You might also like
- Reg Foto IPIP K1 POSTEDocument5 pagesReg Foto IPIP K1 POSTEBayron Leandro Rosero HuertasNo ratings yet
- Informe Homologación Herrajes Multifibra Herrajes Moldes SAS 072020Document30 pagesInforme Homologación Herrajes Multifibra Herrajes Moldes SAS 072020Bayron Leandro Rosero HuertasNo ratings yet
- Cables ADSS 69186##2Document2 pagesCables ADSS 69186##2Bayron Leandro Rosero HuertasNo ratings yet
- Cables ADSS 69186##1Document2 pagesCables ADSS 69186##1Bayron Leandro Rosero HuertasNo ratings yet
- Cables ADSS 69186##1Document2 pagesCables ADSS 69186##1Bayron Leandro Rosero HuertasNo ratings yet
- Reg Foto IPIP D8 CAJAS OkDocument5 pagesReg Foto IPIP D8 CAJAS OkBayron Leandro Rosero HuertasNo ratings yet
- Reg Foto IPIP B2 CAMARASDocument5 pagesReg Foto IPIP B2 CAMARASBayron Leandro Rosero HuertasNo ratings yet
- Cables ADSS 69186##1Document2 pagesCables ADSS 69186##1Bayron Leandro Rosero HuertasNo ratings yet
- Informe Homologación Herrajes Multifibra Herrajes Moldes SAS 072020Document30 pagesInforme Homologación Herrajes Multifibra Herrajes Moldes SAS 072020Bayron Leandro Rosero HuertasNo ratings yet
- Uvhyvc 9Document2 pagesUvhyvc 9Bayron Leandro Rosero HuertasNo ratings yet
- Cables ADSS 69186##1Document2 pagesCables ADSS 69186##1Bayron Leandro Rosero HuertasNo ratings yet
- Transmisores y Rceptores Opticos 2021Document5 pagesTransmisores y Rceptores Opticos 2021JosuaNo ratings yet
- Cables ADSS 69186##1Document2 pagesCables ADSS 69186##1Bayron Leandro Rosero HuertasNo ratings yet
- Uvhyvc 9Document2 pagesUvhyvc 9Bayron Leandro Rosero HuertasNo ratings yet
- Ejercicios de Vectores, Mru, MruaDocument13 pagesEjercicios de Vectores, Mru, MruaBayron Leandro Rosero Huertas100% (1)
- Uk6w7kh PDFDocument1 pageUk6w7kh PDFJuan Sthiven OrtizNo ratings yet
- Ensayo Actividad 6Document5 pagesEnsayo Actividad 6Bayron Leandro Rosero HuertasNo ratings yet
- Estudio de Caso Hector Gaming CompanyDocument2 pagesEstudio de Caso Hector Gaming CompanyBayron Leandro Rosero HuertasNo ratings yet
- Trabajos en AlturaDocument22 pagesTrabajos en Alturarigoguga9479No ratings yet
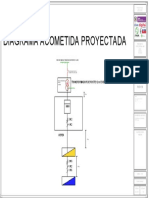
- 10.diagrama Acometida IpialesDocument1 page10.diagrama Acometida IpialesBayron Leandro Rosero HuertasNo ratings yet
- Departamento Nacional de PlaneaciónDocument3 pagesDepartamento Nacional de PlaneaciónBayron Leandro Rosero HuertasNo ratings yet
- Informe de SelecciónDocument2 pagesInforme de SelecciónBayron Leandro Rosero Huertas100% (1)
- Departamento Nacional de PlaneaciónDocument3 pagesDepartamento Nacional de PlaneaciónBayron Leandro Rosero HuertasNo ratings yet
- Insuficiencia CardiacaDocument46 pagesInsuficiencia CardiacaBayron Leandro Rosero HuertasNo ratings yet
- EscalerasDocument13 pagesEscalerascasasnativaNo ratings yet
- Qué Es Un EsguinceDocument18 pagesQué Es Un EsguinceBayron Leandro Rosero HuertasNo ratings yet
- EscaleraDocument11 pagesEscalera3138541950No ratings yet
- EscalerasDocument13 pagesEscalerascasasnativaNo ratings yet
- EscaleraDocument11 pagesEscalera3138541950No ratings yet
- Pasos para Instalacion Plataforma Live MeetingDocument3 pagesPasos para Instalacion Plataforma Live MeetingJorge ArancibiaNo ratings yet
- La RoboticaDocument12 pagesLa RoboticaJessica Perez rivasNo ratings yet
- Inteligencia Artificial PDFDocument5 pagesInteligencia Artificial PDFreiNo ratings yet
- Previsión Del Impacto de La Automatización y de Las Tecnologías de La Cuarta Revolución Industrial 4riDocument120 pagesPrevisión Del Impacto de La Automatización y de Las Tecnologías de La Cuarta Revolución Industrial 4riAlexander LopezNo ratings yet
- 2012 - Enem UP - Matemática e Linguagens - 17-06 - GabaritadoDocument44 pages2012 - Enem UP - Matemática e Linguagens - 17-06 - GabaritadoJosé AndersonNo ratings yet
- Evidencia de Aprendizaje 1 INT ART SEM 1Document10 pagesEvidencia de Aprendizaje 1 INT ART SEM 1sede la esmeraldaNo ratings yet
- 04 Henry Luna - INGEMMETDocument60 pages04 Henry Luna - INGEMMETalan arcaNo ratings yet
- Desafíos Jurídicos en Entornos Digitales, Inteligencia Artificial y LegaltechDocument8 pagesDesafíos Jurídicos en Entornos Digitales, Inteligencia Artificial y LegaltechFrank MakalisterNo ratings yet
- Machine LearningDocument7 pagesMachine Learningjaime salcedoNo ratings yet
- GenieDocument11 pagesGenieluisdc2967No ratings yet
- Evolución de Los Sistemas de InformaciónDocument9 pagesEvolución de Los Sistemas de InformaciónEmanuel Valdivia BenaventeNo ratings yet
- Aprende Machine LearningDocument194 pagesAprende Machine Learningalfonso75% (8)
- Pobreza Extrema en MéxicoDocument241 pagesPobreza Extrema en MéxicojgastNo ratings yet
- UntitledDocument1,058 pagesUntitledNicolas PinochetNo ratings yet
- Las Leyes de La RoboticaDocument3 pagesLas Leyes de La Roboticaboricua_calenaNo ratings yet
- GROVE 2da ParteDocument52 pagesGROVE 2da ParteLeos Valencia100% (8)
- Teología de La Vocación PDFDocument30 pagesTeología de La Vocación PDFEEPINo ratings yet
- Escala de Clima Social de La FamiliaDocument13 pagesEscala de Clima Social de La FamiliaKeptah Caldea100% (8)
- Enlcd 2017-2021 PDFDocument115 pagesEnlcd 2017-2021 PDFJoosep Ruben Verde CéspedesNo ratings yet
- El Inminente Futuro de La Terapia Cognitiva ConductualDocument4 pagesEl Inminente Futuro de La Terapia Cognitiva ConductualFernando HuguesNo ratings yet
- Uruguay y El Gobierno ElectrónicoDocument3 pagesUruguay y El Gobierno ElectrónicoLiluKatz2013No ratings yet
- Innovaciones en La AgriculturaDocument1 pageInnovaciones en La AgriculturaLaura MardonesNo ratings yet
- Tema 8: Redes Neuronales: Pedro Larra Naga, I Naki Inza, Abdelmalik MoujahidDocument48 pagesTema 8: Redes Neuronales: Pedro Larra Naga, I Naki Inza, Abdelmalik MoujahidErRobert ChNo ratings yet
- Araucaria 44 Monografia 2Document216 pagesAraucaria 44 Monografia 2Amatista NemesisobsidianNo ratings yet
- J. L. Austin - Como Hacer Cosas Con PalabrasDocument108 pagesJ. L. Austin - Como Hacer Cosas Con PalabrasLuiz Fernando Priamo Mirabel100% (39)
- Asi Se Hace Un Collage 2 ParteDocument51 pagesAsi Se Hace Un Collage 2 ParteFmhajaha Simabak100% (6)
- Programacion Mayo Cinemateca BDocument8 pagesProgramacion Mayo Cinemateca Bmiau lemiNo ratings yet
- Tesis de Maestria - MagnoEdwinCalizaya Version 07Document127 pagesTesis de Maestria - MagnoEdwinCalizaya Version 07Eivy PereyraNo ratings yet
- DESNOES, Edmundo La Imagen Fotografica Del SubdesarrolloPDFDocument19 pagesDESNOES, Edmundo La Imagen Fotografica Del SubdesarrolloPDFSandra Loewe0% (2)
- La Quimica Del AmorDocument11 pagesLa Quimica Del AmorJeisson Beltrán100% (1)
- Gir 2019Document92 pagesGir 2019mbertelNo ratings yet