You might also like
- Offshore Rig Inspection ChecklistDocument115 pagesOffshore Rig Inspection Checklisthosam ali100% (1)
- Ultrasonic Testing Report For PipingDocument54 pagesUltrasonic Testing Report For Pipingeldobie3No ratings yet
- BICON Prysmian Cable Cleats Selection ChartDocument1 pageBICON Prysmian Cable Cleats Selection ChartReuben JacobNo ratings yet
- The Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite StrainsDocument28 pagesThe Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite Strainssaded05No ratings yet
- 2015 - Otero - Oller - Martinez - Salomon Numerical Homogenization For Composite MaterialsDocument12 pages2015 - Otero - Oller - Martinez - Salomon Numerical Homogenization For Composite MaterialsDiana Wagner WinterNo ratings yet
- Practical Aspects of Finite Element SimulationDocument11 pagesPractical Aspects of Finite Element SimulationChandrashekar HiremathNo ratings yet
- ComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFDocument22 pagesComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFyagebu88No ratings yet
- Modified Newton Methods For Solving Fully Monolithic Phase-Field Quasi-Static Brittle Fracture PropagationDocument35 pagesModified Newton Methods For Solving Fully Monolithic Phase-Field Quasi-Static Brittle Fracture PropagationLaurentNo ratings yet
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocument13 pagesAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNo ratings yet
- VinayakChaturvedi 16064020 IDDDocument10 pagesVinayakChaturvedi 16064020 IDDVinayak ChaturvediNo ratings yet
- Composites: Part B: Adjovi Tchalla, Salim Belouettar, Ahmed Makradi, Hamid ZahrouniDocument11 pagesComposites: Part B: Adjovi Tchalla, Salim Belouettar, Ahmed Makradi, Hamid ZahrounialiNo ratings yet
- Comput. Methods Appl. Mech. Engrg.: F. Auricchio, L. Beirão Da Veiga, T.J.R. Hughes, A. Reali, G. SangalliDocument13 pagesComput. Methods Appl. Mech. Engrg.: F. Auricchio, L. Beirão Da Veiga, T.J.R. Hughes, A. Reali, G. SangalliJorge Luis Garcia ZuñigaNo ratings yet
- Topology Optimization of Continuum Structures Under Buckling ConstraintsDocument11 pagesTopology Optimization of Continuum Structures Under Buckling ConstraintsAnkur MehtaNo ratings yet
- On The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresDocument23 pagesOn The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresGogyNo ratings yet
- Lezgy Nazargah2015Document41 pagesLezgy Nazargah2015ficuniNo ratings yet
- On The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IDocument38 pagesOn The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IMilanNo ratings yet
- Makale 2Document10 pagesMakale 2Oscar LyonNo ratings yet
- Computers and Structures: Jaehyung Kim, Klaus-Jürgen BatheDocument15 pagesComputers and Structures: Jaehyung Kim, Klaus-Jürgen BatheMyron OikonomakisNo ratings yet
- Accepted ManuscriptDocument47 pagesAccepted ManuscriptficuniNo ratings yet
- 1 s2.0 S0965997816306809 MainDocument15 pages1 s2.0 S0965997816306809 Mainvenu mechNo ratings yet
- JURNALDocument27 pagesJURNALdhauz017No ratings yet
- Taylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationDocument13 pagesTaylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationIsabel H. CidNo ratings yet
- A Complete Implementation Methodology For Asymptotic Homogenization Using A Finite Element Commercial Software Preprocessing and PostprocessingDocument19 pagesA Complete Implementation Methodology For Asymptotic Homogenization Using A Finite Element Commercial Software Preprocessing and PostprocessingJames HoangNo ratings yet
- (248 256) V10N10CTDocument9 pages(248 256) V10N10CTFARID MIFTAHUL ANWARNo ratings yet
- Fast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsDocument11 pagesFast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsMirkoNo ratings yet
- Optimization of Laminated Composite Plates and Shells UsingDocument16 pagesOptimization of Laminated Composite Plates and Shells UsingGogyNo ratings yet
- Paper 37Document47 pagesPaper 37tavialimNo ratings yet
- Kahwash 2017Document9 pagesKahwash 2017Weight lossNo ratings yet
- J Msea 2009 03 078Document15 pagesJ Msea 2009 03 078Raheel AdeelNo ratings yet
- Plastic Metal FormingDocument47 pagesPlastic Metal Formingepsa333No ratings yet
- The Generalized Interpolation Material Point MethoDocument21 pagesThe Generalized Interpolation Material Point MethoJeyson MolinaNo ratings yet
- De Miguel 2017Document31 pagesDe Miguel 2017DinaNo ratings yet
- International Journal of Plasticity: L. Wu, L. Noels, L. Adam, I. DoghriDocument23 pagesInternational Journal of Plasticity: L. Wu, L. Noels, L. Adam, I. DoghriRasagya MishraNo ratings yet
- 6441-Article Text-21271-2-10-20210520Document31 pages6441-Article Text-21271-2-10-20210520A HNo ratings yet
- Wang 2003Document20 pagesWang 2003Krešo IvišićNo ratings yet
- Non-Linear Analysis of Unbolted Base Plates by The FEMDocument13 pagesNon-Linear Analysis of Unbolted Base Plates by The FEMGanesh JagadaleNo ratings yet
- Implementation of The Strain Gradient Plasticity With Linear Finite Elements and Reduced IntegrationDocument2 pagesImplementation of The Strain Gradient Plasticity With Linear Finite Elements and Reduced IntegrationMonir SamirNo ratings yet
- Comput. Methods Appl. Mech. Engrg.: H. Nguyen-Xuan, G.R. Liu, C. Thai-Hoang, T. Nguyen-ThoiDocument19 pagesComput. Methods Appl. Mech. Engrg.: H. Nguyen-Xuan, G.R. Liu, C. Thai-Hoang, T. Nguyen-ThoiAhmed MabroukNo ratings yet
- Implementation and Numerical Verification of A Non-Linear Homogenization Method Applied To Hyperelastic CompositesDocument11 pagesImplementation and Numerical Verification of A Non-Linear Homogenization Method Applied To Hyperelastic CompositesDonald ZekaNo ratings yet
- Jmse 07 00340 v2Document24 pagesJmse 07 00340 v2JangdiniNo ratings yet
- 2013 Bruggi Duysinx A Stress-Based Approach To The Optimal Design of Structures With UnilateralDocument16 pages2013 Bruggi Duysinx A Stress-Based Approach To The Optimal Design of Structures With UnilateralDamian KowalskiNo ratings yet
- Finite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıDocument9 pagesFinite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıNikNo ratings yet
- Abu Husain, Haddad Khodaparast, Ouyang - 2012 - Parameter Selection and Stochastic Model Updating Using Perturbation Methods With ParameDocument18 pagesAbu Husain, Haddad Khodaparast, Ouyang - 2012 - Parameter Selection and Stochastic Model Updating Using Perturbation Methods With ParameIamzura AbdullahNo ratings yet
- An Adaptive Concurrent Multiscale Model For Concrete Based On Coupling Finite ElementsDocument21 pagesAn Adaptive Concurrent Multiscale Model For Concrete Based On Coupling Finite ElementsNikhilesh ZangestuNo ratings yet
- Discrete Element Modelling of Large Scale Particle Systems-I: Exact Scaling LawsDocument11 pagesDiscrete Element Modelling of Large Scale Particle Systems-I: Exact Scaling LawsMuhammad Adnan LaghariNo ratings yet
- Smoothed Particle Hydrodynamics (SPH) : An Overview and Recent DevelopmentsDocument52 pagesSmoothed Particle Hydrodynamics (SPH) : An Overview and Recent DevelopmentsPac Agathe100% (1)
- Topology Optimization of Sheet Metal Brackets Using ANSYSDocument7 pagesTopology Optimization of Sheet Metal Brackets Using ANSYSMarcoNo ratings yet
- 1 s2.0 S0263822321003755 MainDocument9 pages1 s2.0 S0263822321003755 MainMusic TrapsNo ratings yet
- Asadpoure Et Al. - 2017 - Topology Optimization of Multiphase Architected MaDocument16 pagesAsadpoure Et Al. - 2017 - Topology Optimization of Multiphase Architected Majuan david pérez garcíaNo ratings yet
- Domain Decomposition Methods: Research Project C10Document2 pagesDomain Decomposition Methods: Research Project C10Chandra ClarkNo ratings yet
- Nonlinear Time-History Earthquake Analysis For Steel FramesDocument18 pagesNonlinear Time-History Earthquake Analysis For Steel FramesMustafa LimdiwalaNo ratings yet
- On The Pareto Optimum Sensitivity Analysis in Multicriteria OptimizationDocument23 pagesOn The Pareto Optimum Sensitivity Analysis in Multicriteria Optimizationdtn2008No ratings yet
- Applied Sciences: Elastoplastic Analysis of Frame Structures Using Radial Point Interpolation Meshless MethodsDocument27 pagesApplied Sciences: Elastoplastic Analysis of Frame Structures Using Radial Point Interpolation Meshless MethodsfelipaoNo ratings yet
- Accepted Manuscript: Composite StructuresDocument36 pagesAccepted Manuscript: Composite Structureshamid rezaNo ratings yet
- Solution of Confined Seepage Problems Below Hydraulic Structures by Finite Element MethodDocument13 pagesSolution of Confined Seepage Problems Below Hydraulic Structures by Finite Element MethodMoiz Khan YousufzaiNo ratings yet
- Static, Free Vibration, and Buckling Analyses of Laminated Composite Plates Via An Isogeometric Meshfree Collocation ApproachDocument31 pagesStatic, Free Vibration, and Buckling Analyses of Laminated Composite Plates Via An Isogeometric Meshfree Collocation ApproachkoulliredouaneNo ratings yet
- Application of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionDocument17 pagesApplication of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionNavoar FormaitNo ratings yet
- Sofa MechanicsDocument15 pagesSofa MechanicslahsivlahsivNo ratings yet
- Dimas2015 PDFDocument10 pagesDimas2015 PDFKamel FedaouiNo ratings yet
- Computational Homogenization For Multiscale CrackDocument43 pagesComputational Homogenization For Multiscale CrackAmina DinariNo ratings yet
- Non-Prismatic Timoshenko-Like Beam Model: Numerical Solution Via Isogeometric CollocationDocument12 pagesNon-Prismatic Timoshenko-Like Beam Model: Numerical Solution Via Isogeometric CollocationMathewsJoshNo ratings yet
- 8PH0 01 Que 20160525Document28 pages8PH0 01 Que 20160525Rahma SalamaNo ratings yet
- Plant Flow Measurement and Control Handbook 1St Edition Swapan Basu All ChapterDocument52 pagesPlant Flow Measurement and Control Handbook 1St Edition Swapan Basu All Chaptermarla.jones223100% (8)
- Chapter 21 - SE202Document10 pagesChapter 21 - SE202rpatel5509No ratings yet
- Datasheet For Steel Grades Structure Steel 45HDocument2 pagesDatasheet For Steel Grades Structure Steel 45HZvonimir OpicNo ratings yet
- Engine Identification: WarningDocument34 pagesEngine Identification: WarningLuis RodriguezNo ratings yet
- Construction Equipment (7 8 9) : Dr. Hossam Mohamed TomaDocument31 pagesConstruction Equipment (7 8 9) : Dr. Hossam Mohamed TomaAmr RaghebNo ratings yet
- Adw TR RTCF QP Me 002, Rev.1Document38 pagesAdw TR RTCF QP Me 002, Rev.1Rijwan MohammadNo ratings yet
- Plano Hidraulico PDFDocument2 pagesPlano Hidraulico PDFAnthonyCruzYordanNo ratings yet
- Solved Problem 6Document6 pagesSolved Problem 6JosephNo ratings yet
- Min Plumbing FacilitiesDocument11 pagesMin Plumbing FacilitiesPronton, Hermie F.No ratings yet
- Adwea Approved Vendors List PDFDocument310 pagesAdwea Approved Vendors List PDFMrmshatta Elrady100% (1)
- Liebherr Technical Data DPVG PDFDocument66 pagesLiebherr Technical Data DPVG PDFbee140676No ratings yet
- Gaskets: Standard Definitions of Terms Relating ToDocument2 pagesGaskets: Standard Definitions of Terms Relating ToAhmad Zubair RasulyNo ratings yet
- Fbqdavet PDFDocument2 pagesFbqdavet PDFgiaple100% (1)
- Fractal Impeller Amol KulkarniDocument10 pagesFractal Impeller Amol KulkarniTej ChoksiNo ratings yet
- Kaiser and Cai (2012) Design of Rock Support System Under Rockburst ConditionDocument13 pagesKaiser and Cai (2012) Design of Rock Support System Under Rockburst Conditionkentong.leeNo ratings yet
- The Von Mises Yield CriterionDocument4 pagesThe Von Mises Yield CriterionHeinz D'Curva SudNo ratings yet
- STARTING SYSTEM STRDocument22 pagesSTARTING SYSTEM STRciro_svNo ratings yet
- Water Tank Design-AdaniDocument20 pagesWater Tank Design-AdaniHemant SonawadekarNo ratings yet
- Quick Review Is 6403Document2 pagesQuick Review Is 6403Kanaiyalal N. ShethNo ratings yet
- Rheem CONTEMPO SeriesDocument1 pageRheem CONTEMPO SeriesConrad GutierrezNo ratings yet
- Condition Monitoring of Steam Turbines by Performance AnalysisDocument25 pagesCondition Monitoring of Steam Turbines by Performance Analysisabuhurairaqazi100% (2)
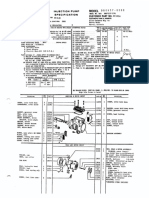
- Customer Part No. 4514954: Injection Pump Specification Model Ik) DelDocument2 pagesCustomer Part No. 4514954: Injection Pump Specification Model Ik) DeldieselmotorsbogotasasNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesJade MarabellaNo ratings yet
- Design Calculation For ScaffoldingDocument7 pagesDesign Calculation For ScaffoldingVediyappan kNo ratings yet
- Jacket Water HeaterDocument3 pagesJacket Water Heatersahil0% (1)
- SubSonex KitplanesDocument20 pagesSubSonex KitplanesDedyScrNo ratings yet