1 - 3 * c) * (1 - f) * (1 + n)
275 FN(16, 1) = 9 / (64) * (1 - c ^ 2) * (1 - 3 * c) * (1 + f) * (1 + n)
276 FN(17, 1) = 9 / (64) * (1 - c ^ 2) * (1 + 3 * c) * (1 - f) * (1 - n)
277 FN(18, 1) = 9 / (64) * (1 - c ^ 2) * (1 + 3 * c) * (1 + f) * (1 - n)
278 FN(19, 1) = 9 / (64) * (1 - c ^ 2) * (1 + 3 * c) * (1 - f) * (1 + n)
279 FN(20, 1) = 9 / (64) * (1 - c ^ 2) * (1 + 3 * c) * (1 + f) * (1 - n)
281 FFormaF = FN
283 End Function
D) Funcin derivada de funciones de forma
Las derivadas estn dadas en el captulo II por las ecuaciones (15a) hasta la (18h).
285 Function dFFormaF(ByVal f, ByVal n, ByVal c)
287 Dim B(32, 3)
288
289 B(1, 1) = 1 / (64) * (1 - n) * (1 - c) * (-9 * (n ^ 2 + c ^ 2) _
290 - 27 * f ^ 2 + 18 * f + 19)
291 B(4, 1) = 1 / (64) * (1 - n) * (1 - c) * (9 * (n ^ 2 + c ^ 2) _
292 + 27 * f ^ 2 + 18 * f - 19)
293 B(9, 1) = 1 / (64) * (1 + n) * (1 - c) * (-9 * (n ^ 2 + c ^ 2) _
294 - 27 * f ^ 2 + 18 * f + 19)
295 B(12, 1) = 1 / (64) * (1 + n) * (1 - c) * (9 * (n ^ 2 + c ^ 2) _
296 + 27 * f ^ 2 + 18 * f - 19)
297 B(21, 1) = 1 / (64) * (1 - n) * (1 + c) * (-9 * (n ^ 2 + c ^ 2) _
298 - 27 * f ^ 2 + 18 * f + 19)
MARCO PRCTICO
64
299 B(24, 1) = 1 / (64) * (1 - n) * (1 + c) * (9 * (n ^ 2 + c ^ 2) _
300 + 27 * f ^ 2 + 18 * f - 19)
301 B(29, 1) = 1 / (64) * (1 + n) * (1 + c) * (-9 * (n ^ 2 + c ^ 2) _
302 - 27 * f ^ 2 + 18 * f + 19)
303 B(32, 1) = 1 / (64) * (1 + n) * (1 + c) * (9 * (n ^ 2 + c ^ 2) _
304 + 27 * f ^ 2 + 18 * f - 19)
305
306 B(2, 1) = 9 / (64) * (1 - n) * (1 - c) * (9 * f ^ 2 - 2 * f - 3)
307 B(3, 1) = 9 / (64) * (1 - n) * (1 - c) * (-9 * f ^ 2 - 2 * f + 3)
308 B(11, 1) = 9 / (64) * (1 + n) * (1 - c) * (-9 * f ^ 2 - 2 * f + 3)
309 B(10, 1) = 9 / (64) * (1 + n) * (1 - c) * (9 * f ^ 2 - 2 * f - 3)
310 B(22, 1) = 9 / (64) * (1 - n) * (1 + c) * (9 * f ^ 2 - 2 * f - 3)
311 B(23, 1) = 9 / (64) * (1 - n) * (1 + c) * (-9 * f ^ 2 - 2 * f + 3)
312 B(30, 1) = 9 / (64) * (1 + n) * (1 + c) * (9 * f ^ 2 - 2 * f - 3)
313 B(31, 1) = 9 / (64) * (1 + n) * (1 + c) * (-9 * f ^ 2 - 2 * f + 3)
314
315 B(5, 1) = -9 / (64) * (1 - c) * (1 - n ^ 2) * (1 - 3 * n)
316 B(6, 1) = 9 / (64) * (1 - c) * (1 - n ^ 2) * (1 - 3 * n)
317 B(7, 1) = -9 / (64) * (1 - c) * (1 - n ^ 2) * (1 + 3 * n)
318 B(8, 1) = 9 / (64) * (1 - c) * (1 - n ^ 2) * (1 + 3 * n)
319 B(25, 1) = -9 / (64) * (1 + c) * (1 - n ^ 2) * (1 - 3 * n)
320 B(26, 1) = 9 / (64) * (1 + c) * (1 - n ^ 2) * (1 - 3 * n)
321 B(27, 1) = -9 / (64) * (1 + c) * (1 - n ^ 2) * (1 + 3 * n)
322 B(28, 1) = 9 / (64) * (1 + c) * (1 - n ^ 2) * (1 + 3 * n)
323
324 B(13, 1) = -9 / (64) * (1 - n) * (1 - c ^ 2) * (1 - 3 * c)
325 B(14, 1) = 9 / (64) * (1 - n) * (1 - c ^ 2) * (1 - 3 * c)
326 B(15, 1) = -9 / (64) * (1 + n) * (1 - c ^ 2) * (1 - 3 * c)
327 B(16, 1) = 9 / (64) * (1 + n) * (1 - c ^ 2) * (1 - 3 * c)
328 B(17, 1) = -9 / (64) * (1 - n) * (1 - c ^ 2) * (1 + 3 * c)
329 B(18, 1) = 9 / (64) * (1 - n) * (1 - c ^ 2) * (1 + 3 * c)
330 B(19, 1) = -9 / (64) * (1 + n) * (1 - c ^ 2) * (1 + 3 * c)
331 B(20, 1) = 9 / (64) * (1 + n) * (1 - c ^ 2) * (1 + 3 * c)
332
333
334 B(1, 2) = 1 / (64) * (1 - f) * (1 - c) * (-9 * (f ^ 2 + c ^ 2) _
335 - 27 * n ^ 2 + 18 * n + 19)
336 B(4, 2) = 1 / (64) * (1 + f) * (1 - c) * (-9 * (f ^ 2 + c ^ 2) _
337 - 27 * n ^ 2 + 18 * n + 19)
338 B(9, 2) = 1 / (64) * (1 - f) * (1 - c) * (9 * (f ^ 2 + c ^ 2) _
339 + 27 * n ^ 2 + 18 * n - 19)
340 B(12, 2) = 1 / (64) * (1 + f) * (1 - c) * (9 * (f ^ 2 + c ^ 2) _
MARCO PRCTICO
65
341 + 27 * n ^ 2 + 18 * n - 19)
342 B(21, 2) = 1 / (64) * (1 - f) * (1 + c) * (-9 * (f ^ 2 + c ^ 2) _
343 - 27 * n ^ 2 + 18 * n + 19)
344 B(24, 2) = 1 / (64) * (1 + f) * (1 + c) * (-9 * (f ^ 2 + c ^ 2) _
345 - 27 * n ^ 2 + 18 * n + 19)
346 B(29, 2) = 1 / (64) * (1 - f) * (1 + c) * (9 * (f ^ 2 + c ^ 2) _
347 + 27 * n ^ 2 + 18 * n - 19)
348 B(32, 2) = 1 / (64) * (1 + f) * (1 + c) * (9 * (f ^ 2 + c ^ 2) _
349 + 27 * n ^ 2 + 18 * n - 19)
350
351 B(2, 2) = -9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - c)
352 B(3, 2) = -9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - c)
353 B(10, 2) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - c)
354 B(11, 2) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - c)
355 B(22, 2) = -9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + c)
356 B(23, 2) = -9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + c)
357 B(30, 2) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + c)
358 B(31, 2) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + c)
359
360 B(5, 2) = 9 / (64) * (1 - f) * (1 - c) * (9 * n ^ 2 - 2 * n - 3)
361 B(6, 2) = 9 / (64) * (1 + f) * (1 - c) * (9 * n ^ 2 - 2 * n - 3)
362 B(7, 2) = 9 / (64) * (1 - f) * (1 - c) * (-9 * n ^ 2 - 2 * n + 3)
363 B(8, 2) = 9 / (64) * (1 + f) * (1 - c) * (-9 * n ^ 2 - 2 * n + 3)
364 B(25, 2) = 9 / (64) * (1 - f) * (1 + c) * (9 * n ^ 2 - 2 * n - 3)
365 B(26, 2) = 9 / (64) * (1 + f) * (1 + c) * (9 * n ^ 2 - 2 * n - 3)
366 B(27, 2) = 9 / (64) * (1 - f) * (1 + c) * (-9 * n ^ 2 - 2 * n + 3)
367 B(28, 2) = 9 / (64) * (1 + f) * (1 + c) * (-9 * n ^ 2 - 2 * n + 3)
368
369 B(13, 2) = -9 / (64) * (1 - f) * (1 - c ^ 2) * (1 - 3 * c)
370 B(14, 2) = -9 / (64) * (1 + f) * (1 - c ^ 2) * (1 - 3 * c)
371 B(15, 2) = 9 / (64) * (1 - f) * (1 - c ^ 2) * (1 - 3 * c)
372 B(16, 2) = 9 / (64) * (1 + f) * (1 - c ^ 2) * (1 - 3 * c)
373 B(17, 2) = -9 / (64) * (1 - f) * (1 - c ^ 2) * (1 + 3 * c)
374 B(18, 2) = -9 / (64) * (1 + f) * (1 - c ^ 2) * (1 + 3 * c)
375 B(19, 2) = 9 / (64) * (1 - f) * (1 - c ^ 2) * (1 + 3 * c)
376 B(20, 2) = 9 / (64) * (1 + f) * (1 - c ^ 2) * (1 + 3 * c)
377
378
379 B(1, 3) = 1 / (64) * (1 - n) * (1 - f) * (-9 * (n ^ 2 + f ^ 2) _
380 - 27 * c ^ 2 + 18 * c + 19)
381 B(4, 3) = 1 / (64) * (1 - n) * (1 + f) * (-9 * (n ^ 2 + f ^ 2) _
382 - 27 * c ^ 2 + 18 * c + 19)
MARCO PRCTICO
66
383 B(9, 3) = 1 / (64) * (1 + n) * (1 - f) * (-9 * (n ^ 2 + f ^ 2) _
384 - 27 * c ^ 2 + 18 * c + 19)
385 B(12, 3) = 1 / (64) * (1 + n) * (1 + f) * (-9 * (n ^ 2 + f ^ 2) _
386 - 27 * c ^ 2 + 18 * c + 19)
387 B(21, 3) = 1 / (64) * (1 - n) * (1 - f) * (9 * (n ^ 2 + f ^ 2) _
388 + 27 * c ^ 2 + 18 * c - 19)
389 B(24, 3) = 1 / (64) * (1 - n) * (1 + f) * (9 * (n ^ 2 + f ^ 2) _
390 + 27 * c ^ 2 + 18 * c - 19)
391 B(29, 3) = 1 / (64) * (1 + n) * (1 - f) * (9 * (n ^ 2 + f ^ 2) _
392 + 27 * c ^ 2 + 18 * c - 19)
393 B(32, 3) = 1 / (64) * (1 + n) * (1 + f) * (9 * (n ^ 2 + f ^ 2) _
394 + 27 * c ^ 2 + 18 * c - 19)
395
396 B(2, 3) = -9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - n)
397 B(3, 3) = -9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - n)
398 B(10, 3) = -9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + n)
399 B(11, 3) = -9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + n)
400 B(22, 3) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 - n)
401 B(23, 3) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 - n)
402 B(30, 3) = 9 / (64) * (1 - f ^ 2) * (1 - 3 * f) * (1 + n)
403 B(31, 3) = 9 / (64) * (1 - f ^ 2) * (1 + 3 * f) * (1 + n)
404
405 B(5, 3) = -9 / (64) * (1 - f) * (1 - n ^ 2) * (1 - 3 * n)
406 B(6, 3) = -9 / (64) * (1 + f) * (1 - n ^ 2) * (1 - 3 * n)
407 B(7, 3) = -9 / (64) * (1 - f) * (1 - n ^ 2) * (1 + 3 * n)
408 B(8, 3) = -9 / (64) * (1 + f) * (1 - n ^ 2) * (1 + 3 * n)
409 B(25, 3) = 9 / (64) * (1 - f) * (1 - n ^ 2) * (1 - 3 * n)
410 B(26, 3) = 9 / (64) * (1 + f) * (1 - n ^ 2) * (1 - 3 * n)
411 B(27, 3) = 9 / (64) * (1 - f) * (1 - n ^ 2) * (1 + 3 * n)
412 B(28, 3) = 9 / (64) * (1 + f) * (1 - n ^ 2) * (1 + 3 * n)
413
414 B(13, 3) = 9 / (64) * (1 - f) * (1 - n) * (9 * c ^ 2 - 2 * c - 3)
415 B(14, 3) = 9 / (64) * (1 + f) * (1 - n) * (9 * c ^ 2 - 2 * c - 3)
416 B(15, 3) = 9 / (64) * (1 - f) * (1 + n) * (9 * c ^ 2 - 2 * c - 3)
417 B(16, 3) = 9 / (64) * (1 + f) * (1 + n) * (9 * c ^ 2 - 2 * c - 3)
418 B(17, 3) = 9 / (64) * (1 - f) * (1 - n) * (-9 * c ^ 2 - 2 * c + 3)
419 B(18, 3) = 9 / (64) * (1 + f) * (1 - n) * (-9 * c ^ 2 - 2 * c + 3)
420 B(19, 3) = 9 / (64) * (1 - f) * (1 + n) * (-9 * c ^ 2 - 2 * c + 3)
421 B(20, 3) = 9 / (64) * (1 + f) * (1 + n) * (-9 * c ^ 2 - 2 * c + 3)
423 dFFormaF = B
424 End Function
MARCO PRCTICO
67
1
1
1
]
1
1
1
1
1
1
1
]
1
n
i
i
i
i
i i i
i i i
i i i
e
z
y
x
N N N
N N N
N N N
J
1
) (
E) Sub rutina Jacobiano J
El Jacobiano se puede determinar mediante la ecuacin (13).
(13)
426 Sub JacobS(ByVal iElemB, ByVal kpGausB, ByVal fFormaB, ByVal dFFormaB)
427 '*********************************************************
429 '* CALCULA EL JACOBIANO, SU DETERMINANTE E INVERSA *
430 '* Y LAS DERIVADAS CARTESIANAS DE LAS FUNCIONES DE FORMA *
432 '*********************************************************
434 Dim xJacI(nDime, nDime), xJacM(nDime, nDime)
435 ReDim Preserve mCorpg(nDime, nGauss ^ 3)
436 ReDim mDCart(nDime, nNodo)
437
438 'CALCULA LAS COORDENADAS DE LOS PUNTOS DE INTEGRACION
439 For iDime = 1 To nDime
440 mCorpg(iDime, kpGausB) = 0
441 For iNodo = 1 To nNodo
442 mCorpg(iDime, kpGausB) = mCorpg(iDime, kpGausB) + _
443 mCoRel(iNodo, iDime) * fFormaB(iNodo, 1)
444 Next iNodo
445 Next iDime
447 'CALCULA LA MATRIZ JACOBIANO 2D Y 3D
449 For iDime = 1 To nDime
450 For jDime = 1 To nDime
451 xJacM(iDime, jDime) = 0
452 For iNodo = 1 To nNodo
453 xJacM(iDime, jDime) = xJacM(iDime, jDime) + _
454 dFFormaB(iNodo, iDime) * mCoRel(iNodo, jDime)
455 Next iNodo
456 Next jDime
457 Next iDime
459 'CALCULA EL DETERMINANTE Y LA INVERSA DEL JACOBIANO EN 3D
460 'se debe hacer un select case par 2D
462 dJacb = xJacM(1, 1) * xJacM(2, 2) * xJacM(3, 3) _
463 + xJacM(1, 3) * xJacM(2, 1) * xJacM(3, 2) _
464 + xJacM(3, 1) * xJacM(1, 2) * xJacM(2, 3) _
465 - xJacM(3, 1) * xJacM(2, 2) * xJacM(1, 3) _
MARCO PRCTICO
68
466 - xJacM(3, 3) * xJacM(1, 2) * xJacM(2, 1) _
467 - xJacM(1, 1) * xJacM(2, 3) * xJacM(3, 2)
468
469 If dJacb = 0 Then
470 MsgBox("Error en la determinante del Jacobiano")
471 End If
473 Dim prueba = dJacb
475 xJacI(1,1) = (xJacM(2,2) * xJacM(3,3) - xJacM(3,2) * xJacM(2,3)) / dJacb
476 xJacI(1,2) = -(xJacM(1,2) * xJacM(3,3) - xJacM(1,3) * xJacM(3,2)) / dJacb
477 xJacI(1,3) = (xJacM(1,2) * xJacM(2,3) - xJacM(2,2) * xJacM(1,3)) / dJacb
478 xJacI(2,1) = -(xJacM(2,1) * xJacM(3,3) - xJacM(3,1) * xJacM(2,3)) / dJacb
479 xJacI(2,2) = (xJacM(1,1) * xJacM(3,3) - xJacM(1,3) * xJacM(3,1)) / dJacb
480 xJacI(2,3) = -(xJacM(1,1) * xJacM(2,3) - xJacM(2,1) * xJacM(1,3)) / dJacb
481 xJacI(3,1) = (xJacM(2,1) * xJacM(3,2) - xJacM(3,1) * xJacM(2,2)) / dJacb
482 xJacI(3,2) = -(xJacM(1,1) * xJacM(3,2) - xJacM(3,1) * xJacM(1,2)) / dJacb
483 xJacI(3,3) = (xJacM(1,1) * xJacM(2,2) - xJacM(1,2) * xJacM(2,1)) / dJacb
485 'CALCULA LAS DERIVADAS CARTESIANAS DE LAS FUNCIONES DE FORMA
487 For iDime = 1 To nDime
488 For iNodo = 1 To nNodo
489 mDCart(iDime, iNodo) = 0
490 For jDime = 1 To nDime
491 mDCart(iDime, iNodo) = mDCart(iDime, iNodo) _
492 + xJacI(iDime, jDime) * dFFormaB(iNodo, jDime)
493 Next jDime
494 Next iNodo
495 Next iDime
497 End Sub
F) Sub rutina B relacin geomtrica.
En el programa se utilizo la ecuacin (20) para el elemento tridimensional, sin embargo, en el
capitulo VII se presenta la demostracin de la obtencin de esta ecuacin matricial.
(20)
[ ]
[ ]
[ ]
[ ] [ ]
[ ] [ ]
[ ] [ ]
1
1
1
1
1
1
1
1
1
1
1
1
1
1
]
1
x
N N
z
N N
y
N N
z
N N
x
N N
y
N N
z
N N
y
N N
x
N N
B
32 1 32 1
32 1 32 1
32 1 32 1
32 1
32 1
32 1
......
0
......
...... ......
0
0
...... ......
......
0 0
0
......
0
0 0
......
] [
MARCO PRCTICO
69
G) Sub rutina DB multiplicacin de matrices
530 Sub DBMatS()
531 ReDim DBMatz(nTens, nNeva)
533 For iTens = 1 To nTens
534 For iEvab = 1 To nNeva
535 DBMatz(iTens, iEvab) = 0
536 For jTens = 1 To nTens
537 DBMatz(iTens, iEvab) = DBMatz(iTens, iEvab) + _
538 DMatZ(iTens, jTens) * BMatz(jTens, iEvab)
539 Next jTens
540 Next iEvab
541 Next iTens
542 End Sub
543 #End Region
545 End Module
499 Sub BMatS()
500 Dim kCount As Integer = 0
501 Dim lCount, mCount, nCount As Integer
502 ReDim BMatz(nTens, nNeva)
504 For iTens = 1 To nTens
505 For iEvab = 1 To nNeva
506 BMatz(iTens, iEvab) = 0
507 Next iEvab
508 Next iTens
510 For iNodo = 1 To nNodo
511 lCount = kCount + 1
512 mCount = lCount + 1
513 nCount = mCount + 1
515 'realizar un select case por tipo de problema
516 BMatz(1, lCount) = mDCart(1, iNodo) 'x
517 BMatz(2, mCount) = mDCart(2, iNodo) 'y
518 BMatz(3, nCount) = mDCart(3, iNodo) 'z
519 BMatz(4, lCount) = mDCart(2, iNodo) 'y
520 BMatz(4, mCount) = mDCart(1, iNodo) 'x
521 BMatz(5, lCount) = mDCart(3, iNodo) 'z
522 BMatz(5, nCount) = mDCart(1, iNodo) 'x
523 BMatz(6, mCount) = mDCart(3, iNodo) 'z
524 BMatz(6, nCount) = mDCart(2, iNodo) 'y
526 kCount = nCount
527 Next iNodo
528 End Sub
MARCO PRCTICO
70
3.6.3 Ensamble de la matriz de rigidez
El cdigo de programacin de la matriz de rigidez de un elemento se lo realiz en un modulo
moRutPrin, esto debido a que este cdigo de programacin va a ser utilizado segn el
nmero de elementos que tenga la estructura a resolver.
3.6.3.1 Listado de la sub-rutina EnsambleKS
1 Sub EnsamblaKS()
2 ReDim mKrigid(nTotv, nTotv)
3 Dim nRows, nRowe As Integer
4 Dim nCols, nCol As Integer
5 Dim nodoI, nodoJ As Integer
6 Dim mK
7
8 For iTotv = 1 To nTotv
9 For jTotv = 1 To nTotv
10 mKrigid(iTotv, jTotv) = 0
11 Next jTotv
12 Next iTotv
14 'ENSAMBLA MATRIZ DE RIGIDEZ
15 For iElem = 1 To nElem
16 mK = oKelem(iElem)
17 For iNodo = 1 To nNodo
18 nodoI = mCoxNo(iNodo, iElem)
19 For iGdln = 1 To nGdln
20 nRows = ((nodoI - 1) * nGdln) + iGdln
21 nRowe = ((iNodo - 1) * nGdln) + iGdln
22 For jNodo = 1 To nNodo
23 nodoJ = mCoxNo(jNodo, iElem)
24 For jGdln = 1 To nGdln
25 nCols = (nodoJ - 1) * nGdln + jGdln
26 nCol = (jNodo - 1) * nGdln + jGdln
27 mKrigid(nRows, nCols) = mKrigid(nRows, nCols) + _
28 mK(nRowe, nCol)
29 Next jGdln
30 Next jNodo
31 Next iGdln
32 Next iNodo
33 Next iElem
35 End Sub
MARCO PRCTICO
71
3.6.4 Calculo Del Vector De Fuerzas: Subrutina FUERZAS
Se presenta seguidamente la subrutina de clculo de fuerzas nodales equivalentes para el
elemento considerado. Se considero los siguientes tipos de fuerzas: 1) Fuerzas puntuales
nodales, 2) Peso propio y 3) Fuerzas distribuidas sobre la cara de un elemento.
3.6.4.1 Rutina principal FUERZAS
La actuacin de los distintos tipos de fuerzas se controla asignando un valor diferente de cero
a los parmetros de control cPunt, cPeso y cDist.Ver grafico No22.
Grafico No22: Diagrama de flujo de la sub rutina fuerzas para el clculo de fuerzas nodales equivalentes
Fuente: Elaboracin propia
1 Module moFuerzas
3 '***********************************************
4 '* CALCULO DE LAS FUERZAS NODALES EQUIVALENTES *
5 '***********************************************
6 Dim nCont As Integer 'Contador sobre grados de libertad
7 Dim mFpNoT 'Matriz de fuerzas puntuales nodales totales
8 Dim mFDisT 'Matriz de fuerzas Distribuidas totales
9
10 Sub FuerzaS(ByVal iEsCarB)
11 Dim lOdpt As Integer
SUB RUTINA FUERZAS
Lee parametros de control del tipo de fuerza
actuante:
cPunt, cPeso y cDist
SUB RUTINA FUERZAS PUNTUALES
NODALES
SUB RUTINA DE FUERZAS POR PESO
PROPIO
SUB RUTINA DE FUERZAS REPARIDAS
SOBRE UNA CARA
Acumula el vector de fuerzas nodales
equivalentes para cada elemento
f For m a
JacobS
f For m a
MARCO PRCTICO
72
12 Dim nPunod As Integer
13 Dim cPunt, cPeso, cDist As Integer
14 ReDim mCarga(nNeva, nElem)
16 'INICIALIZA VECTOR DE FUERZAS NODALES EQUIVALENTES
17 For iElem = 1 To nElem
18 For iNeva = 1 To nNeva
19 mCarga(iNeva, iElem) = 0
20 Next iNeva
21 Next iElem
23 'FUERZAS PUNTUALES
24 cPunt = cFpNoT(iEsCarB)
25 mFpNoT = oFpNoT(iEsCarB)
26
27 If cPunt = 1 Then
28 nPunod = UBound(mFpNoT, 1)
29 For iPunod = 1 To nPunod
30 lOdpt = mFpNoT(iPunod, 1)
31 Call FuPuNoS(lOdpt, iPunod)
32 Next iPunod
33 End If
35 'FUERZAS POR PESO PROPIO
36 cPeso = mEsCar(iEsCarB, 2)
37 If cPeso = 1 Then
38 Call FuPePrS()
39 End If
41 'FUERZAS DISTRIBUIDAS EN UNA CARA
42 cDist = cFDisT(iEsCarB)
43 mFDisT = oFudi(iEsCarB)
44
45 If cDist = 1 Then
46 Call FuDistS()
47 End If
49 End Sub
3.6.4.2 Fuerzas puntuales nodales
Para mayor sencillez se ha considerado que las fuerzas puntuales exteriores actan
directamente sobre un nodo, el vector de fuerzas nodales en este caso es simple.
fi =pi
Siendo pi el vector de fuerzas puntuales actuando sobre el nodo de numeracin global i.
MARCO PRCTICO
73
51
Sub FuPuNoS(ByVal lodptB, ByVal iPunodB)
52
'ASOCIA LAS CARGAS PUNTUALES NODALES CON UN ELEMENTO
53
Dim nLoca As Integer 'Localizador de donde se aplica la carga puntual
54
55 For iElem = 1 To nElem
56 For iNodo = 1 To nNodo
57 nLoca = mCoxNo(iNodo, iElem)
58
59 If lodptB = nLoca Then
60 For iGdln = 1 To nGdln
61 nCont = (iNodo - 1) * nGdln + iGdln
62 mCarga(nCont, iElem) = mFpNoT(iPunodB, iGdln + 1)
63 Next iGdln
64 iNodo = nNodo
65 iElem = nElem
66 End If
67
68 Next iNodo
69 Next iElem
71 End Sub
3.6.4.3 Fuerzas por peso propio
El cdigo de programacin en este punto sigue la misma lgica empleada en la determinacin
de la matriz de rigidez.
[ ]
Ve
n
p
n
q
n
r
r q p
r q p
e T
i
T
i
e
i
p q
r
W W W J b N dz dy dx b N f
1 1 1
, ,
) ( ) (
(36)
73 Sub FuPePrS()
74 Dim pEsp As Double 'Peso especifico
75 Dim KpGauss As Integer 'Es un contador
76 Dim eXisp As Double
77 Dim eNasp As Double
78 Dim eGasp As Double
79 Dim dVolu As Double
80 Dim fForma, dfForma
81 ReDim mCoRel(nNodo, nDime)
82
83 'FUERZAS DE PESO PROPIO EN ELEMENTOS DE SOLIDO 2D Y 3D
MARCO PRCTICO
74
84 For iElem = 1 To nElem
85 For i = 1 To 3
86 vMaEl(1, i) = mTMaEl(iElem, i + 2)
87 Next i
88 pEsp = vMaEl(1, 3)
89
90 If pEsp = 0 Then
91 iElem = nElem '//finaliza el proceso
92 Else
93
94 'CALCULA COORDENADAS DE LOS PUNTOS NODALES
95 For iNodo = 1 To nNodo
96 lNodo = iNodo + nNodo * (iElem - 1)
97 For iDime = 1 To nDime
98 mCoRel(iNodo, iDime) = mCoRelT(lNodo, iDime + 1)
99 Next iDime
100 Next iNodo
101
102 Select Case nTiPro
103 Case 1 'Tensin Plana
104 Case 2 'Deformacin Plana
105 Case 3 'Slidos de Revolucin
106 Case 4 'Slidos Tridimensionales
107
108 'BUCLE DE INTEGRACION NUMERICA PARA ELEMENTOS DE SOLIDO
109 KpGauss = 0
110 For iGauss = 1 To nGauss
111 For jGauss = 1 To nGauss
112 For kGauss = 1 To nGauss
113 KpGauss = KpGauss + 1
114 eXisp = CuGaLe3(1, iGauss)
115 eNasp = CuGaLe3(1, jGauss)
116 eGasp = CuGaLe3(1, kGauss)
117
118 'CALCULA LAS FUNCIONES DE FORMA EN LOS _
119 ' PUNTOS DE INTEGRACION
120 fForma = FFormaF(eXisp, eNasp, eGasp)
121 dfForma = dFFormaF(eXisp, eNasp, eGasp)
122 Call JacobS(iElem, KpGauss, fForma, dfForma)
123 dVolu=dJacb*CuGaLe3(2,iGauss)*CuGaLe3(2,jGauss)_
124 *CuGaLe3(2, kGauss)
125
MARCO PRCTICO
75
126 'CALCULA LAS FUERZAS NODALES EQUIVALENTES PARA_
127 ' CADA ELEMENTO CUADRATICO
128 For iNodo = 1 To nNodo
129 nCont = (iNodo - 1) * nGdln + 3
130 mCarga(nCont,iElem) = mCarga(nCont,iElem) _
131 - pEsp* fForma(iNodo,1) *dVolu
132 Next iNodo
133
134 Next kGauss
135 Next jGauss
136 Next iGauss
137 Case 5 ' Placas
138 Case 6 'Laminas Revolucin
139 End Select
140
141 End If
142 Next iElem
144 End Sub
3.6.4.4 Fuerzas distribuidas sobre una cara.
Las fuerzas distribuidas sobre una cara estn representadas por la ecuacin (41), la
integracin numrica y la forma de programacin se la realizo con la misma lgica con la que
se encaro el clculo de la matriz de rigidez [K].
Para ser coherente con el orden de numeracin de las conexiones los nodos de la cara
cargada deben listarse en una secuencia anti horaria, una presin positiva se considera
cuando la normal sale de la cara del elemento, estas definiciones son necesarias para evitar
confusiones cuando las fuerzas distribuidas actan sobre caras con lados comunes a dos
elementos.
[ ]
p q
n
p
n
q
q p q p n
e T
i
A
n i
e
ti
e
A
W W t J N dA n t N f R
1 1
,
) ( ) (
(41)
146
Sub FuDistS()
148 Dim dGash1(nGdln)
149 Dim dGash2(nGdln)
150 Dim cordx
151 Dim dVolu
MARCO PRCTICO
76
152 Dim pXcom, pYcom, pZcom
153 Dim nLoca
154 Dim nCont, mCont, pCont
156 Dim eXisp, eNasp As Double
157 Dim fForma, dfForma
159 Dim nCara As Integer 'Numero de cara cargada
160 Dim nEass As Integer 'Elemento cargado
161 Dim vNca(nOdge) 'vector de nodos del lado cargado
162 Dim iPress As Double
164
165 For iEdge = 1 To nEdge
167 'DETERMINA EL VECTOR DE NODOS DE LA CARA CARGADA
168 nEass = mFDisT(iEdge, 1)
169 nCara = mFDisT(iEdge, 2)
170
171 Select Case nCara
172 Case 1 '"+X"
175 vNca(1) = 4 : vNca(2) = 6
176 vNca(3) = 8 : vNca(4) = 12
177 vNca(5) = 14 : vNca(6) = 16
178 vNca(7) = 18 : vNca(8) = 20
179 vNca(9) = 24 : vNca(10) = 26
180 vNca(11) = 28 : vNca(12) = 32
182 Case -1 '"-X"
183 vNca(1) = 1 : vNca(2) = 5
184 vNca(3) = 7 : vNca(4) = 9
185 vNca(5) = 13 : vNca(6) = 15
186 vNca(7) = 17 : vNca(8) = 19
187 vNca(9) = 21 : vNca(10) = 25
188 vNca(11) = 27 : vNca(12) = 29
190 Case 2 '"+Y"
191 vNca(1) = 9 : vNca(2) = 10
192 vNca(3) = 11 : vNca(4) = 12
193 vNca(5) = 15 : vNca(6) = 16
194 vNca(7) = 19 : vNca(8) = 20
195 vNca(9) = 29 : vNca(10) = 30
196 vNca(11) = 31 : vNca(12) = 32
198 Case -2 '"-Y"
199 vNca(1) = 1 : vNca(2) = 2
200 vNca(3) = 3 : vNca(4) = 4
201 vNca(5) = 13 : vNca(6) = 14
202 vNca(7) = 17 : vNca(8) = 18
MARCO PRCTICO
77
203 vNca(9) = 21 : vNca(10) = 22
204 vNca(11) = 23 : vNca(12) = 24
206 Case 3 '"+Z"
207 vNca(1) = 21 : vNca(2) = 22
208 vNca(3) = 23 : vNca(4) = 24
209 vNca(5) = 25 : vNca(6) = 26
210 vNca(7) = 27 : vNca(8) = 28
211 vNca(9) = 29 : vNca(10) = 30
212 vNca(11) = 31 : vNca(12) = 32
214 Case -3 '"-Z"
215 vNca(1) = 1 : vNca(2) = 2
216 vNca(3) = 3 : vNca(4) = 4
217 vNca(5) = 5 : vNca(6) = 6
218 vNca(7) = 7 : vNca(8) = 8
219 vNca(9) = 9 : vNca(10) = 10
220 vNca(11) = 11 : vNca(12) = 12
221 End Select
222
223 'CALCULA LAS COORDENADAS DE LOS NODOS DEL LA CARA CARGADA
224 For iOdge = 1 To nOdge
225 lNodo = vNca(iOdge) + (nEass - 1) * nNodo
226 For iDime = 1 To nDime
227 mCoRel(iOdge, iDime) = mCoRelT(lNodo, iDime + 1)
228 Next iDime
229 Next iOdge
230
231 'BUCLE DE INTEGRACION NUMERICA
232 For iGauss = 1 To nGauss
233 For jGauss = 1 To nGauss
235 eXisp = CuGaLe3(1, iGauss)
236 eNasp = CuGaLe3(1, jGauss)
238 fForma = fForDiF(eXisp, eNasp)
239 dfForma = dForDiF(eXisp, eNasp)
240
241 'CALCULA LAS FUERZAS NODALES EQUIVALENTES _
242 'EN LOS NODOS DE LA CARA CARGADA
43 For iGdln = 1 To nGdln
244 dGash1(iGdln) = 0
245 dGash2(iGdln) = 0
246 cordx = 0
247 For iOdge = 1 To nOdge
248
MARCO PRCTICO
78
249 cordx = cordx + mCoRel(iOdge, 1) * fForma(iOdge, 1)
250 dGash1(iGdln) = dGash1(iGdln) + mCoRel(iOdge, iGdln) _
251 * dfForma(iOdge, 1)
252 dGash2(iGdln) = dGash2(iGdln) + mCoRel(iOdge, iGdln) _
253 * dfForma(iOdge, 2)
255 Next iOdge
256 Next iGdln
257
258 iPress = mFDisT(iEdge, 3)
259 dVolu = CuGaLe3(2, iGauss) * CuGaLe3(2, jGauss)
260 pXcom = dGash1(2) * dGash2(3) - dGash2(2) * dGash1(3)
261 pYcom = dGash2(1) * dGash1(3) - dGash1(1) * dGash2(3)
262 pZcom = dGash1(1) * dGash2(2) - dGash2(1) * dGash1(2)
264 'ASOCIA LAS FUERZAS NODALES EQUIVALENTES A UN ELEMENTO
265 For iOdge = 1 To nOdge
266
267 nLoca = vNca(iOdge)
268 nCont = (nLoca - 1) * nGdln + 1
269 mCont = (nLoca - 1) * nGdln + 2
270 pCont = (nLoca - 1) * nGdln + 3
271
272 mCarga(nCont,nEass) = mCarga(nCont,nEass) + fForma(iOdge,1) _
273 * pXcom * iPress * dVolu
274 mCarga(mCont,nEass) = mCarga(mCont,nEass) + fForma(iOdge,1) _
275 * pYcom * iPress * dVolu
276 mCarga(pCont,nEass) = mCarga(pCont,nEass) + fForma(iOdge,1) _
277 * pZcom * iPress * dVolu
278 Next iOdge
279 Next jGauss
280 Next iGauss
281 Next iEdge
282 End Sub
3.6.5 Listado de Funciones auxiliares
3.6.5.1 Funciones de forma fuerzas distribuidas
Las funciones de forma planteadas a continuacin se obtienen remplazando el valor de ? =1,
?=1, ? =1, ? = -1, ? = -1,? = -1 en las ecuaciones (5a) para cada cara respectivamente. Una vez
realizada esta operacin se puede ver claramente un patrn repetitivo de la forma de las
ecuaciones quedando doce ecuaciones generales para todas las caras del elemento.
MARCO PRCTICO
79
284
Function fForDiF(ByVal f, ByVal n)
285
Dim FN(12, 1)
286
287
FN(1, 1) = 1 / (32) * (1 - f) * (1 - n) * (9 * (f ^ 2 + n ^ 2) - 10)
288
FN(2, 1) = 9 / (32) * (1 - f ^ 2) * (1 - 3 * f) * (1 - n)
289
FN(3, 1) = 9 / (32) * (1 - f ^ 2) * (1 + 3 * f) * (1 - n)
290
FN(4, 1) = 1 / (32) * (1 + f) * (1 - n) * (9 * (f ^ 2 + n ^ 2) - 10)
291
FN(5, 1) = 9 / (32) * (1 - n ^ 2) * (1 - 3 * n) * (1 - f)
292
FN(6, 1) = 9 / (32) * (1 - n ^ 2) * (1 - 3 * n) * (1 + f)
293
FN(7, 1) = 9 / (32) * (1 - n ^ 2) * (1 + 3 * n) * (1 - f)
294
FN(8, 1) = 9 / (32) * (1 - n ^ 2) * (1 + 3 * n) * (1 + f)
295
FN(9, 1) = 1 / (32) * (1 - f) * (1 + n) * (9 * (f ^ 2 + n ^ 2) - 10)
296
FN(10, 1) = 9 / (32) * (1 - f ^ 2) * (1 - 3 * f) * (1 + n)
297
FN(11, 1) = 9 / (32) * (1 - f ^ 2) * (1 + 3 * f) * (1 + n)
298
FN(12, 1) = 1 / (32) * (1 + f) * (1 + n) * (9 * (f ^ 2 + n ^ 2) - 10)
300
fForDiF = FN
302
End Function
303
Function dForDiF(ByVal f, ByVal n)
305
Dim B(12, 2)
306
307
B(1, 1) = 1 / (32) * (1 - n) * (-9 * (n ^ 2) - 27 * f ^ 2 + 18 * f + 10)
308
B(2, 1) = 9 / (32) * (1 - n) * (9 * f ^ 2 - 2 * f - 3)
309
B(3, 1) = 9 / (32) * (1 - n) * (-9 * f ^ 2 - 2 * f + 3)
310
B(4, 1) = 1 / (32) * (1 - n) * (9 * (n ^ 2) + 27 * f ^ 2 + 18 * f - 10)
311
B(5, 1) = -9 / (32) * (1 - n ^ 2) * (1 - 3 * n)
312
B(6, 1) = 9 / (32) * (1 - n ^ 2) * (1 - 3 * n)
313
B(7, 1) = -9 / (32) * (1 - n ^ 2) * (1 + 3 * n)
314
B(8, 1) = 9 / (32) * (1 - n ^ 2) * (1 + 3 * n)
315
B(9, 1) = 1 / (32) * (1 + n) * (-9 * (n ^ 2) - 27 * f ^ 2 + 18 * f + 10)
316
B(10, 1) = 9 / (32) * (1 + n) * (9 * f ^ 2 - 2 * f - 3)
317
B(11, 1) = 9 / (32) * (1 + n) * (-9 * f ^ 2 - 2 * f + 3)
318
B(12, 1) = 1 / (32) * (1 + n) * (9 * (n ^ 2) + 27 * f ^ 2 + 18 * f - 10)
319
320
B(1, 2) = 1 / (32) * (1 - f) * (-9 * (f ^ 2) - 27 * n ^ 2 + 18 * n + 10)
321
B(2, 2) = -9 / (32) * (1 - f ^ 2) * (1 - 3 * f)
322
B(3, 2) = -9 / (32) * (1 - f ^ 2) * (1 + 3 * f)
323
B(4, 2) = 1 / (32) * (1 + f) * (-9 * (f ^ 2) - 27 * n ^ 2 + 18 * n + 10)
324
B(5, 2) = 9 / (32) * (1 - f) * (9 * n ^ 2 - 2 * n - 3)
325
B(6, 2) = 9 / (32) * (1 + f) * (9 * n ^ 2 - 2 * n - 3)
MARCO PRCTICO
80
326
B(7, 2) = 9 / (32) * (1 - f) * (-9 * n ^ 2 - 2 * n + 3)
327
B(8, 2) = 9 / (32) * (1 + f) * (-9 * n ^ 2 - 2 * n + 3)
328
B(9, 2) = 1 / (32) * (1 - f) * (9 * (f ^ 2) + 27 * n ^ 2 + 18 * n - 10)
329
B(10, 2) = 9 / (32) * (1 - f ^ 2) * (1 - 3 * f)
330
B(11, 2) = 9 / (32) * (1 - f ^ 2) * (1 + 3 * f)
331
B(12, 2) = 1 / (32) * (1 + f) * (9 * (f ^ 2) + 27 * n ^ 2 + 18 * n - 10)
332
333
dForDiF = B
335
End Function
337
End Module
3.6.5.2 Sub rutina de ensamble de fuerzas
En este punto se realiza la lectura de las cargas actuantes para cada elemento, y el cdigo de
programacin se enfoca en ordenar y ensamblar, de tal forma que facilite la operacin con las
fuerzas equivalentes totales en procesos posteriores.
39 Sub EnsamblaFS(ByVal iEsCarB)
40 Dim aSlodM(nTotv, 1) 'Vector de fuerzas nodales equivalentes
41 Dim nRows, nRowe As Integer
42 Dim nodoI As Integer
43 ReDim oFuEns(nEsCar)
44
45 For iTotv = 1 To nTotv
46 aSlodM(iTotv, 1) = 0
47 Next iTotv
49 'ENSAMBLA VECTOR DE FUERZAS ELEMENTALES
50 For iElem = 1 To nElem
51 For iNodo = 1 To nNodo
52 nodoI = mCoxNo(iNodo, iElem)
53 For iGdln = 1 To nGdln
54 nRows = ((nodoI - 1) * nGdln) + iGdln
55 nRowe = ((iNodo - 1) * nGdln) + iGdln
56 aSlodM(nRows, 1) = aSlodM(nRows, 1) + mCarga(nRowe, iElem)
57 Next iGdln
58 Next iNodo
59 Next iElem
60
61 oFuEns(iEsCarB) = aSlodM
63 End Sub
MARCO PRCTICO
81
3.6.6 Solucin del sistema de ecuaciones: subrutina RESOLVER
Para la solucin del problema se emplea las ecuaciones (45), (46) y (47).
[K] [K
x
] (45)
[u] = [K
*
]
-1
* [F] (46)
[F
x
] = [K] * [u] (47)
65 Sub ResolverS(ByVal iEsCarB)
66 Dim aSlodM = oFuEns(iEsCarB)
67
68 Mcon = CoConF()
69 MDespT = PROD(INV(Mcon), aSlodM)
70 MReacT = PROD(mKrigid, MDespT)
71
72 Call REACCIONES(MReacT, iEsCarB)
73 Call TensionS(iEsCarB)
75 End Sub
3.6.7 Calculo de reacciones. Subrutina REACCIONES
[R] = [F
x
] - [F] (48)
105 Sub REACCIONES(ByVal MReacB, ByVal iEsCarB)
106 Dim aSlodM = oFuEns(iEsCarB)
107
108 For iTotv = 1 To nTotv
109 MReacT(iTotv, 1) = MReacB(iTotv, 1) - aSlodM(iTotv, 1)
110 Next iTotv
112 End Sub
3.6.8 Calculo de las tensiones elementales. Subrutina TENSION
En esta seccin del programa se desarrollara tal como se explico en el captulo II del presente
proyecto de grado.
( )
n
i
i p i p
a DB
1
(49)
114 Sub TensionS(ByVal iEsCarB)
115 'Calula Tensiones y esfuerzos en los puntos de Gauss
MARCO PRCTICO
82
117 Dim mDesEl(nNodo, nGdln)
118 Dim Poiss, Young As Double
119 Dim nPosn As Integer
120 Dim kpGauss As Integer
121 Dim nGauss As Integer = 3
122 Dim kCont As Integer
123 Dim mTensg
124 Dim mTensg2(nTens, nGauss ^ 3)
125
126 'Seleccion del tipo de problema
127 'realizar un select case
128 'BUCLE SOBRE CADA ELEMENTO
129 For iElem = 1 To nElem
130
131 For i = 1 To 3
132 vMaEl(1, i) = mTMaEl(iElem, i + 2)
133 Next i
134
135 Poiss = vMaEl(1, 1)
136 Young = vMaEl(1, 2)
137 mTensg = oTenEl(iElem)
138
139 'IDENTIFICA LOS MOVIMIENTOS NODALES DEL ELEMENTO
140 For iNodo = 1 To nNodo
141 lNodo = mCoxNo(iNodo, iElem)
142 For iGdln = 1 To nGdln
143 nPosn = (lNodo - 1) * nGdln + iGdln
144 mDesEl(iNodo, iGdln) = MDespT(nPosn, 1)
145 Next iGdln
146 Next iNodo
147
148 'Realizar un select case
150 'BUCLE SOBRE CADA PUNTO DE INTEGRACION EN ELEMENTOS SOLIDOS 3d
151 kpGauss = 0
152 For iGaus = 1 To nGauss
153 For jGaus = 1 To nGauss
154 For kGaus = 1 To nGauss
155 kpGauss = kpGauss + 1
156
157 'CALCULO DE TENSIONES EN PUNTO DE INTEGRACION
158 For iTens = 1 To nTens
159 mTensg2(iTens, kpGauss) = 0
MARCO PRCTICO
83
160 kCont = 0
161 For iNodo = 1 To nNodo
162 For iGdln = 1 To nGdln
163 kCont = kCont + 1
164 mTensg2(iTens,kpGauss)=mTensg2(iTens,kpGauss)+_
165 mTensg(iTens,kCont,kpGauss)*mDesEl(iNodo,iGdln)
166 Next iGdln
167 Next iNodo
168 Next iTens
169
170 'ESCRIBE TENSIONES EN ELEMENTOS TRIDIMENSIONALES
171 Call OrdenTens(iEsCarB, mTensg2, iElem)
172
173 Next kGaus
174 Next jGaus
175 Next iGaus
176 Next iElem
178 End Sub
3.6.8.1 Listado de subrutinas auxiliares
[K] [K
x
] (45)
77 Function CoConF()
79 Dim iCont As Integer
80 Dim jCont As Integer
81 Dim kCont As Integer
82 Dim mContr(nTotv, nTotv)
83
84 For iTotv = 1 To nTotv
85 For jTotv = 1 To nTotv
86 mContr(iTotv, jTotv) = mKrigid(iTotv, jTotv)
87 Next jTotv
88 Next iTotv
89
90 For iRest = 1 To nRest
91 For iGdln = 1 To nGdln
92 iCont = mMoPreT(iRest, iGdln + 1)
93 kCont = mMoPreT(iRest, 1)
94
95 If iCont = 1 Then
96 jCont = (kCont - 1) * nGdln + iGdln
97 mContr(jCont, jCont) = 1000000000000000
MARCO PRCTICO
84
98 End If
99 Next iGdln
100 Next iRest
101
102 CoConF = mContr
103 End Function
180 Sub OrdenTens(ByVal iEsCarB, ByVal mTensB, ByVal iElemB)
182 Dim cTens As Integer
183 Dim mTensT(nTens * nElem, nGauss ^ 3 + 1)
184 ReDim Preserve MTensE(nEsCar)
185
186 cTens = 1
187 For iTens = 1 To nTens
188 cTens = iTens + nTens * (iElemB - 1)
189 For iGauss = 1 To nGauss ^ 3
190 mTensT(cTens, 1) = iElemB
191 mTensT(cTens, iGauss + 1) = mTensB(iTens, iGauss)
192 Next iGauss
193 Next iTens
195 MTensE(iEsCarB) = mTensT
197 End Sub
199 End Module
3.7 VER RESULTADOS
Este comando muestra una lista de los resultados de los distintos estados de carga que se desea ver o
exportar. Su cdigo de programacin est orientado a mostrar los resultados requeridos para cada estado
de carga.
CAPITULO IV:
EJEMPLOS PRACTICOS
EJEMPLOS PRACTICOS
86
CAPTULO IV
4. EJEMPLOS DE APLICACIN Y RESULTADOS
Despus de haber desarrollado la formulacin terica y la implementacin del elemento en un
programa computacional, se demuestran algunas de las aplicaciones prcticas para el mismo,
comparndolas con el software SAP 2000 y ADINA SYSTEM ademas mostrando las
diferencias. Dichas aplicaciones validan todo lo expuesto anteriormente, y darn una idea de las
posibilidades que brinda esta valiosa herramienta.
4.1 VALIDACION DE LOS RESULTADOS
Para la validacin de resultados se muestran algunos ejemplos sencillos desde el punto de vista
comparativo. Se muestra a continuacin un slido, una losa y un muro en arco, los cuales se han
comparado con softwears disponibles en el mercado, en este caso se comparo con el SAP 2000 y
con ADINA SYSTEM. Las caractersticas de estos programas y el desarrollado en el presente
proyecto de grado son las siguientes:
(*) Presenta otro elemento para realizar un anlisis con geometra curvada
(-) No se tiene informacin
Cuadro No 5a. Comparacin de caracteristicas del programa desarrolado con el SAP 2000 y con ADINA system
Fuente: Elaboracin propia
Caract erist icas
PROGRAM A
DESARROLLADO
SAP 2000 ADI NA SYSTEM
Ver si on del pr ogr am a ut i l i zado V1 v14 v8.7.3
Nm er o de nodos del el em ent o 32 8 27
Isot r opi co Isot r opi co Isot r opi co
El ast i co El ast i co El ast i co
Punt os de Int egr aci on por di r . (n) 3 - 3
Ser i ndi pi t o - Lagr angi ano
Isopar am et r i co * Isopar am et r i co Isopar am et r i co
M t odo de i nt egr aci n num er i ca Gauss - -
M t odo de i nver si n de mat r i z Gauss - -
M at er i al
Ti po de el em ent o
EJEMPLOS PRACTICOS
87
4.1.1 Solido
En este ejemplo se analiza un slido cubico.
a) Geometra:
a = 1.0 [m]; b= 1.0 [m]; h = 1.0 [m]
b) Materiales:
Grafica No 23. Solido de 1x1x1
c) Condiciones de contorno: Fuente: Elaboracin propia
* El numero 1 indica que existe restriccin en esa direccin
d) Fuerzas puntuales:
Nodo X Y Z
4 1000 0 0
12 1000 0 0
24 1000 0 0
32 1000 0 0
21
24
4
32
12
9
29
Z
Y
X
1000
1000
1000
1000
1
1
.0 1.0
1.0
Nodo X Y Z
1 1 1 1
9 1 1 1
21 1 1 1
29 1 1 1
No
Elem
Codigo
Mat.
Poisson
(v)
Young (E)
[kN/m]
Peso Esp.
[kN/m]
1 1 0.2 24855578 23.5631
EJEMPLOS PRACTICOS
88
d) Resultados: comparacin de reacciones.
Cuadro No 5. Comparacin de resultados (reacciones) del programa desarrolado con el SAP 2000 y con ADINA system
Fuente: Elaboracin propia
Programa
1X1X1 1x1x1 2x2x2 4x4x4 8x8x8 16x16x16 1x1x1 (2x2x2) 3x3x3 5x5x5 10x10x10
(1 elem) (1 elem) (8 elem) (64 elem) (512 elem) 4096 ? % (1 elem) (8elem) (27 elem) (125 elem) (1000 ele) ? %
x -994.11 -1000 -1000 -1000 -1000 -1000 5.89 0.59 -1000.00 -1000.00 -1000.00 -1000.00 -1000.00 5.9 0.59
y -367.30 -125 -343.22 -341.02 -360.23 -371.03 -7.07 -1.96 -512.90 -376.28 -377.98 -386.86 -393.72 9.0 2.39
z -364.13 -125 -343.22 -341.02 -360.23 -371.03 -3.90 -1.08 -512.90 -376.28 -377.98 -386.86 -393.72 12.2 3.23
x 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
z 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
x 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
z 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
x -994.11 -1000 -1000 -1000 -1000 -1000 5.89 0.59 -1000.00 -1000.00 -1000.00 -1000.00 -1000.00 5.9 0.59
y 367.30 125 343.22 341.02 360.23 371.03 7.07 1.96 512.90 376.28 377.98 386.86 393.72 -9.0 2.39
z -364.13 -125 -343.22 -341.02 -360.23 -371.03 -3.90 -1.08 -512.90 -376.28 -377.98 -386.86 -393.72 12.1 3.23
x -0.01 0 0 0 0 0 0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
z 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
x 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
z 0.01 0 0 0 0 0 0 0 0 0 0 0 0 0 0
x -1005.89 -1000 -1000 -1000 -1000 -1000 -5.89 -0.59 -1000.00 -1000.00 -1000.00 -1000.00 -1000.00 -5.9 0.59
y -372.74 -125 -343.22 -341.02 -360.23 -371.03 -12.51 -3.47 -512.90 -376.28 -377.98 -386.86 -393.72 3.5 0.94
z 375.91 125 343.22 341.02 360.23 371.03 15.68 4.35 512.90 376.28 377.98 386.86 393.72 -0.4 0.10
x 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
z 0.00 0 0 0 0 0 0 0 0 0 0 0 0 0 0
x 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
z 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
x -1005.89 -1000 -1000 -1000 -1000 -1000 -5.89 -0.59 -1000.00 -1000.00 -1000.00 -1000.00 -1000.00 -5.9 0.59
y 372.74 125 343.22 341.02 360.23 371.03 12.51 3.47 512.90 376.28 377.98 386.86 393.72 -3.5 0.94
z 375.91 125 343.22 341.02 360.23 371.03 15.68 4.35 512.90 376.28 377.98 386.86 393.72 -0.4 0.10
x 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
y 0.00 0 0 0 0 0
0 0 0 0 0 0 0 0 0
z -0.01 0 0 0 0 0
0 0 0 0 0 0 0 0 0
32
28
29
20
21
22
8
9
10
2
Nodos Direccin
SOLIDO SAP 2000 (Elemento de 8 Nodos)
1
Diferencias
Sap 8x8x8 vs Prog.
ADINA SYSTEM (Elemento de 27 nodos) Diferencias
Adina 2x2x2 vs Prog.
EJEMPLOS PRACTICOS
89
En el cuadro No 5 se puede apreciar claramente que las diferencias son mnimas unas con
otras respectivamente, adems los porcentajes de diferencias no exceden el 5% por tanto se
considera que no existe una gran dispersin en los resultados. Cabe hacer notar que las
diferencias son aun menores con respecto al software ADINA, adems que se requieren
muchos menos elementos para llegar a resultados aproximados que con su anlogo software
SAP 2000 e incluso con la misma cantidad de elementos se tiene buena aproximacin, como
se vera mas adelante.
En el cuadro No 6 se muestra la comparacin de los desplazamientos obtenidos por el
programa desarrollado, el SAP 2000 y el ADINA de algunos nodos para mayor simplicidad.
Cuadro No 6. Comparacin desplazamientos (U) del programa con el SAP 2000 y ADINA
Fuente: Elaboracin propia
Se puede ver claramente que las diferencias no son grandes, ya que nos encontramos en el
sistema mtrico, en caso de que se quiera ms precisin del programa, entonces se puede
utilizar un mayor nmero de elementos, esto se ver con claridad en el siguiente ejemplo.
Programa SAP 2000 ADINA
1X1X1 8x8x8 2x2x2
(1 elem) (512 elem) ?c (8 elem) ?c
x 9.2E-04 4.94E-03 -0.00402 3.01E-03 -0.00209
y 1.9E-04 7.30E-04 -0.00054 4.49E-04 -0.00026
z 1.9E-04 7.30E-04 -0.00054 4.49E-04 -0.00026
x 9.2E-04 4.94E-03 -0.00402 3.01E-03 -0.00209
y -1.9E-04 -7.30E-04 0.00054 -4.49E-04 0.00026
z 1.9E-04 7.30E-04 -0.00054 4.49E-04 -0.00026
x 9.3E-04 4.94E-03 -0.00401 3.01E-03 -0.00208
y 1.9E-04 7.30E-04 -0.00054 4.49E-04 -0.00025
z -2.0E-04 -7.30E-04 0.00053 -4.49E-04 0.00025
x 9.3E-04 4.94E-03 -0.00401 3.01E-03 -0.00208
y -1.9E-04 -7.30E-04 0.00054 -4.49E-04 0.00025
z -2.0E-04 -7.30E-04 0.00053 -4.49E-04 0.00025
Com par aci on de Despl azami ent os u
Diferencias
Nodos Direccin Nodos
2
4
6
8 32
24
12
4
27
Nodos
Diferencias
7
9
25
EJEMPLOS PRACTICOS
90
4.1.2 Losa
En este ejemplo se analiza una losa gruesa, con distintos estados de carga.
a) Geometra
a = 3.0 [m]; b= 3.0 [m]; e = 0.25 [m]
b) Materiales Gr af i ca No 24. Losa 3x3x0.25
Fuente: Elaboracin propia
d) Estados de carga
Cargas Puntuales Peso propio Cargas distribuidas
(-4000 [kN]) (-100 [kN/m])
Grafica No 25. Carga Puntual en los nodos Grafica No 26. Carga distribuida en la cara 3
Fuente: Elaboracin propia Fuente: Elaboracin propia
e) Idealizacin estructural con el programa desarrollado:
En el grafico No27 se muestra un ejemplo de idealizacin con ocho elementos, la numeracin
de los mismos est indicado por una flecha roja, adems se tiene la numeracin de los nodos.
Los dems ejemplos se realizaron de la misma forma, es decir, siguiendo el mismo orden de
numeracin.
No
Elem
Codigo
Mat.
Poisson
(v)
Young (E)
[kN/m]
Peso Esp.
[kN/m]
1 2 0.3 200000000 76.9729
3
3
0.25
100
4000
EJEMPLOS PRACTICOS
91
Grafica No 27. Losa 3x3x0.25
Fuente: Elaboracin propia
1
3
5
6
7
20
13
10
23
26
33
52
58
71
84
135
122
14
116
103
106
119
132
129
27
4
55
17
109
3
3
0.25
2
99
90
48
39
102
93
51
42
96
87
45
36
8
112
115
128
125
30
1
2
6
4
8
3
7
5
EJEMPLOS PRACTICOS
92
f) Resultados
En los siguientes cuadros se muestra la comparacin de las reacciones obtenidas por el programa desarrollado, el SAP 2000 y el
ADINA para los tres estados de carga antes mencionados.
Cuadro No7. Comparacin de resultados (reacciones) del programa con el SAP 2000 y ADINA. Cargas puntuales
Fuente: Elaboracin propia
SHELL
2X2X2 4X4X4 (9elem) 2X2X2 4X4X4 8x8x8 16x16x16 2x2x2 4x4x4 5X5X4 6x6x4 8x8x8
(8 elem) (64 elem) (9 elem) (8 elem) (64 elem) (512 elem) (4096 elem) 8 elem 64 elem 100 elem 144 elem 512 elem
X 2223.58 1505.60 0 2952.83 2241.42 1634.22 1121.42 2093.72 1623.72 1457.6 1329.26 1141.37
Y 2223.58 1505.60 0 2952.83 2241.42 1634.22 1121.42 2093.72 1623.72 1457.6 1329.26 1141.37
Z 999.97 1000.41 1000 10000 1000 1000 1000 1000 1000 1000 1000 1000
X -0.01 -0.01 0 0 0 0 0 0 0 0 0 0
Y 0.01 -0.01 0 0 0 0 0 0 0 0 0 0
Z -0.01 0.08 0 0 0 0 0 0 0 0 0 0
X 0.00 0.00 0 0 0 0 0 0 0 0 0 0
Y 0.00 0.01 0 0 0 0 0 0 0 0 0 0
Z 0.01 0.39 0 0 0 0 0 0 0 0 0 0
X -2223.55 -0.01 0 -2952.83 -2241.42 -1634.22 -1121.42 -2093.72 -1623.72 -1457.6 -1329.26 -1141.37
Y 2223.63 -0.03 0 2952.83 2241.42 1634.22 1121.42 2093.72 1623.72 1457.6 1329.26 1141.37
Z 1000.10 2.97 1000 10000 1000 1000 1000 1000 1000 1000 1000 1000
X 0.00 0.00 0 0 0 0 0 0 0 0 0 0
Y -0.01 -0.01 0 0 0 0 0 0 0 0 0 0
Z -0.13 0.19 0 0 0 0 0 0 0 0 0 0
X 0.01 -0.01 0 0 0 0 0 0 0 0 0 0
Y 0.00 0.00 0 0 0 0 0 0 0 0 0 0
ADI NA syst em (Elem ent o Solido de 27 nodos)
32 n
6
7
8
1
2
Nodos Direccin
REACCIONES
Programa
Cargas puntuales en el cenntro: (-4000)
SAP 2000 (Elemento de 8 nodos)
Solido
EJEMPLOS PRACTICOS
93
Cuadro No8. Diferencias de resultados (reacciones) entre el programa desarrolladp con el SAP 2000 y el
ADINA System. Carga puntual
Fuente: Elaboracin propia
En el cuadro No8 se ve claramente que las diferencias entre el programa desarrollado y el SAP
2000 ademas con el ADINA no son representativas, ya que la mxima dispersin no fue mayor
al 8%.
Programa SAP
2X2X2 4X4X4
(8 elem) (64 elem) ? %
x 2223.58 2241.42 -17.84 0.796
y 2223.58 2241.42 -17.84 0.796
z
999.97 1000 -0.03 0.003
Programa SAP
4X4X4 8x8x8
(64 elem) (512 elem) ? %
x 1505.60 1634.22 -128.62 7.870
y 1505.60 1634.22 -128.62 7.870
z
1000.41 1000 0.41 0.041
Programa ADINA
2X2X2 2X2X2
(8 elem) (8 elem) ? %
x 2223.58 2093.72 129.9 6.2
y 2223.58 2093.72 129.9 6.2
z
999.97 1000 0.0 0.0
Programa ADINA
4X4X4 5x5x5
(64 elem) (125 elem) ? %
x 1505.60 1457.6 48.00 3.29
y 1505.60 1457.6 48.00 3.29
z
1000.41 1000 0.41 0.04
Nodos Direccin
Diferencias
1
Nodos Direccin
Diferencias
1
1
Nodos Direccin
1
Nodos
Diferencias
Diferencias
Direccin
EJEMPLOS PRACTICOS
94
Cuadro No 9. Comparacin de resultados (reacciones) del programa con el SAP 2000 y ADINA. Cargas distribuidas
Fuente: Elaboracin propia
CARGA DI STI DUI DA EN LA CARA 3: -10 0
SHELL
1X1X1 2X2X2 3X3X3 4X4X4 (9elem) 1x1x1 9x9x3 27x27x9 2x2x2 4x4x4 5x5x5 8x8x8
(1 elem) (8 elem) (27 elem) (64 elem) (9 elem) (1 elem) (243 elem) (6561 elem) 8 64 125 512
X 470.8 382.6 329.70
290.70 0 4.02 296.19 174.61 391.93 296.90 268.29 214.97
Y 470.8 382.6 329.70 277.01 0 4.02 296.19 174.61 391.93 296.90 268.29 214.97
Z 225.0 224.9 224.80 230.73 225 225 225 225 225 225 225 225
X 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Y 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Z 0.1 0.1 -0.03 -0.01 0 0 0 0 0 0 0 0
X -470.8 0.0 0.00 0.00 0 -4.02 -296.19 -174.61 -391.93 -296.90 -268.29 -214.97
Y 470.8 0.0 -0.02 0.00 0 4.02 296.19 174.61 391.93 296.90 268.29 214.97
Z 225.0 -0.3 -0.57 -0.43 225 225 225 225 225 225 225 225
X 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Y 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Z 0.1 -0.2 -0.01 -0.01 0 0 0 0 0 0 0 0
X 0.0 0.0 0.00 -0.01 0 0 0 0 0 0 0 0
Y 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Z 0.2 0.0 -0.01 0.00 0 0 0 0 0 0 0 0
X 0.0 -382.6 0.00 0.00 0 0 0 0 0 0 0 0
Y 0.0 382.6 -0.01 0.01 0 0 0 0 0 0 0 0
Z 0.0 225.0 -0.58 -0.64 0 0 0 0 0 0 0 0
X 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Y 0.0 0.0 0.00 -0.01 0 0 0 0 0 0 0 0
Z 0.0 0.0 0.05 -0.01 0 0 0 0 0 0 0 0
X 470.8 0.0 0.00 0.00 0 4.02 296.19 174.61 391.93 296.90 268.29 214.97
Y -470.8 0.0 0.00 0.00 0 -4.02 -296.19 -174.61 -391.93 -296.90 -268.29 -214.97
Z 225.0 -0.1 0.03 -0.05 225 225 225 225 225 225 225 225
X 0.0 0.0 -329.70 -0.01 0 0 0 0 0 0 0 0
Y 0.0 0.0 329.70 0.01 0 0 0 0 0 0 0 0
Z 0.1 -0.1 224.87 -0.33 0 0 0 0 0 0 0 0
X -470.8 0.0 0.00 0.00 0 -4.02 -296.19 -174.61 -391.93 -296.90 -268.29 -214.97
Y -470.8 0.0 0.01 0.00 0 -4.02 -296.19 -174.61 -391.93 -296.90 -268.29 -214.97
Z 225.1 0.4 0.00 -0.01 225 225 225 225 225 225 225 225
X 0.0 0.0 0.00 -290.70 0 0 0 0 0 0 0 0
Y 0.0 0.0 0.00 0.00 0 0 0 0 0 0 0 0
Z 0.1 0.0 -0.08 0.01 0 0 0 0 0 0 0 0
900.24 900.30 900.19 -0.01 900.00 900.00 900.00 900.00 900.00 900.00 900.00 900.00
910.1
ADINA SYSTEM (Elemento 27 nodos)
REACCIONES
32
5
6
7
8
9
10
12
2
4
Sumatoria =
SAP 2000 (Elemento 8 nodos)
SOLIDO
Programa
1
Nodos Direccin
EJEMPLOS PRACTICOS
95
Obsrvese en el cuadro No9 la variacin de las reacciones en el eje paralelo a la direccin de la carga no presenta grandes diferencias,
sin embargo, las diferencias entre las reacciones de los dems ejes se minimizan con 64 elementos del programa y 243 del SAP2000 pare
este caso en particular, y en el caso de ADINA se requiere la misma cantidad de elementos para llegar a diferencias minimas.
Cuadr o No 10. Com par aci n de r esul t ados (r eacci ones) del pr ogr ama con el SAP 2000 y ADINA. Peso pr opi o
Fuente: Elaboracin propia
SHELL
1X1X1 2X2X2 3X3X3 4X4X4 (9elem) 1x1x1 9x9x3 27x27x9 2x2x2 4x4x4 8x8x8
(1 elem) (8 elem) (27 elem) (64 elem) (9 elem) (1 elem) (243 elem) (6561 elem) 8 64 512
X 90.59 73.62
63.45 55.93 0 33.6 56.99 33.6 75.42 57.13 41.37
Y 90.59 73.62 63.45 53.28 0 33.6 56.99 33.6 75.42 57.13 41.37
Z 43.31 43.26 43.27 44.39 43.3 43.3 43.3 43.3 43.30 43.30 43.30
X 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Y 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Z -0.03 0.02 0.00 0.00 0 0 0 0 0 0 0
X -90.59 0.00 0.00 0.00 0 -33.6 -56.99 -33.6 -75.42 -57.13 -41.37
Y 90.59 0.00 0.00 0.00 0 33.6 56.99 33.6 75.42 57.13 41.37
Z 43.31 -0.19 -0.24 -0.03 43.3 43.3 43.3 43.3 43.3 43.3 43.3
X 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Y 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Z -0.02 0.02 0.00 -0.01 0 0 0 0 0 0 0
X 0.00 -73.62 0.00 0.00 0 0 0 0 0 0 0
Y 0.00 73.62 0.00 0.01 0 0 0 0 0 0 0
Z -0.02 43.26 -0.28 0.14 0 0 0 0 0 0 0
X 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Y 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Z -0.03 0.03 0.01 0.00 0 0 0 0 0 0 0
X 90.59 0.00 0.00 0.00 0 33.6 56.99 33.6 75.42 57.13 41.37
Y -90.59 0.00 0.00 0.00 0 -33.6 -56.99 -33.6 -75.42 -57.13 -41.37
Z 43.31 0.12 0.00 0.00 43.3 43.3 43.3 43.3 43.3 43.3 43.3
X 0.00 0.00 -63.45 0.00 0 0 0 0 0 0 0
Y 0.00 0.00 63.45 0.00 0 0 0 0 0 0 0
Z -0.02 0.02 43.24 0.01 0 0 0 0 0 0 0
X -90.59 0.00 0.00 0.00 0 -33.6 -56.99 -33.6 -75.42 -57.13 -41.37
Y -90.59 0.00 0.00 0.00 0 -33.6 -56.99 -33.6 -75.42 -57.13 -41.37
Z 43.30 -0.03 0.00 0.01 43.3 43.3 43.3 43.3 43.3 43.3 43.3
X 0.00 0.00 0.00 -55.93 0 0 0 0 0 0 0
Y 0.00 0.00 0.00 0.00 0 0 0 0 0 0 0
Z -0.02 0.03 0.01 -0.06 0 0 0 0 0 0 0
173.14 176.83 172.09 -0.01 173.20 173.20 173.20 173.20 173.20 173.20 173.20
171.04
Sum at oria =
SOLIDO
SAP 2000
Programa
1
Nodos Direccin
7
2
4
5
32 n
ADINA SYSTEM (Elemento 27 nodos)
REACCIONES
12
8
9
10
EJEMPLOS PRACTICOS
96
Obsrvese nuevamente que en el cuadro No10 las variaciones de las reacciones en el eje
paralelo a la direccin de la carga no son representativas, y las diferencias entre las reacciones
de los dems ejes se minimizan cuando en ambos se utilizan ms elementos (para obtener
mayor precisin). Ntese que este comportamiento se da en la mayora de los ejemplos ya
mostrados.
4.1.3 Muro arco
En este ejemplo se comparara el peso propio de un muro en forma de arco, como se muestra
en el grafico No28, adems de comparar con el SAP2000 se realizara la comparacin con un
clculo manual.
a) Geometra
R
ext
= 20.0 [m]; G = 30 [o]
h= 0.6 [m]; e = 3.0 [m]
b) Materiales
c) Estados de carga
- Peso propio: Calculo manual.
No
Elem
Codigo
Mat.
Poisson
(v)
Young (E)
[kN/m]
Peso Esp.
[kN/m]
1 2 0.3 200000000 76.9729
Ang = 30 0.5235988
R = 20
Area ext = 104.71976 [m2]
Ang = 30 0.5235988
R = 17
Area int = 75.660023 [m2]
Aex-Aint = 29.059732
Peso = 1342.0365
Prog 1x1x1 2X2X2
Peso 1349.0 1345.64
SAP 1x1x1 10x12x6
1281.6 1341.48
Y
x
z
R
2
0
.0
3
.0
3
0
Grafica No 28. Losa 3x3x0.25
Fuente: Elaboracin propia
EJEMPLOS PRACTICOS
97
Cuadro No11. Comparacin de resultados (reacciones) del programa con el SAP 2000 y ADINA. Peso propio
Fuente: Elaboracin propia
1x1x1 2X2X2 1x1x1 20x24x12 1x1x1
Nodo direc (1 elem) (8 elem) (1 elem) (5760 elem) (1 elem)
x -540.07 -712.59 7.49 -364.78 -525.26
y 1453.69 845.50 0.51 502.19 1433.89
z 441.93 367.25 329.06 440.84 440.84
x -0.03 -0.02 0 0 0
y 0.00 0.00 0 0 0
z -0.21 0.08 0 0 0
x 0.02 -0.01 0 0 0
y 0.00 -0.02 0 0 0
z -0.22 0.07 0 0 0
x 259.05 0.08 6.24 -64.81 264.2
y -1529.99 0.01 4.19 -617.3 -1509.2
z 442.34 -0.26 329.06 440.84 440.84
x -0.02 0.00 0 0 0
y 0.00 0.01 0 0 0
z 0.15 -0.07 0 0 0
x 0.02 -0.01 0 0 0
y 0.00 -0.03 0 0 0
z 0.18 0.32 0 0 0
x 0.01 93.54 0 0 0
y 0.00 -1101.86 0 0 0
z 0.15 367.70 0 0 0
x 0.00 -0.01 0 0 0
y -0.01 0.00 0 0 0
z -0.08 0.17 0 0 0
x -104.64 -0.02 6.73 132.16 -94.24
y 953.75 0.00 3.76 365.94 921.23
z 229.15 -0.13 311.74 229.9 229.9
x 0.00 -0.02 0 0 0
y 0.01 -0.01 0 0 0
z 0.04 0.10 0 0 0
x 0.00 -0.01 0 0 0
y 0.01 0.01 0 0 0
z -0.01 0.12 0 0 0
x 385.71 0.02 0.008 297.43 377.79
y -877.47 0.02 7.38 -250.84 -866.4
z 235.54 0.29 311.74 229.9 229.9
x 0.02 0.01 0 0 0
y -0.01 0.02 0 0 0
z 0.10 0.10 0 0 0
1349.65 1351.70
1317.91 1341.47 1343.49
ADINA
Solido 27 nodos
2
3
4
5
6
Sap 2000
Solido 8 Nodos
Sumatoria =
32 n
Programa
Reacciones
7
8
9
10
11
12
1
EJEMPLOS PRACTICOS
98
Comparando los valores del cuadro No11 y los clculos manuales, se puede ver que las
variaciones son mnimas. Las conclusiones de todos los resultados obtenidos se los detalla en
el capitulo V del presente trabajo de proyecto de grado.
4.2 OTRAS APLICACIONES
Se presenta a continuacin diversos ejemplos de aplicacin prctica de los elementos
tridimensionales. Ver Imagen N
o
15
Imagen N
o
15. a) Una vasija nuclear de presin analizada usando elementos tridimensionales b) muros de
contencin con curvatura y variantes en su longitud.
Fuente: Texto de Zienkiewic, V1
Adicionalmente se puede aplicar analizando una presa de gravedad o presa bveda, analizando
y discretizando la zona del terreno circundante a la presa. Otra aplicacin puede ser el analizar
unas piezas tpicas de ingeniera mecnica. Otras aplicaciones interesantes pueden encontrarse
en la literatura listada en el captulo VI del presente trabajo de proyecto de grado.
CAPITULO V:
CONCLUSIONES Y RECOMENDACIONES
CONCLUSIONES
100
CAPTULO V
5. CONCLUSIONES Y RECOMENDACIONES
5.1 CONCLUSIONES GENERALES
Uno de los beneficios directos de la implementacin del mtodo de los elementos finitos es la
gran reduccin de tiempo de resolucin de un problema. Cabe recordar que los ingenieros
siempre han tratado de reducir el tiempo de clculo de un problema, es por ello que han
desarrollado diferentes mtodos e hiptesis de simplificacin para reducir este tiempo y adems
llegar a una precisin deseada.
La precisin alcanzada, o la diferencia de resultados frente al software ADINA y SAP 2000,
fueron poco representativas, por lo tanto, el programa desarrollado en el presente trabajo de
proyecto de grado da resultados aceptables y dentro del margen usual de dispersin.
Como se ha podido ver en el captulo IV, el programa ha sido utilizado y puede ser utilizado para
resolver diferente tipo de problemas como ser: Vigas gruesas rectas, vigas gruesas curvas, vigas
pared, losas gruesas, losas con curvatura, losas con huecos, muros rectos, muros con curvatura,
y la combinacin de los mismos, adems tambin se puede analizar presas de gravedad, presas
bveda, piezas de ingeniera mecnica, fundaciones de lados rectos y curvos (estos ltimos se
pueden resolver si se adiciona al programa apoyos elsticos).
Para obtener una buena aproximacin en ciertos casos ser necesario utilizar un mayor nmero
de elementos que si se emplearan directamente elementos de rdenes superiores es decir en la
prctica es preferible obtener la precisin deseada utilizando mallas mas tupidas de elementos
sencillos que mallas groseras de elementos ms complejos, sin embargo existen muchas
estructuras cuyas caractersticas geomtricas, mecnicas o de cargas no permiten la utilizacin
de modelos de clculo simplificados.
En general el elemento ptimo debe determinarse para cada caso en particular, es decir parece
obvio que dichos elementos complejos podran utilizarse directamente para el anlisis de
laminas curvas, sin embargo la utilizacin sin modificaciones de este tipo de elementos da lugar
CONCLUSIONES
101
a ciertas dificultades, entonces como caso especial para las laminas de anlisis tridimensional o
hiptesis de Reissner Mindlin se deben realizar todas las correcciones necesarias.
5.2 CONCLUSIONES ESPECFICAS.
Las diferencias que existen entre el programa desarrollado, ADINA y el SAP 2000 se deben a
varios factores que se citan a continuacin:
- La precisin de almacenamiento de variables:
La precisin de estas variables se refiere al nmero de decimales que puede contener,
esta puede ser una fuente de dispersin y perdida de precisin ya que cuando se
invierten valores muy grandes, el resultado son valores muy pequeos.
- Mtodo de inversin de la matriz.
Para la inversin de las matrices se utilizo el mtodo de Gauss, sin embargo, el SAP
2000 el ADINA probablemente utiliza un algoritmo bastante complejo y moderno el cual
le permite reducir los posibles errores al mnimo.
- Capacidad del ordenador.
La capacidad y la velocidad del ordenador es importante a la hora de desarrollar un
programa, desde luego que un ordenador con gran capacidad y velocidad puede resolver
problemas de mayor envergadura.
- Integracin Numrica.
El mtodo de integracin numrica utilizado en el presente trabajo es el de Gauss lo cual
da una gran aproximacin, sin embargo, el SAP probablemente utiliza un mtodo ms
sofisticado.
Comparando los resultados del programa desarrollado frente al ADINA se llegan a diferencias
menores que con respecto al SAP 2000, e incluso en algunos casos utilizando el mismo nmero
de elementos.
Estas diferencias pueden ser minimizadas utilizando un mayor nmero de elementos para
resolver el problema, sin embargo, se debe tener cuidado, por que la utilizacin de un exagerado
nmero de elementos puede producir un efecto inverso, es decir, envs de acercarnos ms a la
solucin exacta nos alejamos, por que la matrix de rigidez se ve afectada (ver ejemplos del
captulo IV). Este efecto se debe a que en el proceso de resolucin del sistema de ecuaciones
se generan problemas, estos problemas dependen principalmente de la capacidad y velocidad
CONCLUSIONES
102
del ordenador (la verificacin de este fenmeno se la puede realizar con una calculadora de
bolsillo, si en esta se trata de invertir una matriz con trminos muy grandes y otros relativamente
pequeos, los resultados no sern los esperados).
En los ejemplos mostrados en el captulo IV se puede apreciar claramente que las diferencias
son mnimas unas con otras respectivamente, por tano se considera que no existe una gran
dispersin en los resultados. Adicionalmente las variaciones de lo resultados de estos ejemplos
en el eje paralelo a la direccin de la carga no son representativas, y las diferencias entre las
reacciones de los dems ejes se minimizan cuando en ambos se utilizan ms elementos.
5.3 RECOMENDACIONES
Como se menciono en el captulo III del presente trabajo, en el mercado existe una gran
variedad de programas para resolver estructuras, sin embargo, pese a la existencia de dichos
programas, un buen conocimiento de la programacin del mtodo de los elementos finitos puede
ser de gran inters para el tcnico lector, tanto o ms, en algunos casos, que la propia teora
en que se basan los clculos. Un importante coste puede reducirse si el tcnico lector es capaz
de desarrollar su propio programa de acuerdo con sus necesidades especificas.
El software obtenido por la aplicacin del mtodo de los elementos finitos genera soluciones
aproximadas basadas en una serie de simplificaciones e hiptesis, por lo que para un uso
adecuado se recomienda conocer los fundamentos tericos y las consideraciones prcticas que
lo llevaron a su creacin.
CAPITULO VI:
BIBLIOGRAFIA
BIBLIOGRAFA
104
CAPTULO VI
6.1 BIBLIOGRAFIA
6.1.1 Mtodo De Los Elementos Finitos
- Yecid Aliaga, Texto gua del mtodo de elementos finitos, Segunda edicin, UMSA, La
Paz Bolivia, 2010
- Eugenio Oate, Calculo de estructuras por el mtodo de elementos finitos, Segunda
edicin, Barcelona Espaa,1995
- Zienkiewic Taylor, El mtodo de elementos finitos V1, Cuarta edicin, Barcelona
Espaa,1994
- Zienkiewic Taylor, El mtodo de elementos finitos V2, Cuarta edicin, Barcelona
Espaa,1995
- Zienkiewic Taylor, The finite element method V1 the basis, Fifth edition, Barcelona
Spain,2000
- Zienkiewic Taylor, El mtodo de elementos finitos V2 Solid mechanics, Fifth edition,
Barcelona Spain,2000
- Zienkiewic Taylor, El mtodo de elementos finitos V3 fluid dynamics, Fifth edition,
Barcelona Spain,2000
- Pastor Barron, Seminario, Introduccin al mtodo de los elementos finitos, UMSA, La Paz
Bolivia, 1991
- Pastor Barron, Seminario, Elementos finitos Segunda parte, UMSA, La Paz Bolivia,
1991
- Klaus-Jurgen Bathe, Finite element procedures, New Jersey United States of
America,1996
- Jorge Eduardo Hurtado, Introduccin al anlisis estructural por elementos finitos,
Manizales Colombia
- J. N. Reddy, Solutions Manual for an introduction to the finite element method, McGraw-
Hill, New York,2005
BIBLIOGRAFA
105
6.1.2 Tesis de la U.M.S.A.
- Teddy Cuellar Muller, Calculo de placas por el mtodo de elementos finitos utilizando el
elemento rectangular, UMSA, La Paz Bolivia
- Flores Chavez Mario, Anlisis dinmico de estructuras mediante el mtodo de elementos
finitos, UMSA, La Paz Bolivia, 1993
- Ibaez Nacif Carlos Antonio, Calculo de cascaras por el mtodo de elementos finitos,
UMSA, La Paz Bolivia, 1985
- Haenke Villegas Edwin, Elementos finitos para la solucin de placas delgadas, UMSA, La
Paz Bolivia, 1996
- Seborga Pozo Julio Roberto, Estudio y comparacin de elementos finitos con funciones
de interpolacin lineal y cuadrticas, UMSA, La Paz Bolivia, 2009
- Quino Chuquimia Milton, Calculo de cascaras por el mtodo de elementos finitos
utilizando elementos isoparamtricos triangulares, UMSA, La Paz Bolivia, 2005
- Marco Antonio Alaya Arnez, Anlisis de elementos tridimensionales curvos de vigas por el
mtodo de elementos finitos, EMI, La Paz Bolivia, 1997
- Arturo Martin Deheza Rossel, Anlisis lineal de slidos por el mtodo de elementos finitos,
EMI, La Paz Bolivia, 1999
6.1.3 Anlisis Estructural
- Juan Tomas, Anlisis Estructural , EUNSA, San Sebastin, 1998
- Roberto Falconi , Anlisis Matricial de Estructuras, Escuela Politcnica del Ejrcito, 2004
- Juan Miquel Canet, Calculo de estructuras libro 1 fundamentos y estudio de secciones,
Universitat Politcnica de Catalunya, 2000
CAPITULO VII:
ANEXOS
ANEXOS
107
CAPTULO VII
7.1 ANEXO 1: DEMOSTRACIONES
7.1.1 Demostracin de la obtencin de las funciones de forma
Como se recordara las funciones de forma para los nodos de arista vendrn dadas
directamente por el producto de polinomios de Lagrange, para las tres dimensiones.
l
K
m
J
n
I I JK i
l l l N N ) ( ) (
(50)
Donde:
N
i
= Funcion de forma en el nodo i
n, m, l = Grado de la funcin de forma
I, J, K = numero de nodo de anlisis (coordenadas)
) ( ) ( ) ( ) ( ) (
) ( ) ( ) ( ) ( ) (
) (
1 1 1
1 1 1
n I I I I I I O I
n I I O n
I
l
+
+
(51)
Mientras que para los nodos de vrtice ser necesario realizar una combinacin lineal entre el
polinomio de lagrange que solo considera los ocho nodos del vrtice y fracciones de las
funciones de forma de los nodos situados en las aristas que convergen en el vrtice
considerado. Para establecer lo dicho, se calculara la funcin de forma del nodo 21 y las
funciones de forma de los nodos de aristas que estn implicados.
Grafica No 29. Funcion de forma nodo 21
Fuente: Elaboracin propia
ANEXOS
108
Para obtener esta funcin de forma, como ya se menciono se empleara la siguiente ecuacin:
( ) ( )
27 23 13 25 22 17 21 21
3
1
3
2
N N N N N N N N + + + +
(52)
Donde:
es la funcin de forma dada por la grafica No30
N
17
, N
22
, N
25
= estn dadas por las graficas No 35, 31,33
N
13
, N
23
, N
27
= estn dadas por las graficas No 32, 34,36
Se puede notar que se resta a la funcin de forma con el fin de forzar el valor cero en los
nodos afectados.
Grafica No30. Funcion de forma nodo 21 Ficticio
Fuente: Elaboracin propia
Del grafico No30 obtenemos los siguientes datos:
- n = 1; m = 1; l = 1 (lineal)
- I = 0; J =0; K = 1
- ?
0
= -1; ?
1
= 1
De la ecuacin (51):
) (
) (
) ( ) (
) ( ) (
) (
1 0
1
1 0 0
1
O
O n
I
l
Notese que el coeficientes (?}
0
- ?}
0
)= 0 por tanto resultara en un valor infinito, es por esto que
los coeficientes (?.
0
- ?.
0
) y (?.- ?.
0
) no son considerados en el anlisis.
21
N
ANEXOS
109
Operando la ecuacin anterior:
) 1 1 (
) 1 (
) (
n
I
l
(a)
Anlogamente para las dems direcciones se obtiene:
) 1 1 (
) 1 (
) (
m
J
l
(b)
) 1 1 (
) 1 (
) (
+
+
l
K
l
(c)
Sustituimos (a), (b), y (c) en la ecuacin (50):
) 1 )( 1 )( 1 (
8
1
) 1 1 (
) 1 (
) 1 1 (
) 1 (
) 1 1 (
) 1 (
21 21
+
+
+
N N
(d)
Ahora los nodos implicados:
Del grafico 23 obtenemos los siguientes datos:
- n = 1; m = 3; l = 1
- I = 0; J =1; K = 1
- ?
0
= -1; ?
1
= -1/3; ?
2
= 1/3; ?
3
= 1;
De la ecuacin (51):
) 1 3 / 1 ( ) 3 / 1 3 / 1 ( ) 1 3 / 1 (
) 1 ( ) 3 / 1 ( ) 1 (
) ( ) ( ) ( ) (
) ( ) ( ) ( ) (
) (
3 1 2 1 1 1 1
3 2 1
+
+
O
O m
J
l
Por tanto:
) 1 3 ( ) 1 (
16
9
) (
2
m
J
l
) 1 1 (
) 1 (
) (
n
I
l
) 1 1 (
) 1 (
) (
+
+
l
K
l
ANEXOS
110
21
1
13
17
24
4
18
14
32
12
20
16
9
15
19
29
6
8
10
28
25
27
2
3
26
11
30
31
22
23
5
7
?
?
?
(0,0,0)
(0,0,l)
(n,0,0)
(n,m,0)
(n,m,l)
(0,m,l)
(I ,J,K )
1
1
Sustituimos en la ecuacin (50):
) 1 1 (
) 1 (
) 1 3 ( ) 1 (
16
9
) 1 1 (
) 1 (
2
25
+
+
N
Operando:
) 1 )( 1 3 ( ) 1 )( 1 (
64
9
2
25
+ N Gr af i ca No31. Funci on de f or ma nodo 25
Fuente: Elaboracin propia
Analogamente para los siguientes nodos:
) 1 1 (
) 1 (
) 1 3 ( ) 1 (
16
9
) 1 1 (
) 1 (
2
27
+
+
+
N
Operando:
) 1 )( 1 3 ( ) 1 )( 1 (
64
9
2
27
+ + N
Grafica No 32. Funcion de forma nodo 27
Fuente: Elaboracin propia
) 1 1 (
) 1 (
) 1 1 (
) 1 (
) 1 3 ( ) 1 (
16
9
2
22
+
+
N
Operando:
) 1 )( 1 )( 1 3 )( 1 (
64
9
2
22
+ N
Grafica No 33. Funcion de forma nodo 22
Fuente: Elaboracin propia
) 1 1 (
) 1 (
) 1 1 (
) 1 (
) 1 3 ( ) 1 (
16
9
2
23
+
+
+
N
Operando:
) 1 )( 1 )( 1 3 ( ) 1 (
64
9
2
23
+ + N
Grafica No 34. Funcion de forma nodo 23
Fuente: Elaboracin propia
21
1
13
17
24
4
18
14
32
12
20
16
9
15
19
29
6
8
10
28
25
27
2
3
26
11
30
31
22
23
5
7
?
?
?
1
1
(0,0,0)
(0,0,l)
(n,0,0)
(n,m,0)
(n,m,l)
(0,m,l)
(I ,J,K )
21
1
13
17
24
4
18
14
32
12
20
16
9
15
19
29
6
8
10
28
25
27
2
3
26
11
30
31
22
23
5
7
?
?
?
(0,0,0)
(0,0,l)
(n,0,0)
(n,m,0)
(n,m,l)
(0,m,l)
(I ,J,K)
1
1
ANEXOS
111
) 1 3 ( ) 1 (
16
9
) 1 1 (
) 1 (
) 1 1 (
) 1 (
2
13
N
Operando:
) 1 3 ( ) 1 )( 1 )( 1 (
64
9
2
13
N
Grafica No 35. Funcion de forma nodo 17
Fuente: Elaboracin propia
) 1 3 ( ) 1 (
16
9
) 1 1 (
) 1 (
) 1 1 (
) 1 (
2
17
N
Operando:
) 1 3 ( ) 1 )( 1 )( 1 (
64
9
2
17
+ N
Grafica No 36. Funcion de forma nodo 13
Fuente: Elaboracin propia
Remplazamos estas funciones de forma en la ecuacin (52), y factorizando:
'
+ + * ) 1 )( 1 )( 1 (
64
9
3
1
) 1 )( 1 )( 1 (
8
1
21
N
[ ] ) 1 3 )( 1 ( 2 ) 1 3 )( 1 ( 2 ) 1 3 )( 1 ( 2 + + + + +
[ ]
'
+ + + + ) 1 3 )( 1 ( ) 1 3 )( 1 ( ) 1 3 )( 1 (
Operando:
( )( )( ) ( ) [ ] 19 9 1 1 1
64
1
2 2 2
21
+ + + N
(5e)
21
1
13
17
24
4
18
14
32
12
20
16
9
15
19
29
6
8
10
28
25
27
2
3
26
11
30
31
22
23
5
7
?
?
?
(0,0,0)
(0,0,l)
(n,0,0)
(n,m,0)
(n,m,l)
(0,m,l)
(I ,J,K )
1
1
21
1
13
17
24
4
18
14
32
12
20
16
9
15
19
29
6
8
10
28
25
27
2
3
26
11
30
31
22
23
5
7
?
?
?
(0,0,0)
(0,0,l)
(n,0,0)
(n,m,0)
(n,m,l)
(0,m,l)
(I ,J,K )
1
1
ANEXOS
112
7.1.2 Demostracin de las ecuaciones de equilibrio
Imagen No 16. Equi l i br i o est at i co
Fuente: Introduccion al anlisis estructural M.E.F., Jorge Hurtado
Las tensiones introducidas en la seccin anterior guardan entre si relaciones de equilibrio que
es necesario formular explcitamente, ya que son tiles para varias deducciones posteriores.
Consideremos el cuerpo infinitesimal mostrado en la imagen No16. Al aplicar las leyes de
equilibrio en el sentido x se obtiene:
dxdy dz
z
dxdz dxdz dy
y
dydz dydz dx
x
ZX
ZX YX
YX
YX X
X
X
,
_
+ +
,
_
+ +
,
_
0 + fx dxdy
ZX
(53)
Donde fx es la componente en el sentido x de la resultante de las fuerzas externas y msicas.
Al cancelar algunos trminos y hacer un desarrollo similar para los ejes restantes, se llega a
las siguientes expresiones
0 +
fx
z y x
ZX YX X
(54a)
0 +
fx
z y x
ZY Y YX
(54b)
0 +
fx
z y x
Z YZ XZ
(54c)
ANEXOS
113
7.1.3 Demostracin de la relacin Fsica
La ley de Hooke junto con la relacin de Poisson provee una manera simple de relacionar las
tensiones y las deformaciones, en efecto bajo la accin nica de la tensin s"
X
, la deformacin
unitaria en la direccin X es:
E
X
X
(55)
Mientras que las deformaciones causadas en las direcciones Y y Z son:
E
v
E
v
X
Z
X
y
;
(56)
Donde E y v son los coeficientes de elasticidad ( de Young) y de Poisson, respectivamente.
En vista de que la ley de Hooke establece una proporcionalidad entre esfuerzos y
deformaciones (tal como la existente en las ecuaciones anteriores), resulta posible aplicar el
principio de superposicin para obtener el efecto conjunto de las tensiones s
X,
s
y,
s
z
. En
consecuencia, se tiene:
[ ] ) (
1
Z Y X X
v
E
+
(57a)
[ ] ) (
1
Z X Y Y
v
E
+
(57b)
[ ] ) (
1
X Y Z Z
v
E
+
(57c)
Im agen No 16. Def or maci ones t angenci al es
Fuente: Introduccion al anlisis estructural M.E.F., Jorge Hurtado
La deduccin del valor de las deformaciones tangenciales como funcin de las tensiones
puede realizarse a partir de un est de tensin tangencial pura, como el que muestra la
imagen No16. En efecto, si [s
z
] = [s
y
] y s
X,
= 0, en las caras del elemento abcd, inclinado p/4
radianes con respecto a la horizontal, solo se presentan esfuerzos cortantes t}, cuyo valor se
puede obtener planteando el equilibrio de fuerzas en el elemente abc.
0
4
sin
4
cos
A A
Y Z
(58)
ANEXOS
114
0
4
cos
4
cos
4
cos +
A
A A
Y Z
(59)
Donde A es el rea de las caras verticales. De aqu se obtiene que:
( )
Y Y Z
+
2
1
(60)
Por causa de estos esfuerzos tangenciales, el elemento abc sufre una distorsin angular igual
a ? /2, ya que ?corresponde al elemento completo. En consecuencia se tiene que:
Z
Y
ob
oc
+
+
,
_
1
1
2 4
tan (61)
Para valores pequeos de ?|resulta la siguiente aproximacin:
2
2
2 4
2 4
1
1
tan tan 1
tan tan
2 4
tan
,
_
(62)
Como s
z
=0 y sn
Y
= sn
z
, tenemos que:
( )
E
v
v
E
Z
Y Z Z
* ) 1 ( 1 +
(63)
Anlogamente:
E
v
Y
Y
* ) 1 ( +
(64)
De esta manera se llega a qu:
G
E
v
+
* ) 1 ( 2
(65)
Donde G es llamado modulo de rigidez. En el caso general en tres dimensiones se tiene:
G G G
ZY
ZY
XZ
XZ
XY
XY
; ; (66)
Estas ecuaciones pueden presentarse de manera matricial, como se muestra en las
ecuaciones (23) y (24) del captulo II del presente trabajo de tesis de grado.
ANEXOS
115
7.1.4 Demostracin de la relacin Geomtrica
Consideremos un cuerpo con vnculos y apoyos suficientes que eviten su desplazamiento
como cuerpo rgido, Esta condicin, que como es obvio, debe ser satisfecha por las
estructuras civiles, obliga a que solo sea posible un desplazamiento de un punto cualquiera
del cuerpo si el mismo se deforma por accin de las cargas internas y externas.
Una suposicin adicional es la de que el cuerpo solo sufre deformaciones pequeas, ya que
la suposicin de grandes deformaciones nos alejara de la hiptesis de linealidad que cobija
a los sistemas estudiados en el presente trabajo de tesis de grado. Denominados por u, v y
w a las deformaciones del cuerpo en las direcciones X, Y y Z, respectivamente. La imagen
No17 muestra la posicin deformada de las dos aristas de una de las caras del cubo
infinitesimal mostrado en la imagen No16. Es evidente que, si la longitud de la arista OA era
inicialmente dx, despus de la deformacin es igual a:
dx
x
u
u *
+
(67)
Lo que indica que la deformacin unitaria de la arista es
x
u
X
(68)
Imagen No 17. Def or m aci ones de un r ect ngul o i nf eni t esi mal
Fuente: Introduccion al anlisis estructural M.E.F., Jorge Hurtado
ANEXOS
116
De igual forma:
x
w
x
v
Z Y
;
(69)
Ahora bien tal como lo indica la imagen No17, la forma inicial del cubo tambin se altera de
manera angular. El movimiento vertical del punto A es:
dx
x
v
v *
+
(70)
Mientras que el movimiento horizontal del punto B es:
dy
x
u
u *
+
(71)
Esto indica que la deformacin angular en el plano xy es la suma de las distorsiones
angulares de las dos caras, es decir:
x
v
y
u
XY
(72)
Anlogamente:
y
w
z
v
x
w
z
u
YZ XZ
;
(73)
Para fines de clculo por el mtodo de los elementos finitos, conviene representar el conjunto
completo de las seis deformaciones, como se presento en la ecuacin (20) del captulo II del
presente trabajo de tesis de grado.
7.1.5 Demostracin del principio de los trabajos virtuales
7.1.5.1 Consideraciones energticas
En esta seccin expondremos dos principios ampliamente usados para la deduccin de
ecuaciones del mtodo de elementos finitos, los cuales hacen uso de los conceptos de
trabajo y energa. Por ello se hace necesaria una breve introduccin a estos conceptos de la
cual se deducir la expresin de los mencionados principios.
ANEXOS
117
a) Energa de deformacin
En la imagen No18(a) aparece un cubo infinitesimal sometido a la accin de una tensin
normal s
X
. La fuerza aplicada sobre la cara de rea dydz es igual a s
X
dydz y el estiramiento
total es e
x
dx. Por tanto, el trabajo realizado por esta fuerza, bajo la hiptesis de la ley de
Hooke, se expresa en la imagen No18 (b) por el rea sombreada, de valor:
dxdydz dU
X X
2
1
(74)
Si se admite que estas fuerzas no producen calor al usar la deformacin del cuerpo, este
trabajo se almacena totalmente en forma de energa potencial (tambin llamada energa de
deformacin). En general, si en el cuerpo infinitesimal hacen presencia todas las tensiones
definidas anteriormente, la energa total consistir en la suma de todas las contribuciones del
tipo expresado por la ecuacin (74), es decir,
Imagen No 18. Def or m aci ones de un r ect ngul o i nf eni t esi mal
Fuente: Introduccion al anlisis estructural M.E.F., Jorge Hurtado
( )dxdydz dxdydz u du
ZY ZY XZ XZ XY XY Z Z Y Y X X O
+ + + + +
2
1
(75)
b) Principio del trabajo virtual
Antes de concluir este captulo, es conveniente presentar la forma general que asume este
principio, que fue introducido en el captulo II. Como se recordara, el principio establece que
el trabajo realizado por las fuerzas externas a travs de un desplazamiento virtual equivale al
de las fuerzas internas a travs de las deformaciones virtuales asociadas al mismo.
Supongamos que el cuerpo de la imagen No19 se le imprime un desplazamiento virtual que
vari con las variables independientes x, y, z esto es:
ANEXOS
118
Imagen No 19. Despl azami ent os vi r t ual es.
Fuente: Introduccion al anlisis estructural M.E.F., Jorge Hurtado
( )
( )
( )
( )
,
_
z y x w
z y x v
z y x u
z y x D
, ,
, ,
, ,
, ,
(76)
Esta funcin toma valores especiales en la parte de la superficie del cuerpo que se encuentra
cargada con fuerzas distribuidas, S, denotados por ( ) z y x D , ,
:
( )
( )
( )
( )
,
_
z y x w
z y x v
z y x u
z y x D
, ,
, ,
, ,
, ,
(77)
Y valores:
( )
( )
( )
Pj
j
z y x w
z y x v
z y x u
d
,
_
, ,
, ,
, ,
(78)
En los puntos Pj de aplicacin de las fuerzas pj. Las fuerzas asociadas a los desplazamientos
( ) z y x D , , , ( ) z y x D , ,
y
j
d son, respectivamente, las fuerzas masicas
( )
( )
( )
( )
,
_
z y x b
z y x b
z y x b
z y x b
Z
Y
X
, ,
, ,
, ,
, ,
(79)
Las fuerzas repartidas sobre la superficie S:
( )
( )
( )
( )
,
_
z y x q
z y x q
z y x q
z y x q
Z
Y
X
, ,
, ,
, ,
, ,
(80)
Y las fuerzas concentradas en los diversos puntos Pj:
ANEXOS
119
( )
( )
( )
,
_
z y x p
z y x p
z y x p
p
Z j
Y j
X j
j
, , ,
, , ,
, , ,
(81)
Como el trabajo es una cantidad escalar, el trabajo de un vector de fuerzas a a travs de un
vector de desplazamientos b es igual al producto escalar de los dos vectores. Se estos son
vectores columna, como son vectores anteriores, entonces el trabajo es.
a b
a
a
a
b b b b a W
T
n
n
n
i
i i
,
_
:
) .... (
2
1
2
1
1
(82)
Esto indica que, para el cuerpo infinitesimal mostrado en la figura 3.2, el segundo de estos
trabajos virtuales es.
dV
T
(83)
Donde d ees el vector de deformaciones virtuales y sel vector de tensiones, definido en la
ecuacin (3.17). Para un cuerpo cualquiera, como el que muestra la figura 3.1, el trabajo
virtual total de las fuerzas internas se obtiene integrando sobre su volumen total V:
dV
T
V
(84)
Consideremos ahora el trabajo realizado por las fuerzas externas, que son tanto las de tipo
superficial como las msica. El trabajo de la J fuerzas concentradas es
J
j
j
T
j
p d
1
(85)
El trabajo virtual de las distribuidas es
( ) ( )dS z y x q z y x D
T
S
, , , ,
(86)
Finalmente, en lo que respecta a las fuerzas msicas, distribuidas en todo el volumen del cuerpo,
su trabajo virtual es:
( ) ( )dV z y x b z y x D
T
V
, , , ,
(87)
Por lo tanto la expresin que toma el principio de trabajo virtual es:
( ) ( ) ( ) ( )dV z y x b z y x D dS z y x q z y x D p d dV
T
V
T
S
J
j
j
T
j
T
V
, , , , , , , ,
1
+ +
(88)
ANEXOS
120
7.2 ANEXO 2: NOMBRE DE LAS VARIABLES UTILIZADAS
1 Module moDatos
3 #Region "Parmetros de Control"
4
5 'DATOS DE ENTRADA
6 '- Tipologa:
7 Public nTiPro As Integer 'Tipo de problema
8 Public nDime As Integer 'Numero de dimensiones del problema
9 Public nTens As Integer 'Numero de tensiones o esfuerzos en el anlisis
10 Public nGdln As Integer 'Numero de grados de libertad por nodo
11 Public nNodo As Integer 'Numero de nodos por elemento
12 Public nNeva As Integer 'Numero de variables por elemento
13 Public nOdge As Integer 'Numero de nodos en la cara
14
15 '- Materiales:
16 Public mTMaBd(,) 'Matriz de Tipo de Materiales de la base de datos
17 Public cCoMat 'Parmetro de control del material
18 Public mTMaEl 'Matriz tipo de material de cada elemento
19
20 '- Geometra y Conexiones nodales:
21 Public nElem As Integer 'Numero de Elementos total
22 Public nPnod As Integer 'Numero de puntos nodales (Totales)
23 Public nTotv As Integer 'Nmero total de movimientos
24
25 Public mCoxNo 'Matriz de conexiones nodales OK
26 Public mCoRelT 'Matriz de coordenadas de los nodos de todos los elementos
27
28 Public nGauss As Integer = 3 'Numero de puntos de integracin
29
30 '-Condiciones de contorno
31 Public nRest As Integer 'Numero de nodos con movimientos prescritos
32 Public mMoPreT(,) 'Matriz de movimientos prescritos totales
33
34 '-Estados de carga
35 Public nEsCar As Integer 'Numero de estados de carga
36 Public mEsCar(,) 'Matriz contenedora de estados de carga y _
37 'si se considera o no el peso propio
38
39 '-Fuerzas Puntuales
40 Public cFpNoT() 'parmetro de control de fuerzas puntuales
41 Public oFpNoT() 'Objeto que almacena datos de fuerzas puntuales
ANEXOS
121
42
43 '-Fuerzas Distribuidas
44 Public cFDisT() 'parmetro de control de fuerzas distribuidas
45 Public oFudi() 'Objeto que almacena datos fuerzas distribuidas
46 Public nEdge As Integer 'Numero de caras cargadas
47
48 'RIGIDMAT
49 ' Material
50 Public vMaEl(1, 3) 'Vector del material para un elemento
51
52 ' Geometria
53 Public lNodo As Integer 'un nodo de la lista de nodos de los elementos
54 Public mCoRel(,) 'Matriz de coordenadas de los nodos de cada elemento
55
56 ' Rigidez y Tensiones
57 Public dJacb As Double 'Determinante del Jacobiano
58 Public oKelem() 'Objeto que almacena las rigideces K de c/elemento
59 Public oTenEl() 'Objeto que almacena las tensiones en c/punto de integracin
60
61 'ENSAMBLE K
62 Public mKrigid(,) 'Matriz de rigidez final
63
64 'FUERZA
65 Public mCarga(,) 'Matriz para almacenar cargas en elementos
66 Public oFuEns() 'Objeto que almacena grupo de matrices, fuerzas ensambladas
67
68 'SOLUCION
69 Public Mcon
70 Public MTensE()
71 Public MReacT, MReacE()
72 Public MDespT, MDespE()
73
74 #End Region
You might also like
- Formulario de Inscripcion FUNDEMPRESA SRLDocument2 pagesFormulario de Inscripcion FUNDEMPRESA SRLAmanda Coffey73% (30)
- Formulario James M GereDocument6 pagesFormulario James M GereDario JavierNo ratings yet
- Manual de implementación de herramientas digitales para el desarrollo sostenibleFrom EverandManual de implementación de herramientas digitales para el desarrollo sostenibleRating: 5 out of 5 stars5/5 (1)
- Trabajo SAP2000Document50 pagesTrabajo SAP2000Wilson Miguel Solamente100% (3)
- Analisis Matricial de Estructuras Ed. 2001 - Ing. Hugo MercadoDocument47 pagesAnalisis Matricial de Estructuras Ed. 2001 - Ing. Hugo Mercadomsjl jskNo ratings yet
- Apuntes de HidraulicaDocument78 pagesApuntes de HidraulicaJuanIsraelDuranSillerico100% (1)
- ETABSDocument12 pagesETABSKevin ValdiviezoNo ratings yet
- 80 Estructuras HiperestáticasDocument2 pages80 Estructuras HiperestáticasOmarJoséPomaCubaNo ratings yet
- Metrado de Cargas Analisis EstructuralDocument40 pagesMetrado de Cargas Analisis EstructuralJose Luis Alvites AcuñaNo ratings yet
- PARCIAL 1ero - Cimentaciones y Mecanica de Suelos Aplicada - MIE-6 (5!02!2012)Document2 pagesPARCIAL 1ero - Cimentaciones y Mecanica de Suelos Aplicada - MIE-6 (5!02!2012)Raqui FerNo ratings yet
- Apnb 1225002 1 PDFDocument43 pagesApnb 1225002 1 PDFmorralla123No ratings yet
- Ejemplo Metodo de LevyDocument10 pagesEjemplo Metodo de LevyAlfredo Dorado QuispeNo ratings yet
- Universidad Autonoma Tomas Frias Facultad de Ingenieria Carrera de Ingenieria CivilDocument92 pagesUniversidad Autonoma Tomas Frias Facultad de Ingenieria Carrera de Ingenieria CivilRoxana Caba Chambi100% (1)
- Unasam Fic Practica Dirigida Ley de ArquimedesDocument4 pagesUnasam Fic Practica Dirigida Ley de Arquimedeshenry_trejoNo ratings yet
- Taller Ep Dinamica 2017 2Document35 pagesTaller Ep Dinamica 2017 2Grecia RodríguezNo ratings yet
- TAREA #5.1 Cap. 5 de PuentesDocument1 pageTAREA #5.1 Cap. 5 de PuentespruebaNo ratings yet
- Modelación de Acelerogramas SintéticosDocument20 pagesModelación de Acelerogramas SintéticosJORGE LUIS MOLLUNI BALCONANo ratings yet
- Alabeo SeccionalDocument6 pagesAlabeo Seccionalfrans abelNo ratings yet
- Dinamica USFXDocument98 pagesDinamica USFXFernando Cronembold0% (1)
- Sol Primer ParcialDocument7 pagesSol Primer ParcialJHENNY GUISELA VARGAS BRAVONo ratings yet
- El Metodo de Minimos CuadradosDocument6 pagesEl Metodo de Minimos CuadradosCristhian Ulises JulcaNo ratings yet
- Ing. Civil - Plan de Estudios 1982Document21 pagesIng. Civil - Plan de Estudios 1982Israel GustavoNo ratings yet
- Secuencia de SturmDocument25 pagesSecuencia de SturmZulma WaraNo ratings yet
- Ante Proyecto de Reglamento para La Realización de Estudios Geotécnicos en EdificacionesDocument75 pagesAnte Proyecto de Reglamento para La Realización de Estudios Geotécnicos en EdificacionesAbel Ramos100% (1)
- LISTA REQueridadDocument3 pagesLISTA REQueridadRuddy Wilmer Mamani LozaNo ratings yet
- 54 Mecanica Racional G.B.Document3 pages54 Mecanica Racional G.B.Jose OmarNo ratings yet
- 69 Resistencia de Materiales IiDocument4 pages69 Resistencia de Materiales IiJuanIsraelDuranSillericoNo ratings yet
- Teoria de Placas y LaminasDocument7 pagesTeoria de Placas y LaminasEsteban CardozoNo ratings yet
- Proyecto Cercha 3d 2-2018Document2 pagesProyecto Cercha 3d 2-2018Jose Freddy Quispe Bustinza100% (1)
- Hormigon Ing QuillaDocument4 pagesHormigon Ing QuillaJair StefanoNo ratings yet
- Ejercicio Resueltos CerchasDocument20 pagesEjercicio Resueltos CerchasOsmar Coro Herrera100% (1)
- Fundaciones para Arcillas SaturadasDocument4 pagesFundaciones para Arcillas SaturadasAlejandro Arabe PorrasNo ratings yet
- Set de Instrucciones 8088 DetalladoDocument35 pagesSet de Instrucciones 8088 DetalladoGabriel Sebastian VauccassovitchNo ratings yet
- 6240-Ii BolivarDocument1 page6240-Ii BolivarGerman Quispe50% (2)
- Solución Problemas-Sesión 5Document26 pagesSolución Problemas-Sesión 5edgar046100% (1)
- Superficies de FluenciaDocument15 pagesSuperficies de FluenciaIvan Huaman Segura100% (1)
- Examen 4to Parcial Civ 201 (01-2021)Document1 pageExamen 4to Parcial Civ 201 (01-2021)Cisneros Armata Edwin WillyNo ratings yet
- Resistencia de Materiales Ejercicio Con Carga ParabolicaDocument16 pagesResistencia de Materiales Ejercicio Con Carga ParabolicaMoisés Moiko GuillenNo ratings yet
- Metodo Area de MomentosDocument5 pagesMetodo Area de MomentosdennisIsaac2015No ratings yet
- Capitulo 6.2 Metodo de La Distribucion de Momentos o Metodos de CrossDocument17 pagesCapitulo 6.2 Metodo de La Distribucion de Momentos o Metodos de CrossFrancisco LuceroNo ratings yet
- TRABAJO 2 Metálicas 2Document26 pagesTRABAJO 2 Metálicas 2angiearevalo24No ratings yet
- Ejemplo JacobiDocument38 pagesEjemplo JacobiLilianaForyNo ratings yet
- Cap. 31 Columnas de Hormigón Armado 2015Document17 pagesCap. 31 Columnas de Hormigón Armado 2015Anonymous mnyCjzP5No ratings yet
- Esfuerzos Admisibles, PresforzadoDocument9 pagesEsfuerzos Admisibles, PresforzadoisaacNo ratings yet
- Método de Ensayo Estándar para La Determinación Del Indice de Fuerza de Carga Puntual de La RocaDocument10 pagesMétodo de Ensayo Estándar para La Determinación Del Indice de Fuerza de Carga Puntual de La RocaRichard J. Palomino TorresNo ratings yet
- Proyecto de Instalaciones de Agua Potable (Grupo N°6)Document77 pagesProyecto de Instalaciones de Agua Potable (Grupo N°6)iran choqueNo ratings yet
- Enunciados EjerciciosDocument20 pagesEnunciados EjerciciosJorge Alberto Olivari ArrascueNo ratings yet
- Variables AcotadasDocument13 pagesVariables AcotadasjulioNo ratings yet
- Hormigon ExamenDocument3 pagesHormigon Examenmarco gonzalesNo ratings yet
- Maderas MañanaDocument42 pagesMaderas MañanaJavier IbañezNo ratings yet
- Examen 3er Parcial Civ 201 (01-2021)Document1 pageExamen 3er Parcial Civ 201 (01-2021)sdergdrk se afdghdfgNo ratings yet
- MilaDocument18 pagesMilaSharol Milagros Puma FarfanNo ratings yet
- Aplicaciones de La Programación en La Ingeniería CivilDocument9 pagesAplicaciones de La Programación en La Ingeniería Civilwildor100% (1)
- Capitulo 7Document18 pagesCapitulo 7Sharon Azalde CanarioNo ratings yet
- TI Civil AnteproyectoDocument24 pagesTI Civil AnteproyectoRuben Dario Torres UrbanoNo ratings yet
- CuartillaDocument2 pagesCuartillaMaria CarielNo ratings yet
- Guia y Manual SAP2000 V14Document59 pagesGuia y Manual SAP2000 V14Eddiam MendozaNo ratings yet
- Fase 2-Modelamiento IndividualDocument9 pagesFase 2-Modelamiento IndividualJOSE RIBONNo ratings yet
- SAP2000 Es Un Sistema Integrado para Analisis y Diseño de Elementos Estructurales de Materiale AceroDocument10 pagesSAP2000 Es Un Sistema Integrado para Analisis y Diseño de Elementos Estructurales de Materiale AceroPaúl Pérez CornejoNo ratings yet
- Sap 2000Document15 pagesSap 2000heberth CondomaNo ratings yet
- Softwares CAD CAEDocument9 pagesSoftwares CAD CAEJosé AlvaradoNo ratings yet
- Tipos de Funciones PDFDocument3 pagesTipos de Funciones PDFSharito CaNo ratings yet
- Carta Bbva Prevision Afp.Document1 pageCarta Bbva Prevision Afp.Sharito CaNo ratings yet
- Productos Notables - Teoría. Definición, Casos, Fórmulas y DeducciónDocument20 pagesProductos Notables - Teoría. Definición, Casos, Fórmulas y DeducciónSharito CaNo ratings yet
- La Pesca de La TruchaDocument97 pagesLa Pesca de La TruchaSharito CaNo ratings yet
- Plan Practica 777Document7 pagesPlan Practica 777Sharito CaNo ratings yet
- Reloj DigitalDocument44 pagesReloj DigitalSharito Ca100% (4)