You might also like
- Solutions To Selected Problems-Duda, HartDocument12 pagesSolutions To Selected Problems-Duda, HartTiep VuHuu67% (3)
- Opgs-0-Tur-Opn-19-33-00 Turbine Generator Lube Oil System SopDocument12 pagesOpgs-0-Tur-Opn-19-33-00 Turbine Generator Lube Oil System SopSaravanan SundararajNo ratings yet
- A SEMINAR REPORT Chavan Indar Raj 1234 - 1Document21 pagesA SEMINAR REPORT Chavan Indar Raj 1234 - 1Indar Chavan100% (1)
- Notes and Solutions For: Pattern Recognition by Sergios Theodoridis and Konstantinos Koutroumbas.Document209 pagesNotes and Solutions For: Pattern Recognition by Sergios Theodoridis and Konstantinos Koutroumbas.Mehran Salehi100% (1)
- Detection Estimation and Modulation Theory Solution ManualDocument82 pagesDetection Estimation and Modulation Theory Solution ManualUfuk Tamer33% (3)
- Discriminant Analysis: 5.1 The Maximum Likelihood (ML) RuleDocument6 pagesDiscriminant Analysis: 5.1 The Maximum Likelihood (ML) RuleGeorge WangNo ratings yet
- CS771: Machine Learning: Tools, Techniques and Applications Mid-Semester ExamDocument7 pagesCS771: Machine Learning: Tools, Techniques and Applications Mid-Semester ExamanshulNo ratings yet
- Weatherwax Theodoridis SolutionsDocument212 pagesWeatherwax Theodoridis SolutionsRakeshNo ratings yet
- CPDDocument5 pagesCPDqwertyNo ratings yet
- (IT413P) Pattern Recognition Grade Four DR: Nagham MekkyDocument30 pages(IT413P) Pattern Recognition Grade Four DR: Nagham MekkyMustafa ElmalkyNo ratings yet
- The Annals of Statistics 10.1214/12-AOS1003 Institute of Mathematical StatisticsDocument36 pagesThe Annals of Statistics 10.1214/12-AOS1003 Institute of Mathematical Statisticsaskazy007No ratings yet
- Unit-Ii Bayesian Decision TheoryDocument22 pagesUnit-Ii Bayesian Decision TheoryJoyce GeorgeNo ratings yet
- 1.1 Metrics and Metric SpacesDocument4 pages1.1 Metrics and Metric SpaceshagostadesseNo ratings yet
- Assign 1Document5 pagesAssign 1darkmanhiNo ratings yet
- Bayes&Voice RecognitionDocument76 pagesBayes&Voice RecognitionEdgar ArroyoNo ratings yet
- Sergios Theodoridis Konstantinos KoutroumbasDocument80 pagesSergios Theodoridis Konstantinos KoutroumbasKumarNo ratings yet
- Class6 Prep ADocument7 pagesClass6 Prep AMariaTintashNo ratings yet
- Homework Decision SolutionsDocument3 pagesHomework Decision SolutionsAlireza ZahraNo ratings yet
- Homework1 SolutionsDocument5 pagesHomework1 SolutionsMohan VirkhareNo ratings yet
- Lecture 5Document16 pagesLecture 5Alireza MovahedianNo ratings yet
- Irreducible Polynomials That Factor Mod Every Prime: Reed JacobsDocument23 pagesIrreducible Polynomials That Factor Mod Every Prime: Reed JacobsValentioNo ratings yet
- Maximum Likelihood Decision Rules PDFDocument4 pagesMaximum Likelihood Decision Rules PDFOscar BarqueroNo ratings yet
- Propagation of Error or Uncertainty: Marcel Oliver December 4, 2015Document8 pagesPropagation of Error or Uncertainty: Marcel Oliver December 4, 20154r73m154No ratings yet
- Graphing Polynomial FunctionsDocument6 pagesGraphing Polynomial FunctionsKarylle Maica ContrerasNo ratings yet
- Christian Notes For Exam PDocument9 pagesChristian Notes For Exam Proy_getty100% (1)
- Minimizing The Mean of A Random Variable With One Real ParameterDocument7 pagesMinimizing The Mean of A Random Variable With One Real ParameterGeorge TsavdarisNo ratings yet
- Data Analysis For Social Scientists (14.1310x)Document12 pagesData Analysis For Social Scientists (14.1310x)SebastianNo ratings yet
- Bayes Decision Theory: How To Make Decisions in The Presence of Uncertainty?Document16 pagesBayes Decision Theory: How To Make Decisions in The Presence of Uncertainty?Derick MendozaNo ratings yet
- S1 Edexcel Revision PackDocument9 pagesS1 Edexcel Revision PackJFGHANSAHNo ratings yet
- Negative BinomialDocument5 pagesNegative BinomialJitendra K JhaNo ratings yet
- Pat 02 SolDocument5 pagesPat 02 Solmusalmanmusalman100% (1)
- Econometrics 1 Slide5Document29 pagesEconometrics 1 Slide5yingdong liuNo ratings yet
- Laplace Equations and The Weak Lefschetz ( (2012)Document21 pagesLaplace Equations and The Weak Lefschetz ( (2012)Matemáticas AsesoriasNo ratings yet
- Heavy Duty Math Writing: 1 Utilizing Large DelimitersDocument9 pagesHeavy Duty Math Writing: 1 Utilizing Large DelimitersCurtis HelmsNo ratings yet
- Consistency of One-Class SVM and Related AlgorithmsDocument8 pagesConsistency of One-Class SVM and Related AlgorithmsTungKVTNo ratings yet
- PDE 2011 ImpaDocument3 pagesPDE 2011 Impadiegofonseca06No ratings yet
- Statistics HandoutDocument15 pagesStatistics HandoutAnish GargNo ratings yet
- 1 Linear Transformations and Their Matrix Repre-SentationsDocument9 pages1 Linear Transformations and Their Matrix Repre-SentationsStelios KondosNo ratings yet
- Economics 536 Specification Tests in Simultaneous Equations ModelsDocument5 pagesEconomics 536 Specification Tests in Simultaneous Equations ModelsMaria RoaNo ratings yet
- Similarity MeasuresDocument11 pagesSimilarity MeasuresAnonymous GuQd67No ratings yet
- Random Variables PDFDocument64 pagesRandom Variables PDFdeelipNo ratings yet
- Figure 3Document5 pagesFigure 3FarisdaNo ratings yet
- Foss Lecture1Document32 pagesFoss Lecture1Jarsen21No ratings yet
- Neyman Pearson DetectorsDocument5 pagesNeyman Pearson DetectorsGuilherme DattoliNo ratings yet
- Math Q2 ReviewerDocument5 pagesMath Q2 ReviewerQuilestino, Ara Bella S.No ratings yet
- Unit-2 Statistical PRDocument26 pagesUnit-2 Statistical PRHimanshu SharmaNo ratings yet
- Laplace'S and Poisson'S EquationsDocument16 pagesLaplace'S and Poisson'S EquationsOBStaffNo ratings yet
- On Basic Concepts of StatisticsDocument24 pagesOn Basic Concepts of StatisticstimobechgerNo ratings yet
- Tamas Hardness DaDocument19 pagesTamas Hardness DaDreNo ratings yet
- Probability For Ai2Document8 pagesProbability For Ai2alphamale173No ratings yet
- Chapter 1 P 2Document30 pagesChapter 1 P 2EBAADUREHMAN KHANNo ratings yet
- Limits and Continuity (Calculus) Engineering Entrance Exams Question BankFrom EverandLimits and Continuity (Calculus) Engineering Entrance Exams Question BankNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Managerial Accounting Midterm ExamDocument9 pagesManagerial Accounting Midterm ExamElaine ChiaNo ratings yet
- CASE STUDY - Smart Stores Reinvent The Retail SpaceDocument1 pageCASE STUDY - Smart Stores Reinvent The Retail Spacetranthihien29604No ratings yet
- ISL VIDA Density Meter: ProvenDocument4 pagesISL VIDA Density Meter: ProvenkevinNo ratings yet
- Advertisement Management Advertising Appeal of Maggi Over The Past YearsDocument53 pagesAdvertisement Management Advertising Appeal of Maggi Over The Past YearsChandan Srivastava100% (2)
- Challenges Faced in Prefabrication or Modular ConstructionDocument13 pagesChallenges Faced in Prefabrication or Modular ConstructionIJRASETPublications0% (1)
- Laxman Logistics - WriteupDocument7 pagesLaxman Logistics - WriteupGagandeep PahwaNo ratings yet
- Russia Proves /'peak Oil/' Is A Misleading Zionist ScamDocument7 pagesRussia Proves /'peak Oil/' Is A Misleading Zionist ScamTyrone Drummond100% (5)
- MEET 416 Module 1Document16 pagesMEET 416 Module 1Kian MoradosNo ratings yet
- Filipino 101 - Date and TimeDocument124 pagesFilipino 101 - Date and TimeAnonymous jG86rkNo ratings yet
- RBI Grade 81Document67 pagesRBI Grade 81smkrishnan89100% (1)
- University of Central Punjab: Course Title: Performance StrategyDocument4 pagesUniversity of Central Punjab: Course Title: Performance StrategyAyesha HamidNo ratings yet
- Insurable Interest Doctrine What Is It and What Does It Mean Sorensen - April2011Document21 pagesInsurable Interest Doctrine What Is It and What Does It Mean Sorensen - April2011Jeff VuhashoNo ratings yet
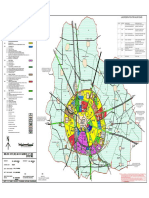
- Jhajjar Master PlanDocument1 pageJhajjar Master PlanMayank AhujaNo ratings yet
- 351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLMohamed SaeedNo ratings yet
- Customer Exit - SAP ABAPDocument15 pagesCustomer Exit - SAP ABAPTechnical DepartmentNo ratings yet
- NEQAS Enrollment Form V5.0Document1 pageNEQAS Enrollment Form V5.0code4sale50% (6)
- SIP-Based Media Recording (SIPREC)Document16 pagesSIP-Based Media Recording (SIPREC)Asit SwainNo ratings yet
- Read Letitia James's LetterDocument2 pagesRead Letitia James's LetterNewsdayNo ratings yet
- Reliance Growth Fund ProjectDocument69 pagesReliance Growth Fund ProjectVikram GundalaNo ratings yet
- Sassy The Sugar Glider-ENG-cheerful ChameleonDocument3 pagesSassy The Sugar Glider-ENG-cheerful Chameleon陈思易100% (2)
- 2013-6-mth-rpt-jul-dec-TBC's Latest 6-Month Report For The Period July To December 2013Document100 pages2013-6-mth-rpt-jul-dec-TBC's Latest 6-Month Report For The Period July To December 2013taisamyoneNo ratings yet
- A Survey On Weather Forecasting To Predict Rainfall Using Big DataDocument8 pagesA Survey On Weather Forecasting To Predict Rainfall Using Big DataSuraj SubramanianNo ratings yet
- IBS HyderabadDocument2 pagesIBS Hyderabadsai sumanthNo ratings yet
- Facing Death TogetherDocument1 pageFacing Death TogetherAlia MalikNo ratings yet
- IM in Traffic ManagementDocument117 pagesIM in Traffic ManagementKervie Jay LachaonaNo ratings yet
- 12690889Document184 pages12690889Devesh AgarwalNo ratings yet
- (English (Auto-Generated) ) The Next Step in Nanotechnology - George Tulevski (DownSub - Com)Document9 pages(English (Auto-Generated) ) The Next Step in Nanotechnology - George Tulevski (DownSub - Com)kath anonuevoNo ratings yet
- Modern Banking Services - A Key Tool For Banking Sector: Mobile No: 90038 12289Document6 pagesModern Banking Services - A Key Tool For Banking Sector: Mobile No: 90038 12289MD Hafizul Islam HafizNo ratings yet