You might also like
- Exercices d'intégrales de lignes, de surfaces et de volumesFrom EverandExercices d'intégrales de lignes, de surfaces et de volumesNo ratings yet
- TD 1 Mécanique Du PointDocument4 pagesTD 1 Mécanique Du Pointyassir100% (1)
- Ex4 P9 Dipoles RC RL Et RLCDocument1 pageEx4 P9 Dipoles RC RL Et RLCtarik0% (1)
- Examen Electrocinetique 2020Document2 pagesExamen Electrocinetique 2020Farida LimaNo ratings yet
- Courant TransitoiresDocument16 pagesCourant TransitoiresMbaira LeilaNo ratings yet
- Examen de Rattrapage+solution 2020-2021 PDFDocument3 pagesExamen de Rattrapage+solution 2020-2021 PDFIsmail EssNo ratings yet
- 2012 2013DM5 PDFDocument25 pages2012 2013DM5 PDFbadreNo ratings yet
- Serie TD Phys2 21-22 SolutionsDocument12 pagesSerie TD Phys2 21-22 SolutionsMinàà Lyèèèn 1No ratings yet
- Traqueur Du Soleil (Corrigé)Document5 pagesTraqueur Du Soleil (Corrigé)bhasalma220No ratings yet
- Devoir de Synthèse N°1 - Physique-Chimie - 2ème Sciences (2010-2011) MR Abdelouaheb AâmelDocument3 pagesDevoir de Synthèse N°1 - Physique-Chimie - 2ème Sciences (2010-2011) MR Abdelouaheb AâmelBk AyoutessNo ratings yet
- Cours 5 - Equilibre D'un Corps Solide Soumis À Deux ForcesDocument2 pagesCours 5 - Equilibre D'un Corps Solide Soumis À Deux ForcesAicha El alaoui0% (1)
- Cours 3 Filtres PassifsDocument11 pagesCours 3 Filtres PassifsDaniel King-zock100% (1)
- Terminale - CE - Circuit en Régime Sinusoïdal ForcéDocument10 pagesTerminale - CE - Circuit en Régime Sinusoïdal ForcéBabacar TounkaraNo ratings yet
- Exercice N°1:: 3 Math AS: 2020/2122 Prof:Ben Abdallah .ADocument2 pagesExercice N°1:: 3 Math AS: 2020/2122 Prof:Ben Abdallah .AJoe Finianos100% (1)
- Selection C PDFDocument166 pagesSelection C PDFMalick DiopNo ratings yet
- DiodesDocument5 pagesDiodesaziz11azNo ratings yet
- Chapitre 1 Notions de Base Sur Les CircuitsDocument31 pagesChapitre 1 Notions de Base Sur Les CircuitsSimo Fidoudi100% (1)
- Ec2 TDDocument4 pagesEc2 TDzied houanebNo ratings yet
- Electricite 02 TD 03 - CompressedDocument17 pagesElectricite 02 TD 03 - CompressedBvmbv SeneNo ratings yet
- PT 11 Oscillateurs TDDocument12 pagesPT 11 Oscillateurs TDEliaç EphaNo ratings yet
- TD Corrigés D'électromagnétismeDocument16 pagesTD Corrigés D'électromagnétismeHamid ZitouniNo ratings yet
- EXERCICE 30.7-: Optique OndulatoireDocument2 pagesEXERCICE 30.7-: Optique Ondulatoirefrançois dupontNo ratings yet
- TD1Document2 pagesTD1Möräđ ÄbNo ratings yet
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (1)
- TD Ensaj1Document4 pagesTD Ensaj1Fatima Zahra Ait BnNo ratings yet
- Exam EnsDocument50 pagesExam EnsSalimDeepSide100% (1)
- Champ Mag FORCE L. L. INDUCT CIRCUIDocument14 pagesChamp Mag FORCE L. L. INDUCT CIRCUImk_garba_dmNo ratings yet
- TD1 2 CorrigéDocument6 pagesTD1 2 CorrigéHedi SbouiNo ratings yet
- Correction Fiche TD01 Et 02Document19 pagesCorrection Fiche TD01 Et 02Caris TchobsiNo ratings yet
- TS - BAC Blanc N°1 - ObligatoireDocument9 pagesTS - BAC Blanc N°1 - ObligatoirephytanjaNo ratings yet
- Analyse D'une Dipôle RL - SuperprofDocument17 pagesAnalyse D'une Dipôle RL - Superprofالغزيزال الحسن EL GHZIZAL HassaneNo ratings yet
- TD6 MP Mouvement À Forces Centrales 2020-2021 - 230511 - 012958Document4 pagesTD6 MP Mouvement À Forces Centrales 2020-2021 - 230511 - 012958RamboAkkkoNo ratings yet
- TD Dynamique1Document2 pagesTD Dynamique1Mak AlNo ratings yet
- Exercices en Meca Rar PDFDocument2 pagesExercices en Meca Rar PDFMohammed Bouchelarm100% (1)
- Mesure Et Essai 1ereDocument1 pageMesure Et Essai 1ereEssotina DADJA100% (1)
- TP N° 04 EléctricitéDocument9 pagesTP N° 04 EléctricitéElectronic GamesNo ratings yet
- CHAPITRE 1 Les Lois de L'electrocinétique GCDocument27 pagesCHAPITRE 1 Les Lois de L'electrocinétique GCHassna EzzouaouiNo ratings yet
- Correction TD2 - Calculs de PH (Exos 4,5,6,7,8) V2Document9 pagesCorrection TD2 - Calculs de PH (Exos 4,5,6,7,8) V2Amir NadeauNo ratings yet
- TransistorsDocument12 pagesTransistorslilasaid2010No ratings yet
- Série 4 Electronique RSF CPGE 2023Document3 pagesSérie 4 Electronique RSF CPGE 2023copie masterNo ratings yet
- Exc Force InertieDocument9 pagesExc Force InertieRommel NguyenNo ratings yet
- Serie2 PhysiquesDocument5 pagesSerie2 PhysiquesJabri ImeneNo ratings yet
- Mesure Inertie WWW - Cybertec Pendule Trois FilsDocument4 pagesMesure Inertie WWW - Cybertec Pendule Trois Filsern_43No ratings yet
- TD7: Séries de Fourier: Bts Esa Prof: Ismail OuariagliDocument3 pagesTD7: Séries de Fourier: Bts Esa Prof: Ismail OuariagliCrazy ytNo ratings yet
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFIl NBNo ratings yet
- CHAPITRE I Théorie Des ChampsDocument15 pagesCHAPITRE I Théorie Des ChampsM'pounguiNo ratings yet
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxDocument5 pagesTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhNo ratings yet
- Série D'exercices - Sciences Physiques - Oscillations Électriques Forcées - Bac Informatique (2014-2015) MR Daghsni SahbiDocument4 pagesSérie D'exercices - Sciences Physiques - Oscillations Électriques Forcées - Bac Informatique (2014-2015) MR Daghsni SahbiMahmoud Essahbi Sahbi Daghsni50% (2)
- Corrige TD DispersionDocument8 pagesCorrige TD DispersionAnouar AlaouiNo ratings yet
- Cours Oscill Elect ForcéesDocument7 pagesCours Oscill Elect ForcéesSdiri JamelNo ratings yet
- EXERCICE 2 Sur Le Dipole RCDocument5 pagesEXERCICE 2 Sur Le Dipole RCvilla rabeh100% (1)
- Mesures 2Document5 pagesMesures 2Emmanuel VovonouNo ratings yet
- Dipole RL Prof - Sbiro (WWW - Pc1.ma)Document5 pagesDipole RL Prof - Sbiro (WWW - Pc1.ma)lahcen essNo ratings yet
- Examen-Rattrapage - SMP-S4 - Electricité III - 2019-2020Document2 pagesExamen-Rattrapage - SMP-S4 - Electricité III - 2019-2020anas habachiNo ratings yet
- 5384 Ab 324 Ec 68Document6 pages5384 Ab 324 Ec 68Mohamed El OuahdaniNo ratings yet
- Cours ElectricitéDocument115 pagesCours ElectricitéSannadNo ratings yet
- Exercices d'optique et d'électromagnétismeFrom EverandExercices d'optique et d'électromagnétismeRating: 5 out of 5 stars5/5 (1)
- TP CBR Laboratoire MateriauxDocument7 pagesTP CBR Laboratoire Materiauxlezard83% (12)
- DS1 4Document5 pagesDS1 4GastØn El GassNo ratings yet
- Guide Entrainement s1 Echauffements EtirementsDocument18 pagesGuide Entrainement s1 Echauffements EtirementsgastronomicaNo ratings yet
- Exercice Nombres Decimaux 1Document2 pagesExercice Nombres Decimaux 1Master GTHNo ratings yet
- PHY7 Mecanique Solide AnalytiqueDocument91 pagesPHY7 Mecanique Solide Analytiqueydethe100% (1)
- HEI Chimie-Organique 1999 CHIMIEDocument5 pagesHEI Chimie-Organique 1999 CHIMIENawal ZakriNo ratings yet
- Geologie RegionaleDocument36 pagesGeologie RegionaleAyoubElAoufy100% (4)
- Planches D'essaiDocument8 pagesPlanches D'essaiIsaac Newisnew0% (1)
- Séparateurs Modulaire de Voie SMV - SETRADocument6 pagesSéparateurs Modulaire de Voie SMV - SETRAalexoplayNo ratings yet
- Nevers Plage AteliersDocument3 pagesNevers Plage AteliersLe Journal du CentreNo ratings yet
- Correction Devoir 1 Ps2 20192020Document2 pagesCorrection Devoir 1 Ps2 20192020diallomarie2009No ratings yet
- Met T 25 TD PDocument4 pagesMet T 25 TD Pkhocine67% (3)
- La Neige CeDocument3 pagesLa Neige CeEkaterinaNo ratings yet
- Jerk PDFDocument4 pagesJerk PDFالغزيزال الحسن EL GHZIZAL HassaneNo ratings yet
- Elisée Reclus - L'Homme Et La Terre - 2Document582 pagesElisée Reclus - L'Homme Et La Terre - 2alcyon48100% (1)
- Angles Et Valeurs Remarquables Du Cercle Trigonometrique Corriges D ExercicesDocument1 pageAngles Et Valeurs Remarquables Du Cercle Trigonometrique Corriges D ExerciceswalidbaNo ratings yet
- Séance5 (Saut de Longueur)Document1 pageSéance5 (Saut de Longueur)Cherradi epsNo ratings yet
- Essai Proctor PDFDocument7 pagesEssai Proctor PDFbrahim_md100% (1)
- Programme Muscle UpDocument25 pagesProgramme Muscle UpNikoNo ratings yet
- 4e dc1 2010 2011 Doo PDFDocument3 pages4e dc1 2010 2011 Doo PDFKhairedine LatamnaNo ratings yet
- ClusterDocument7 pagesClusterouattararomualdNo ratings yet
- Série de Chimie - 4ème Année Sc. Exp - Technique & MathématiquesDocument3 pagesSérie de Chimie - 4ème Année Sc. Exp - Technique & MathématiquesأشرفالمبروكNo ratings yet
- Brevet (Math) Amerique Du Nord 7 Juin 2011Document5 pagesBrevet (Math) Amerique Du Nord 7 Juin 2011Karl-Patrick BarnesNo ratings yet
- Machines PDFDocument79 pagesMachines PDFSCORSAM1No ratings yet
- Semi 1h35Document2 pagesSemi 1h35Benamara YassineNo ratings yet
- Introduction À L'analyse Mathématique de L'équation de HelmholtzDocument23 pagesIntroduction À L'analyse Mathématique de L'équation de Helmholtzsamouille6666No ratings yet
- Scale ExercisesDocument1 pageScale ExercisesEm AlcantaraNo ratings yet
- Price List With CSVDocument12 pagesPrice List With CSVedelzNo ratings yet
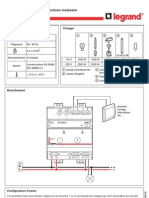
- Interrupteur Multifonctions Modulaire 036 00: Charges CaractéristiquesDocument8 pagesInterrupteur Multifonctions Modulaire 036 00: Charges CaractéristiquesEric BalazNo ratings yet
- C6 TDDocument2 pagesC6 TDKld Mnt0% (1)