You might also like
- FirDocument27 pagesFirvirat sharmaNo ratings yet
- FRM PDFDocument8 pagesFRM PDFMayank GangwarNo ratings yet
- Chapter4 PDFDocument11 pagesChapter4 PDFAmirul AizadNo ratings yet
- Tapering and Other Practical Considerations: X (F) Exp IDocument6 pagesTapering and Other Practical Considerations: X (F) Exp Ichrisna27No ratings yet
- Demodulation of FMDocument5 pagesDemodulation of FMTrần PhanNo ratings yet
- Complex Amplitude Filters For Extended Depth of FieldDocument3 pagesComplex Amplitude Filters For Extended Depth of FieldEriasuNo ratings yet
- Lab 5. FIR Filter Design in MatlabDocument14 pagesLab 5. FIR Filter Design in MatlabShreyash SillNo ratings yet
- A) Keeping The Central Values of The Centralized DFTDocument3 pagesA) Keeping The Central Values of The Centralized DFTMule Won TegeNo ratings yet
- Spectral Filtering Techniques for Time Series AnalysisDocument3 pagesSpectral Filtering Techniques for Time Series AnalysisPriyo TenanNo ratings yet
- Filter Basics: Ideal FiltersDocument8 pagesFilter Basics: Ideal FiltersPreeti SinghNo ratings yet
- University of Bremen University of Oldenburg Dept. of Communications Engineering Medical Physics Group 28334 Bremen, Germany 26111 Oldenburg, GermanyDocument4 pagesUniversity of Bremen University of Oldenburg Dept. of Communications Engineering Medical Physics Group 28334 Bremen, Germany 26111 Oldenburg, Germanyscribd1235207No ratings yet
- Ray 2006Document4 pagesRay 2006navneet1979No ratings yet
- FIR & IIR Filters in MATLABDocument11 pagesFIR & IIR Filters in MATLABKishore KumarNo ratings yet
- Course Work 1Document9 pagesCourse Work 1Mark FreemanNo ratings yet
- InTech-Fractional Delay Digital FiltersDocument27 pagesInTech-Fractional Delay Digital FiltersSidharth MahotraNo ratings yet
- Fast Fourier Transform (FFT)Document14 pagesFast Fourier Transform (FFT)Arash MazandaraniNo ratings yet
- Assignment 0f PMDocument14 pagesAssignment 0f PMMirza AzeemNo ratings yet
- Adjustable Fractional-Delay FIR Filters Using The Farrow Structure and Multirate TechniquesDocument4 pagesAdjustable Fractional-Delay FIR Filters Using The Farrow Structure and Multirate TechniquesSAJAN P PHILIP BITNo ratings yet
- UFMC Transceiver Complexity ReductionDocument8 pagesUFMC Transceiver Complexity ReductionHuy Nguyễn QuốcNo ratings yet
- Lab3 6Document21 pagesLab3 6Cool Angel100% (1)
- FFT Implementation and InterpretationDocument15 pagesFFT Implementation and InterpretationRiheen Ahsan100% (1)
- Wavelet IntroductionDocument13 pagesWavelet IntroductionABHISHEK BNo ratings yet
- FFT window and transform lengthsDocument5 pagesFFT window and transform lengthsNguyen Quoc DoanNo ratings yet
- 20ee10094 - HW 3 1Document6 pages20ee10094 - HW 3 1venkatarao HanumanthuNo ratings yet
- Linear filters for digital communicationsDocument5 pagesLinear filters for digital communicationsjoe2001coolNo ratings yet
- 6-Frequency Translation HandoutDocument4 pages6-Frequency Translation Handoutshazmina 44No ratings yet
- Data Converters1Document30 pagesData Converters1Vidyanand PattarNo ratings yet
- Fast Fourier TransformDocument8 pagesFast Fourier TransformnakarshaNo ratings yet
- University of Kentucky: EE 422G - Signals and Systems LaboratoryDocument5 pagesUniversity of Kentucky: EE 422G - Signals and Systems Laboratoryamina sayahNo ratings yet
- DFT Frequency Resolution TutorialDocument12 pagesDFT Frequency Resolution TutorialGABCCGNo ratings yet
- Understanding Ultra Narrowband ModulationDocument5 pagesUnderstanding Ultra Narrowband ModulationoldjanusNo ratings yet
- 9 HRTHDocument22 pages9 HRTHNithindev GuttikondaNo ratings yet
- AGuide To The FFTDocument14 pagesAGuide To The FFTakhemkaNo ratings yet
- Chapter II Half Wavelength Patch AntennaDocument47 pagesChapter II Half Wavelength Patch AntennaNeeraj RaoNo ratings yet
- Modulation and Demodulation of Analog Signals: Martin Kumm March 5, 2009Document11 pagesModulation and Demodulation of Analog Signals: Martin Kumm March 5, 2009herrberkNo ratings yet
- Speech Analysis and Synthesis For STFTDocument17 pagesSpeech Analysis and Synthesis For STFTzsyed92No ratings yet
- Chapter 4 Angle ModulationDocument18 pagesChapter 4 Angle ModulationAbdullah MasoodNo ratings yet
- A3-Fourier PropertiesDocument9 pagesA3-Fourier PropertiesJeff PeilNo ratings yet
- Analysis of The Fixed Window Functions in The Fractional Fourier DomainDocument7 pagesAnalysis of The Fixed Window Functions in The Fractional Fourier DomainseventhsensegroupNo ratings yet
- IMEKO2009 Filter PDFDocument4 pagesIMEKO2009 Filter PDFAbraham MuñozNo ratings yet
- FFTs and Oscilloscopes A Practical GuideDocument8 pagesFFTs and Oscilloscopes A Practical GuidecasagrandeNo ratings yet
- Fast Fourier Transform (FFT) : The FFT in One Dimension The FFT in Multiple DimensionsDocument10 pagesFast Fourier Transform (FFT) : The FFT in One Dimension The FFT in Multiple Dimensionsİsmet BurgaçNo ratings yet
- Fourier Properties DFT SpectrumDocument8 pagesFourier Properties DFT SpectrumjcvoscribNo ratings yet
- OFDM Paper - Independent Study - RIT - Rafael SueroDocument22 pagesOFDM Paper - Independent Study - RIT - Rafael SueroRafael Clemente Suero SamboyNo ratings yet
- Modulating Signal by MatlabDocument18 pagesModulating Signal by Matlabعلاء نعمان خيرالله C14No ratings yet
- Note For Lab2Document7 pagesNote For Lab2Mohd Asri RazaliNo ratings yet
- Identify The Mode Type (TEM, TM01 or TM10) by Looking at The Field DistributionDocument4 pagesIdentify The Mode Type (TEM, TM01 or TM10) by Looking at The Field DistributionDilaawaiz FazalNo ratings yet
- Short Term Spectral Analysis, Modification Discrete Fourier Transform Synthesis, andDocument4 pagesShort Term Spectral Analysis, Modification Discrete Fourier Transform Synthesis, andDeepak Kumar Singh Res. Scholar., Dept. of Mechanical Engg., IIT (BHU)No ratings yet
- Introduction To Communications Toolbox in Matlab 7Document97 pagesIntroduction To Communications Toolbox in Matlab 7Meonghun LeeNo ratings yet
- Fourier Theory & Practice, Part I: Theory: (HP Product Note 54600-4)Document10 pagesFourier Theory & Practice, Part I: Theory: (HP Product Note 54600-4)Cristian SpinelliNo ratings yet
- Reducing Front-End Bandwidth May Improve Digital GNSS Receiver PerformanceDocument6 pagesReducing Front-End Bandwidth May Improve Digital GNSS Receiver Performanceyaro82No ratings yet
- FM - Modulation DemodulationDocument26 pagesFM - Modulation DemodulationKunal MohiteNo ratings yet
- Me'Scopeves Application Note #1: The FFT, Leakage, and WindowingDocument8 pagesMe'Scopeves Application Note #1: The FFT, Leakage, and Windowingho-faNo ratings yet
- Band-Extended Angular Spectrum Method For Accurate Diffraction Calculation PDFDocument5 pagesBand-Extended Angular Spectrum Method For Accurate Diffraction Calculation PDFluo wangNo ratings yet
- Single Channel Phase-Aware Signal Processing in Speech Communication: Theory and PracticeFrom EverandSingle Channel Phase-Aware Signal Processing in Speech Communication: Theory and PracticeNo ratings yet
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionFrom EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionNo ratings yet
- Discrete Fourier Analysis and Wavelets: Applications to Signal and Image ProcessingFrom EverandDiscrete Fourier Analysis and Wavelets: Applications to Signal and Image ProcessingNo ratings yet
- Transitions from Digital Communications to Quantum Communications: Concepts and ProspectsFrom EverandTransitions from Digital Communications to Quantum Communications: Concepts and ProspectsNo ratings yet
- SIMCOM 900 GSM Module GSM GPRS Modem Features RS232 Interface TCP IP StackDocument3 pagesSIMCOM 900 GSM Module GSM GPRS Modem Features RS232 Interface TCP IP Stackammayi9845_930467904No ratings yet
- Superscripts: 2 2x 2x 2x Subscripts: X X X XDocument1 pageSuperscripts: 2 2x 2x 2x Subscripts: X X X Xammayi9845_930467904No ratings yet
- Carry-Select and Conditional-Sum AddersDocument14 pagesCarry-Select and Conditional-Sum Adderssivakumarb92No ratings yet
- Future Work Plan: Tasks by MonthDocument2 pagesFuture Work Plan: Tasks by Monthammayi9845_930467904No ratings yet
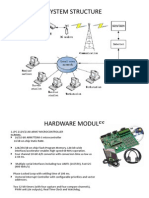
- System StructureDocument3 pagesSystem Structureammayi9845_930467904No ratings yet
- Lcd Interfacing with Lpc2148 MicrocontrollerDocument3 pagesLcd Interfacing with Lpc2148 Microcontrollerammayi9845_930467904No ratings yet
- Work plan for designing and testing a remote data acquisition systemDocument3 pagesWork plan for designing and testing a remote data acquisition systemammayi9845_930467904No ratings yet
- Continued: Detection of A/D ConvertionDocument2 pagesContinued: Detection of A/D Convertionammayi9845_930467904No ratings yet
- Work Done Till First ReviewDocument3 pagesWork Done Till First Reviewammayi9845_930467904No ratings yet
- Data Acquisition - Why 3G?Document3 pagesData Acquisition - Why 3G?ammayi9845_930467904No ratings yet
- February: Interfacing Multiple Sensors Using Wireless Network and Using Visual Software Display On MonitorDocument3 pagesFebruary: Interfacing Multiple Sensors Using Wireless Network and Using Visual Software Display On Monitorammayi9845_930467904No ratings yet
- MayaDocument1 pageMayaammayi9845_930467904No ratings yet
- Phytomonitoring System: Data Colection Software SensorsDocument3 pagesPhytomonitoring System: Data Colection Software Sensorsammayi9845_930467904No ratings yet
- Agenda: Phytomonitoring System Recommended Setup Block Diagram Work Done Future Work Plan ReferenceDocument3 pagesAgenda: Phytomonitoring System Recommended Setup Block Diagram Work Done Future Work Plan Referenceammayi9845_930467904No ratings yet
- 1 ADocument2 pages1 Aammayi9845_930467904No ratings yet
- Work Flow ChartDocument3 pagesWork Flow Chartammayi9845_930467904No ratings yet
- Design RequirementsDocument2 pagesDesign Requirementsammayi9845_930467904No ratings yet
- New Proj - SynopsisDocument2 pagesNew Proj - Synopsisammayi9845_930467904No ratings yet
- Swami Proj. ProposalDocument1 pageSwami Proj. Proposalammayi9845_930467904No ratings yet
- 1Document4 pages1ammayi9845_930467904No ratings yet
- Comp AnimationDocument1 pageComp Animationammayi9845_930467904No ratings yet
- Xmatchpro 64Document2 pagesXmatchpro 64ammayi9845_930467904No ratings yet
- Swami New Proj - ProposalDocument1 pageSwami New Proj - Proposalammayi9845_930467904No ratings yet
- Design RequirementsDocument5 pagesDesign Requirementsammayi9845_930467904No ratings yet
- SynopsisDocument6 pagesSynopsisammayi9845_930467904No ratings yet
- XmatcDocument3 pagesXmatcammayi9845_930467904No ratings yet
- Image Processing and Compression TechniquesDocument16 pagesImage Processing and Compression Techniquesammayi9845_930467904No ratings yet
- Figure 1: A Block Diagram of A Basic FilterDocument10 pagesFigure 1: A Block Diagram of A Basic Filterammayi9845_930467904No ratings yet
- LlcompDocument2 pagesLlcompammayi9845_930467904No ratings yet
- 5GDocument20 pages5GshubhiNo ratings yet
- Fundamentals of Cyber Law 2021 t6hzxpREDocument97 pagesFundamentals of Cyber Law 2021 t6hzxpREshivraj satavNo ratings yet
- Ridgewood Community School - WinterSpring 2017Document48 pagesRidgewood Community School - WinterSpring 2017ShellyStantonNo ratings yet
- BS 3921-1985 Specification For Clay Bricks PDFDocument31 pagesBS 3921-1985 Specification For Clay Bricks PDFLici001100% (4)
- Introduction of Kissan Credit Card SchemeDocument4 pagesIntroduction of Kissan Credit Card SchemeRomen BuragohainNo ratings yet
- STIPULATION To Stay ProceedingsDocument7 pagesSTIPULATION To Stay Proceedingsjamesosborne77-1No ratings yet
- Wooden DiffusersDocument4 pagesWooden DiffusersBRGRNo ratings yet
- Assignment Two: Dennis Wanyoike DIT-035-0022/2009 2/7/2010Document8 pagesAssignment Two: Dennis Wanyoike DIT-035-0022/2009 2/7/2010Dennis WanyoikeNo ratings yet
- Session 6 OligopolyDocument43 pagesSession 6 OligopolyROKGame 1234No ratings yet
- Jan Lokpal Bill Lok Sabha Rajya SabhaDocument4 pagesJan Lokpal Bill Lok Sabha Rajya SabhasushkanwarNo ratings yet
- BSBDIV501 Assignment Activity: This Study Resource WasDocument6 pagesBSBDIV501 Assignment Activity: This Study Resource WasRajeev AdhikariNo ratings yet
- EmployersDocument4 pagesEmployersksNo ratings yet
- Gypsum Mineral DataDocument4 pagesGypsum Mineral Datamalaya tripathy0% (1)
- BFN 111 - Week 1Document20 pagesBFN 111 - Week 1CHIDINMA ONUORAHNo ratings yet
- Resolve Error in FI Document Parking WorkflowDocument4 pagesResolve Error in FI Document Parking WorkflowManohar G ShankarNo ratings yet
- Communication Barriers - Effects On Employees EfficiencyDocument27 pagesCommunication Barriers - Effects On Employees Efficiencyvanquish lassNo ratings yet
- CBR A Drug DevelopDocument2 pagesCBR A Drug DevelopAlfieNo ratings yet
- GAD Project ProposalDocument2 pagesGAD Project ProposalMa. Danessa T. BulingitNo ratings yet
- Program of Works Fire Olympics 2023 (Version 2)Document4 pagesProgram of Works Fire Olympics 2023 (Version 2)OLP-Libmanan Fire StationNo ratings yet
- CoaseDocument20 pagesCoasepwalker_25100% (1)
- Rapid AbgDocument11 pagesRapid AbgDeoMikhailAngeloNuñezNo ratings yet
- 9) - Stategy Formulation at Corporate LevelDocument34 pages9) - Stategy Formulation at Corporate Leveldulshan jeewanthaNo ratings yet
- Police Personnel Management and RecordsDocument26 pagesPolice Personnel Management and RecordsLowie Jay Mier OrilloNo ratings yet
- Inorganic Growth Strategies: Mergers, Acquisitions, RestructuringDocument15 pagesInorganic Growth Strategies: Mergers, Acquisitions, RestructuringHenil DudhiaNo ratings yet
- Marquez Vs Comelec GR 112889Document1 pageMarquez Vs Comelec GR 112889JFA100% (1)
- Differential RAID: Rethinking RAID For SSD ReliabilityDocument5 pagesDifferential RAID: Rethinking RAID For SSD ReliabilityRabiul SikderNo ratings yet
- Cherry Mx1A-Lxxa/B: Housing Colour: KeymoduleDocument5 pagesCherry Mx1A-Lxxa/B: Housing Colour: KeymoduleArtur MartinsNo ratings yet
- Item 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACDocument6 pagesItem 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACanghelo marquezNo ratings yet
- OM-Module-5 (PM)Document25 pagesOM-Module-5 (PM)Absar SiddiquiNo ratings yet
- 341 Examples of Addressing ModesDocument8 pages341 Examples of Addressing ModesdurvasikiranNo ratings yet
- Obi-Case Study v3Document19 pagesObi-Case Study v3shilpaNo ratings yet