You might also like
- Import Ext 1234 Tri Fect7Document3 pagesImport Ext 1234 Tri Fect7Angell Eduardo Razuri BuchelliNo ratings yet
- Importar Código SiomDocument3 pagesImportar Código SiomAngell Eduardo Razuri BuchelliNo ratings yet
- SPSS Macros y Auditoría ExcelDocument18 pagesSPSS Macros y Auditoría ExcelAngell Eduardo Razuri BuchelliNo ratings yet
- Comandos at ArduinoDocument6 pagesComandos at ArduinoAlejandra RativaNo ratings yet
- Import Ext 1234 Tri Fect2Document2 pagesImport Ext 1234 Tri Fect2Angell Eduardo Razuri BuchelliNo ratings yet
- RNEDocument400 pagesRNEDayDreaminNo ratings yet
- Material de Computacion II - Temas #17Document21 pagesMaterial de Computacion II - Temas #17Angell Eduardo Razuri BuchelliNo ratings yet
- Import Ext 1234 Tri Fect5Document3 pagesImport Ext 1234 Tri Fect5Angell Eduardo Razuri BuchelliNo ratings yet
- Import Ext 1234 Tri FectDocument60 pagesImport Ext 1234 Tri FectAngell Eduardo Razuri BuchelliNo ratings yet
- Material de Computacion II - Temas #20Document13 pagesMaterial de Computacion II - Temas #20Angell Eduardo Razuri Buchelli100% (1)
- Ejercicios de CorteDocument4 pagesEjercicios de CorteAngell Eduardo Razuri BuchelliNo ratings yet
- Material de Computacion II - Temas #18Document14 pagesMaterial de Computacion II - Temas #18Erick Estrada PuicònNo ratings yet
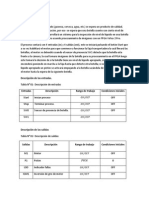
- Descripción de Las Entradas y SalidasDocument4 pagesDescripción de Las Entradas y SalidasAngell Eduardo Razuri BuchelliNo ratings yet
- Reglamento de Zonificación General de Uso de Suelo de TrujilloDocument26 pagesReglamento de Zonificación General de Uso de Suelo de TrujilloMajo Cerna PeredaNo ratings yet
- Soldar MicroChipDocument12 pagesSoldar MicroChipAlejandro De FariaNo ratings yet
- Converted File 9226d802Document10 pagesConverted File 9226d802Angell Eduardo Razuri BuchelliNo ratings yet
- Exp Pataz KitdematDocument1 pageExp Pataz KitdematAngell Eduardo Razuri BuchelliNo ratings yet
- ComandosdeCisco PDFDocument15 pagesComandosdeCisco PDFagonias_delrioNo ratings yet
- Control de Mensajes SMS A Través de Un PICDocument16 pagesControl de Mensajes SMS A Través de Un PICnando_96No ratings yet
- 2d120x Ir Distance SensorDocument0 pages2d120x Ir Distance SensorVictor UngureanNo ratings yet
- Manual TxRail 4-20 MaDocument2 pagesManual TxRail 4-20 MaAngell Eduardo Razuri BuchelliNo ratings yet
- PLL Curso PDFDocument6 pagesPLL Curso PDFlu1agpNo ratings yet
- l07 Power SCR PteDocument3 pagesl07 Power SCR PteAngell Eduardo Razuri BuchelliNo ratings yet
- Prodiso LaboDocument2 pagesProdiso LaboAngell Eduardo Razuri BuchelliNo ratings yet
- Manual TxRail 4-20 MaDocument2 pagesManual TxRail 4-20 MaAngell Eduardo Razuri BuchelliNo ratings yet
- Informe PDFDocument63 pagesInforme PDFAngell Eduardo Razuri BuchelliNo ratings yet
- Transm I SoresDocument2 pagesTransm I SoresAngell Eduardo Razuri BuchelliNo ratings yet
- L09 PutDocument4 pagesL09 PutAngell Eduardo Razuri BuchelliNo ratings yet
- Interfaz USB Generica para Comunicacion Con Dispositivos ElectronicosDocument40 pagesInterfaz USB Generica para Comunicacion Con Dispositivos ElectronicosAngell Eduardo Razuri BuchelliNo ratings yet
- Sesion 3 y 4Document3 pagesSesion 3 y 4Mura Pedro TrainerNo ratings yet
- Voleibol Adaptado en Espacios Reducidos 1391929298Document11 pagesVoleibol Adaptado en Espacios Reducidos 1391929298Deisy LilianaNo ratings yet
- Kickingball 2Document30 pagesKickingball 2Angelica ChavezNo ratings yet
- S13. s1 s2 Ejercicio de Transferencia G - 08Document12 pagesS13. s1 s2 Ejercicio de Transferencia G - 08brayan marceloNo ratings yet
- Formato Guia de ProductosDocument2 pagesFormato Guia de ProductosAlina JimenezNo ratings yet
- Planificación periodo preparatorio mesociclo introductorioDocument166 pagesPlanificación periodo preparatorio mesociclo introductorioCristian Eduardo RODRIGUEZ QUIROZNo ratings yet
- Bloque Ii VoleibolDocument46 pagesBloque Ii VoleibolNerea MartinezNo ratings yet
- Hoja de Operación #4 Ropa de Dama en Tejido PlanoDocument19 pagesHoja de Operación #4 Ropa de Dama en Tejido PlanocristinaNo ratings yet
- El Ajedrez Español 1957-18Document52 pagesEl Ajedrez Español 1957-18Майк КузнецовNo ratings yet
- Catálogo de Filtros Bosch 2006Document40 pagesCatálogo de Filtros Bosch 2006VarovNo ratings yet
- Análisis Técnico y Metodología para La Enseñanza de La Técnica Del RemateDocument15 pagesAnálisis Técnico y Metodología para La Enseñanza de La Técnica Del RemateTeffyNo ratings yet
- 1.se Busca Un Campeón - Proyecto PDFDocument13 pages1.se Busca Un Campeón - Proyecto PDFJavier Estelles MuñozNo ratings yet
- EL ESPAÑOL - Diario Digital, Plural, Libre, Indomable, TuyoDocument1 pageEL ESPAÑOL - Diario Digital, Plural, Libre, Indomable, TuyoMateo Aquiso PlanasNo ratings yet
- Universidad De San Carlos De Guatemala. Centro Universitario Del Norte- CUNOR. Facultad De Ciencias Médicas. Unidad Didáctica Bioquímica. Dr. Cuyuch. Informé Mapa MetabólicoDocument63 pagesUniversidad De San Carlos De Guatemala. Centro Universitario Del Norte- CUNOR. Facultad De Ciencias Médicas. Unidad Didáctica Bioquímica. Dr. Cuyuch. Informé Mapa MetabólicoEdy Roberto Leal100% (1)
- Fixture Del Mundial 2018 en ExcelDocument60 pagesFixture Del Mundial 2018 en ExcelJose SotoNo ratings yet
- Programacion de Partidos Futsal - 2da. FechaDocument1 pageProgramacion de Partidos Futsal - 2da. FechaKarin PalominoNo ratings yet
- Tes Kecermatan - Huruf HilangDocument2 pagesTes Kecermatan - Huruf HilangPande Adnyana100% (14)
- Tactica de BateoDocument5 pagesTactica de BateoPaul VargasNo ratings yet
- Educación Física - 4to, 5to y 6to GradoDocument15 pagesEducación Física - 4to, 5to y 6to GradogianperozaNo ratings yet
- 10 razas de perros más caras - desde $300 hasta $12MDocument13 pages10 razas de perros más caras - desde $300 hasta $12Mwilmer saraguroNo ratings yet
- La Lectura y Sus ViciosDocument5 pagesLa Lectura y Sus ViciosRomina CruzNo ratings yet
- Prueba Planea DiagnosticaDocument35 pagesPrueba Planea DiagnosticaGerardo OlayaNo ratings yet
- Autos Ene21Document243 pagesAutos Ene21Rarities edicionesNo ratings yet
- Taller Evaluativo 10°-11° Segundo Periodo en El Área de Edu. Física Rec. y DepDocument3 pagesTaller Evaluativo 10°-11° Segundo Periodo en El Área de Edu. Física Rec. y DepKiara Hernández CruzNo ratings yet
- Tramo 1 - SC Rutina Mujer - 5 DiasDocument12 pagesTramo 1 - SC Rutina Mujer - 5 DiasMatias ZabalaNo ratings yet
- Metodos de Enseñanza Natacion 03 A 06 Años FINAL 2018Document103 pagesMetodos de Enseñanza Natacion 03 A 06 Años FINAL 2018Flo MorenoNo ratings yet
- 6° Registro - MatematicaDocument2 pages6° Registro - MatematicaVERONICA VALDIZAN VILLARNo ratings yet
- FIFA U-20 Women World Cup Regulations - ESDocument59 pagesFIFA U-20 Women World Cup Regulations - ESDavid CelisNo ratings yet
- TurnosDocument15 pagesTurnosfarmaciasbelaNo ratings yet
- 05 Informe Mensual Grupo 159 Mayo 2021Document5 pages05 Informe Mensual Grupo 159 Mayo 2021Enrique Martinez CampuzanoNo ratings yet