Basic Overview of Foxboro IA series DCS system: Stations are the key active component which will communicate
with each other to perform the assigned activities. Many stations associated to a particular process plant or train 1 is linked by Bus call Node bus, they configured in the system definition and dynamically connected. The system will monitor the availability for the stations and its peripherals or related components with periodic bus test. Two fault redundant node buses ! B are available for all nodes. "n an " series, a node consists of following group of stations related to particular plant re#uired for safe and reliable distributed control system.
1. Work Station Processor $%&' (M" for &rocess ! Maintenance team. ). Application Processor $ &' which is having the node hardware configuration ! application. Mostly act as host to system monitor and back up all stations configure in it in case of reboot or failure. *. Control process CP xx! which is the main " controller performing the process logic ! memory program as configured for the customer re#uirement. +. Fiel" B#s $o"#le: The module which linked to the field measuring device to the ,ontrol &rocess through the redundant -ield bus.
-BM 1, + are associated with standard +.)/ ma "nput 0outputs -BM 1, +/, +1 are with digital input ! outputs. -o2boro provides wide range of -BM to meet the various types of process variables .
3. Comm#nication Processor CO$$P! which is used to connect the &rinters, Modems and 4T 1// terminal for report, alarm and diagnostic. 5. %ateway & Inte'rator %W an" DI! : The interface module to read and write data to the other system like &6,, Metering, Tank gauging system etc., 1. Personnel Workstation PW! ,heap (M" work station will limit features earlier to %&. M"7. Module "dentification 7evice (etter B#'' is a essential device for every -o2boro module and Station since entire software configuration recogni8e the device by their assigned verification through this M , address technology. The above components are essential for a single plant or unit ,ontrol. "n a &rocess plant with many unit, more nodes in a plant are segregated and designed well for safe integrity and high system reliability. The Node data from one section to other section can inter linked by 6 N called ,arrier Band 6 N $,B6 N'. %ith a ,B6 N, all the Nodes in a comple2 all inter linked and configured for dynamic data e2change and control. ,B6 N speed is 3 MBS $Mega bits0sec'. ,B6 N communication always limited to 3 MBS. Types of Buses used for 7ata transfer9 Node B:S, -ield Bus and ,ell bus
�Fiel" B#s is used for -BMS to measure the direct process input 0outputs. t a speed of )*+,- k./&sec in the 1// series legacy version with ;. modules. t a speed of ) MBS $mega bits 0sec' in case of the )// series -BM with < adaptors ! with ,&5/. 0o"e b#s is used for stations communication with in a node. Bus ! B are always redundant and once enabled, ! B will shift every 13 minutes so that Bus integrity is always active and reliable. Speed with 1/ MBS $megabits0sec' between ,& to cp or cp to &, %& or %, 7", ,M& in case of legacy model station like ,&1/, )/, */, %&, &, =%*/, ,M&1/ etc. (atest "evelopments: Node bus speed increased from 1/ mbs to 1// mbs with high speed >thernet switch directly configured to the Node Bus via a N,N" module. -BM to -,M at )MBS, -,M to ,&5/ at 1/mbs. Node e2tended at 1// mbs via a fiber optic and fast >thernet switch elimination the ,B 6 N. ,ell buses are power bus for the each rack modules. 6imitation9 ,&*/ can have ma2imum of 5+ -BM. ,&5/ can have 1)/ -BM. ?ne Node can have ma2imum of 5+ Stations. ,B6 N can have ma2imum of 1// Nodes. ,arrier Band 6 N "nterface is connected by ,opper and -iber. ,opper for with in the same Marshalling room and -iber for long distance. -iber 6ink advantage9 S&>>7, 7istance and >lectromagnetic disturbance free.
Comm#nication Protocol:
Foxboro #ses I111 +2),3 spec for comm#nication at layer ), (ayer ) links two "evices by network interface car" #sin' $e"ia Access Control $AC! a""ress for every sin'le "evice associate" to it, Node Bus using the (:B philosophy with 5+ stations with 6ayer .) ,SM 0,7 ! ">>> @/)*.* protocol.
Platform #se" :
1. :ni2 A Sun micro Solaris for legacy models are known for his stability. ). %indows A NT0B& Microsoft based for market competition.
CP types an" its properties :
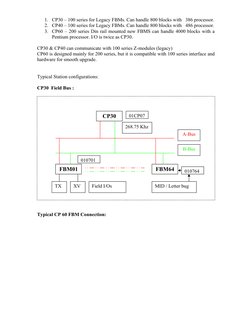
�1. ,&*/ A 1// series for 6egacy -BMs. ,an handle @// blocks with *@5 processor. ). ,&+/ A 1// series for 6egacy -BMs. ,an handle @// blocks with +@5 processor. *. ,&5/ A )// series 7in rail mounted new -BMS can handle +/// blocks with a &entium processor. "0? is twice as ,&*/. ,&*/ ! ,&+/ can communicate with 1// series ;.modules $legacy' ,&5/ is designed mainly for )// series, but it is compatible with 1// series interface and hardware for smooth upgrade. Typical Station configurations9 CP32 Fiel" B#s :
CP32
/1,&/1 )5@.13 Ch8 .Bus [Link]
/1/1/1
FB$25
TB B4 -ield "0?s
FB$*6
/1/15+
M"7 0 6etter bug
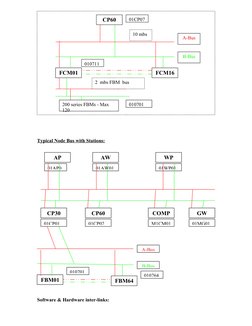
4ypical CP *2 FB$ Connection:
�CP*2
/1,&/1 1/ mbs
.Bus
[Link] /1/111
FC$25
) mbs -BM bus
FC$5*
)// series -BMs . Ma2 1)/
/1/1/1
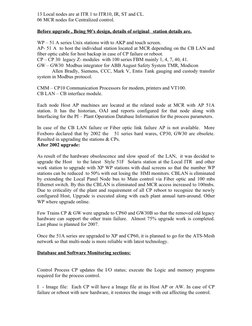
4ypical 0o"e B#s wit7 Stations:
AP
/1 &/
AW
/1 %/1
WP
/1%&/1
CP32
/1,&/1
CP*2
/1,&/)
CO$P
M1,M/1
%W
/1M=/1
.Bus [Link] /1/1/1
FB$25
Software 8 .ar"ware inter9links:
FB$*6
/1/15+
�node design is critical for the data follow and its station recognition. To protect their (ardware and Software, -o2boro first design the node and prepare a system definition by defining the associated the stations like %&, &, %, &%, ,M&, ,&, =% re#uired for the particular plant or section so that re#uired process condition and operator interface. -or higher reliability, critical stations like ,&, =% are configures as redundant or fault tolerant so the single bus or single module failure do not affect the system control or plant operation. ?nce the system definition is done, the committal software creates a &roprietary committal diskette and need to be installed in all station in order form the above node. ?nce the node is established, all the stations can e2change data and customi8ed other graphic and hardware configuration, dynamic values can be configured by the system >ngineers. committed station will have a System Manager 7isplay (andler $SM7(' which will display all the node or [Link] details. Station Manger A SM7( is vital for the -o2boro and customer software engineer for regular system monitoring, diagnostics, investigation and for enabling or disabling station for maintenance. Station "7 in %hite color indicates both the module is healthy ! online. Station "7 in <ellow color indicates one module or one sub.device0 bus is faulty. Station "7 in Ded color indicates both modules are not [Link] or defective. ,B6 N overview9 ?nce an active node mainly located in the local control room is ready, it can connected to the another node at the other location or to the centrali8ed Main control room through a ,B 6 N interface module called ,B 6 N module so that a [Link] access is achieved for 7istributed control strategy. "f the distance between the local control rooms and Main control rooms are longer, -iber optic link are established between the ,B 6 N and -iber optic converter so that a standard 3 mbs ,B6 N can be successfully established irrespective for the node distances. :e"#n"ant $o"#le an" CB (A0 a"vanta'e: 1. Since the modules are redundant with dual bus, one bus failure or one module failure due to hardware or software will not affect the plant process operation. ). "f the ,B 6 N interface module or fiber0copper link fails ; only t7e ot7er no"e or main control room "ata transfer will be affect b#t t7e CP lo'ic 8 memory pro'rams will be r#nnin' normally ens#rin' contin#o#s control system availability, <atar'as 0o"e an" .ar"ware types: E= -o2boro system with 1F nodes was installed during 1FF3 by ,hiyoda and Toyo.
�1* 6ocal nodes are at "TD 1 to "TD1/, "D, ST and ,6. /5 M,D nodes for ,entrali8ed control. Before #p'ra"e ; Bein' =2>s "esi'n; "etails of ori'inal station "etails are, %& A 31 series :ni2 stations with to C& and touch screen. &. 31 to host the individual station located at M,D depending on the ,B 6 N and fiber optic cable for host backup in case of ,& failure or reboot. ,& A ,& */ legacy ;. modules with 1// series -BM mainly 1, +, 1, +/, +1. =% A =%*/ Modbus integrator for BB ugust Safety System TMD, Modicon llen Bradly, Siemens, ,,,, Mark 4, >ntis Tank gauging and custody transfer system in Modbus protocol. ,MM A ,&1/ ,ommunication &rocessors for modem, printers and 4T1//. ,B 6 N A ,B interface module. >ach node (ost & machines are located at the related node at M,D with & 31 station. "t has the historian, ? G and reports configured for that node along with "nterfacing for the &" A &lant ?peration 7atabase "nformation for the process parameters. "n case of the ,B 6 N failure or -iber optic link failure & is not available. More -o2boro declared that by )//) the 31 series hard wares, ,&*/, =%*/ are obsolete. Desulted in upgrading the stations ! ,&s. After )22) #p'ra"e: s result of the hardware obsolescence and slow speed of the 6 N, it was decided to upgrade the (ost to the latest Style 31- Solaris station at the 6ocal "TD and other work station to upgrade with B& %& stations with dual screens so that the number %& stations can be reduced to 3/H with out losing the (M" monitors. ,B6 N is eliminated by e2tending the 6ocal &anel Node bus to Main control via -iber optic and 1// mbs >thernet switch. By this the ,B6 N is eliminated and M,D access increased to 1//mbs. 7ue to criticality of the plant and re#uirement of all ,& reboot to recogni8e the newly configured (ost, :pgrade is e2ecuted along with each plant annual [Link]. ?ther %& where upgrade online. -ew Trains ,& ! =% were upgrade to ,&5/ and =%*/B so that the removed old legacy hardware can support the other train failure. lmost 13H upgrade work is completed. 6ast phase is planned for )//1. ?nce the 31 series are upgraded to B& and ,&5/, it is planned to go for the network so that [Link] is more reliable with latest technology. Database an" Software $onitorin' sections: ,ontrol &rocess ,& updates the "0? statusI e2ecute the 6ogic and memory programs re#uired for the process control. " . "mage file9 >ach ,& will have a "mage file at its (ost & or %. "n case of ,& failure or reboot with new hardware, it restores the image with out affecting the control. [Link]
�.$I9software : The (M" have =raphic representation of process with static and dynamic parts. :ni2 based 7isplay Manager for style 31 series and %indows based -o2view software are common. The 7ynamic parts of the =raphics are linked with ,onfigured ,& Block parameter and update the valve instantly along with the associated logics. ICC9 Confi'#rator: "ntegrated ,ontrol ,onfig Tool based on the :ni2 are used by System >ngineers to define and create the station, compounds, blocks and parameters. "0? are configured with uni#ue format called ,9 B.&. The compound must be uni#ue for the entire ,B6 N stations so that the data from compound are uni#ue and shared by all stations. ,"? is used for "0? configuration, 6ogic and Se#uential calculations ! e2ecution. %rap7ics: 7isplay Builder and 7isplay configurator help to develop in :N"B station for the graphic configurations. -o2 draw in ver 1.1 solaris and B& stations are latest development for station and dynamic graphic development. 1nvironment Control : >nvironment software assign and restrict the difference users privilege and access level of the various =raphic and block functionality. $ -ield over only view mode, ,ontrol room to access controllers, " blocks, , 7 page access and limited authority to view the J",, blocksK. Supervisor will have more privilege like larm clear or delete, Maintenance ?verride access and system alarm acknowledgments. Technicians and >ngineers will have higher level to override the block, simulate and trouble shoot the system . CAD : ,urrent larm display is the 4ital tool to display process cum system alarm and alert the &anel operator for immediate corrective action with in the controlled limit. S$D. : System related alarms and alerts, Station status, enable or disable of a station can be done though this software. "T can accessed only at >ngineers environment. .istorian : larm (istorian &ackage $ (stma or imL' allows the engineers to configure block parameter data archive for standard period like 13 days or */s for case study, trending and operator action Gournal recording. Deport =eneration 9 "t is another software package to configure a customi8ed set of process parameter values and calculation like daily product report, shift end report etc. <% DCS ta''in' an" c#stom file i"enfication : Compo#n" parameter C:B,P! TD)M/)-=SM/1 9 @= TD1M/1&,SM/19 /1T"1/1, /1&T/), /1T (/1,/1-T/1N. -?D Train TD1 TT,-T etc. -or Train TD1 -!= inputs
(*11)/S, @= ((*111/,
TD1M/1>S7M/)91S7<1/1,1B<1/1, 1TT)/) for Train TD1 >S7 "0?. TD1M/1&SSM/19 1T 1/1,1& 1/1 -rom the &SS gateway /1M=/1. Software: ll the customi8ed =raphics and other , 7 files are saved in 0usr0folders with uni#ue directory and numbers based on the unit and tagging philosophy.
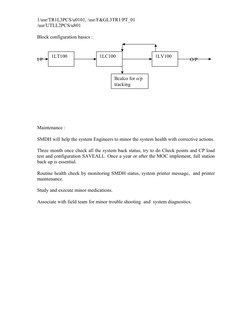
�10usr0TD16*&,S0u/1/1, 0usr0-!=6*TD10&TM/1 0usr0:T66)&,S0u@/1 Block configuration basics 9
"0&
16T1//
16,1//
1641//
?0&
Bcalco for o0p tracking
Maintenance 9 SM7( will help the system >ngineers to minor the system health with corrective actions. Three month once check all the system back status, try to do ,heck points and ,& load test and configuration S 4> 66. ?nce a year or after the M?, implement, full station back up is essential. Doutine health check by monitoring SM7( status, system printer message, and printer maintenance. Study and e2ecute minor medications. ssociate with field team for minor trouble shooting and system diagnostics.