You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Equilibrium of Rigid BodiesDocument22 pagesEquilibrium of Rigid BodiesSpiro DourbalyNo ratings yet
- Effect of Segregation Bands On Corrosion of Steel Plate For Ship Hull PDFDocument6 pagesEffect of Segregation Bands On Corrosion of Steel Plate For Ship Hull PDFMuchamadAsyhariNo ratings yet
- Auto Reclosing in Transmission SystemsDocument14 pagesAuto Reclosing in Transmission SystemsNeelakandan MasilamaniNo ratings yet
- 06 Train Track Dynamics June 08Document21 pages06 Train Track Dynamics June 08Charles KohNo ratings yet
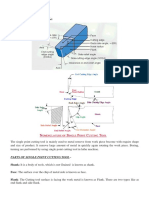
- Parts of Single Point Cutting ToolDocument8 pagesParts of Single Point Cutting ToolMukesh sutharNo ratings yet
- DPM FluentDocument182 pagesDPM Fluentபார்த்தசாரதி சுப்ரமணியன்No ratings yet
- Photonics Essentials An Introduction With Experiments 2003Document284 pagesPhotonics Essentials An Introduction With Experiments 2003Kajari Chatterjee100% (1)
- PHSC2112 PHYSICAL SCIENCE Remedial Exam WEWO!Document10 pagesPHSC2112 PHYSICAL SCIENCE Remedial Exam WEWO!Christian PaulNo ratings yet
- 11CD108 Plasticity and Metal Forming - First Series Test PART-A (9 X 2 18 Marks) Answer ALL QuestionsDocument1 page11CD108 Plasticity and Metal Forming - First Series Test PART-A (9 X 2 18 Marks) Answer ALL Questionsselva_raj215414No ratings yet
- Slides - Chapter 09Document88 pagesSlides - Chapter 09Mohammad ShawqiNo ratings yet
- Z Xiy: 1 GATE-PH 2002 Question PaperDocument8 pagesZ Xiy: 1 GATE-PH 2002 Question Paperkomal sharma100% (2)
- Higgs Lecture NotesDocument48 pagesHiggs Lecture Noteszcapg17No ratings yet
- 83 WorksheetDocument2 pages83 WorksheetRishabh DhaulakhandiNo ratings yet
- Miniature Aluminum Electrolytic Capacitors: SeriesDocument7 pagesMiniature Aluminum Electrolytic Capacitors: SeriesLaurentiu IacobNo ratings yet
- Molecular Chemical Bonding NotesDocument2 pagesMolecular Chemical Bonding NotesMeera KumarNo ratings yet
- Agritech Graduate Trainee Electrical & ElectronicsTest Past Paper 2021Document15 pagesAgritech Graduate Trainee Electrical & ElectronicsTest Past Paper 2021Ahsan RaoNo ratings yet
- PRB Chapter 3Document26 pagesPRB Chapter 3jesús Iván Santamaria najarNo ratings yet
- Physics Value Based Questions Chapter 11 Dual Nature of Radiation and Matter PDFDocument39 pagesPhysics Value Based Questions Chapter 11 Dual Nature of Radiation and Matter PDFMohammad HuzaifaNo ratings yet
- Chapter21 - Fundamental of MachiningDocument63 pagesChapter21 - Fundamental of Machining叭叭叭2No ratings yet
- Structural Mechanics of Buried PipesDocument11 pagesStructural Mechanics of Buried PipesSheikh Mizanur RahmanNo ratings yet
- Stark Effect in Rapidly Varying FieldsDocument20 pagesStark Effect in Rapidly Varying FieldsKrishna TripathiNo ratings yet
- Optical Properties of SemiconductorsDocument66 pagesOptical Properties of SemiconductorsCarolina UntilaNo ratings yet
- Superparamagnetic Materials: Seminar I - 4th Year (Old Program)Document12 pagesSuperparamagnetic Materials: Seminar I - 4th Year (Old Program)Reena SiwachNo ratings yet
- 2017 National Exam Part I PDFDocument11 pages2017 National Exam Part I PDFNguyễn Đức TrọngNo ratings yet
- Stream Flow LabDocument8 pagesStream Flow LabIrfan SyafriNo ratings yet
- TappersDocument3 pagesTappersJoao CarameloNo ratings yet
- CHEM10003 - Mock Exam 1Document17 pagesCHEM10003 - Mock Exam 1Sunny XiaNo ratings yet
- Problem Set 6 4Document4 pagesProblem Set 6 4SowmitraDasNo ratings yet
- Numc PDFDocument18 pagesNumc PDFMadhur MayankNo ratings yet
- MHDDocument57 pagesMHDAsifa AshrafNo ratings yet