You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Solutions Manual Continuum Mechanics Lai 4th EdittionDocument246 pagesSolutions Manual Continuum Mechanics Lai 4th Edittiondiego_dave89% (18)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Whole Curriculum of Mathematics in The NetherlandsDocument15 pagesThe Whole Curriculum of Mathematics in The Netherlandserikatsma75% (4)
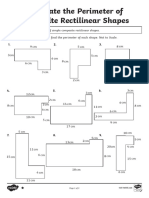
- 2.3 Perimeter Varios Shapes Measure and Calculate - Compound Shape Activity Sheet 3Document8 pages2.3 Perimeter Varios Shapes Measure and Calculate - Compound Shape Activity Sheet 3Aarti PadiaNo ratings yet
- Regulatory Circular RG14-013Document4 pagesRegulatory Circular RG14-013Ranjan BasuNo ratings yet
- State of Devops: Presented by Sponsored byDocument48 pagesState of Devops: Presented by Sponsored byRanjan BasuNo ratings yet
- Occ BylawsDocument247 pagesOcc BylawsRanjan BasuNo ratings yet
- 2019 State of Devops Report Puppet Circleci Splunk - SML 1 1 PDFDocument86 pages2019 State of Devops Report Puppet Circleci Splunk - SML 1 1 PDFSuraj PatilNo ratings yet
- Health Care and Competition Law and PolicyDocument7 pagesHealth Care and Competition Law and PolicyRanjan BasuNo ratings yet
- Regulatory Circular RG13-019: To: From: REDocument4 pagesRegulatory Circular RG13-019: To: From: RERanjan BasuNo ratings yet
- Gladish 2009 - DeRham Cohology EssentialsDocument49 pagesGladish 2009 - DeRham Cohology EssentialsRanjan BasuNo ratings yet
- Competition Policy Tel 20080508104446Document94 pagesCompetition Policy Tel 20080508104446Ranjan BasuNo ratings yet
- Healthcare Market Competition 1998Document74 pagesHealthcare Market Competition 1998Ranjan BasuNo ratings yet
- PIMCO Global Advantage Inflation-Linked Bond Index ProfileDocument0 pagesPIMCO Global Advantage Inflation-Linked Bond Index ProfileRanjan BasuNo ratings yet
- Mum dn1 CanDocument2 pagesMum dn1 CanRanjan BasuNo ratings yet
- Carpenter & Petersen 2005 - Capital Market Imperfections, High-Tech Investment, and New Equity FinancingDocument40 pagesCarpenter & Petersen 2005 - Capital Market Imperfections, High-Tech Investment, and New Equity FinancingRanjan BasuNo ratings yet
- Hestnes 1986 - A Unified Language For Mathematics and PhysicsDocument18 pagesHestnes 1986 - A Unified Language For Mathematics and PhysicsRanjan BasuNo ratings yet
- Hestnes 1986 - Clifford Algebra and The Interpretation of Quantum MechanicsDocument18 pagesHestnes 1986 - Clifford Algebra and The Interpretation of Quantum MechanicsRanjan BasuNo ratings yet
- Second Order DecisionsDocument37 pagesSecond Order DecisionsRanjan BasuNo ratings yet
- Frisco 2007 - Infnite Hierarchies of Conformon-P SystemsDocument15 pagesFrisco 2007 - Infnite Hierarchies of Conformon-P SystemsRanjan BasuNo ratings yet
- Ben-Shahar 2010 - Unlicensed UseDocument38 pagesBen-Shahar 2010 - Unlicensed UseRanjan BasuNo ratings yet
- Cultural Distance 2007Document43 pagesCultural Distance 2007Ranjan BasuNo ratings yet
- Amartya Sen 2000 - Role of Legal and Judicial Reform in DevelopmentDocument29 pagesAmartya Sen 2000 - Role of Legal and Judicial Reform in DevelopmentRanjan BasuNo ratings yet
- Punam Gupta 2010 - Performance of Indian ManufacturingDocument32 pagesPunam Gupta 2010 - Performance of Indian ManufacturingRanjan BasuNo ratings yet
- Sunstein 2001 - Probability NeglectDocument36 pagesSunstein 2001 - Probability NeglectRanjan BasuNo ratings yet
- Mathematics: Quarter 3 - Module 9Document27 pagesMathematics: Quarter 3 - Module 9Pat So100% (1)
- Challenges and Technologies in Reservoir ModelingDocument23 pagesChallenges and Technologies in Reservoir Modelingsong LiNo ratings yet
- Séries de BravisDocument44 pagesSéries de BravistauchragaNo ratings yet
- Basic Principles of Perspective Drawing For The Technical IllustratorDocument10 pagesBasic Principles of Perspective Drawing For The Technical IllustratorMaurice Manese100% (1)
- Geometry of Hamiltonian Dynamics With Conformal Eisenhart MetricDocument27 pagesGeometry of Hamiltonian Dynamics With Conformal Eisenhart MetricsggtioNo ratings yet
- Physics: Crash Course For JEE Main 2020Document15 pagesPhysics: Crash Course For JEE Main 2020Santhosh SenthilNo ratings yet
- RRL Sa Smaw OfcDocument1 pageRRL Sa Smaw OfcRen ConcepcionNo ratings yet
- Extensions of A Theorem of Van Aubel: 1 Introduction and PreliminariesDocument11 pagesExtensions of A Theorem of Van Aubel: 1 Introduction and PreliminariesTom DavisNo ratings yet
- Physics Paper - I - Question Paper - PDFDocument10 pagesPhysics Paper - I - Question Paper - PDFvarun jhaNo ratings yet
- En (1370)Document1 pageEn (1370)reacharunkNo ratings yet
- StewartCalcET8 14 04Document18 pagesStewartCalcET8 14 04OhoodKAlesayiNo ratings yet
- ARML TheoremsDocument27 pagesARML Theoremsfreefall014No ratings yet
- Critical Point TheoryDocument99 pagesCritical Point TheoryGeorge ProtopapasNo ratings yet
- Geometry 4 Solutions UHSMCDocument9 pagesGeometry 4 Solutions UHSMCWalker KroubalkianNo ratings yet
- Ncert Solutions Class 10 Maths Chapter 7 Coordinate GeometryDocument57 pagesNcert Solutions Class 10 Maths Chapter 7 Coordinate GeometryBhavik DhakaNo ratings yet
- Pythagoras Legacy Mathematics in Ten Great Ideas (Marcel Danesi) (Z-Library)Document231 pagesPythagoras Legacy Mathematics in Ten Great Ideas (Marcel Danesi) (Z-Library)Seyfullayev FaridNo ratings yet
- Problem Sheet 2Document4 pagesProblem Sheet 2Qingpo WuwuNo ratings yet
- 5.shadow Angle & CalculationDocument24 pages5.shadow Angle & CalculationDhiraj Shakya67% (3)
- Complex Numbers: For More Material Join: @jeeadvanced - 2024Document187 pagesComplex Numbers: For More Material Join: @jeeadvanced - 2024utsosarkar1No ratings yet
- Module 2: Resultant of Force SystemsDocument24 pagesModule 2: Resultant of Force SystemsAshTzy OfficialNo ratings yet
- Year 9 Core Autumn B 2021Document16 pagesYear 9 Core Autumn B 2021sheikhaalfahdiNo ratings yet
- Angles Worksheet F1Document6 pagesAngles Worksheet F1raudatunnur87No ratings yet
- Worksheet Q3 Week 4Document4 pagesWorksheet Q3 Week 4Jaybie TejadaNo ratings yet
- Tugas Kwantum AprilDocument30 pagesTugas Kwantum AprilIndah pratiwiNo ratings yet
- Balestier Hill Secondary SchoolDocument10 pagesBalestier Hill Secondary Schooltoh tim lamNo ratings yet
- f4 Solution of TrianglesDocument0 pagesf4 Solution of TrianglesvioletgohNo ratings yet
- Sp015 Nota Fizik Topic 2Document78 pagesSp015 Nota Fizik Topic 2Khairul ImranNo ratings yet