You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Time Overcurrent Relays: More or Less Approximates Thermal FuseDocument9 pagesTime Overcurrent Relays: More or Less Approximates Thermal FusethavaselvanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- 00123-Drawing Creation PLS-CADD PDFDocument8 pages00123-Drawing Creation PLS-CADD PDFtanujaayerNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Fault AnalysisDocument37 pagesFault Analysisavinash_sinha20100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Unsymmetrical Fault Analysis 1Document27 pagesUnsymmetrical Fault Analysis 1thavaselvanNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- DSP-Based Speed Adaptive Flux Observer of Induction MotorDocument5 pagesDSP-Based Speed Adaptive Flux Observer of Induction MotorthavaselvanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 1 1 I I Exp ( ) : Qe T T kAT TDocument1 page1 1 I I Exp ( ) : Qe T T kAT TthavaselvanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Newton-Raphson Power-Flow Analysis Including Induction Motor LoadsDocument6 pagesNewton-Raphson Power-Flow Analysis Including Induction Motor LoadsthavaselvanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- PG Diploma - Industrial and Company LawDocument1 pagePG Diploma - Industrial and Company LawthavaselvanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Intelligrid R&D Roadmap: Don Von Dollen Senior Program Manager, Data Integration & CommunicationsDocument29 pagesIntelligrid R&D Roadmap: Don Von Dollen Senior Program Manager, Data Integration & CommunicationsthavaselvanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- New Doc 2Document15 pagesNew Doc 2thavaselvanNo ratings yet
- Structural Report BMU 13 Revere Place Brooklyn.Document10 pagesStructural Report BMU 13 Revere Place Brooklyn.Laura MajjulNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- SM Notes 1 by Civildatas - Blogspot.inDocument154 pagesSM Notes 1 by Civildatas - Blogspot.inutsav_koshtiNo ratings yet
- Dimensiones Pernos de Anclaje PEIKKO.Document6 pagesDimensiones Pernos de Anclaje PEIKKO.j-balderasNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Effects of Partial Replacement of Cement With Marble Dust Powder On Properties of ConcreteDocument5 pagesEffects of Partial Replacement of Cement With Marble Dust Powder On Properties of ConcreteIJIRSTNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
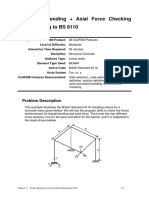
- Biaxial Bending + Axial Force Checking According To BS 8110Document39 pagesBiaxial Bending + Axial Force Checking According To BS 8110HectoreRodriguezlNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Introduction To Chiral Perturbation TheoryDocument27 pagesIntroduction To Chiral Perturbation TheoryTialocNo ratings yet
- SEM 1 MCA 11 MathematicsDocument379 pagesSEM 1 MCA 11 MathematicsMalatesh HavanagiNo ratings yet
- Mathematical ModelsDocument8 pagesMathematical ModelsSteve manicsicNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- APS March Meeting 2017Document116 pagesAPS March Meeting 2017mkromelNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Tolerance Accumulation and Analysis (GD&T)Document80 pagesTolerance Accumulation and Analysis (GD&T)Kishor kumar Bhatia50% (4)
- OSA-06-Vibration Fatigue Analysis of Sheet Metal Mahindra2wheelerDocument11 pagesOSA-06-Vibration Fatigue Analysis of Sheet Metal Mahindra2wheelerikramishereNo ratings yet
- Cell Biology Cell Structures and Their FunctionsDocument30 pagesCell Biology Cell Structures and Their FunctionsMing Shahir SalehNo ratings yet
- Lightings Columns Design and VerificationDocument32 pagesLightings Columns Design and VerificationAlejandro Guardia Carrasco0% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Systematics of The Spinel Structure TypeDocument23 pagesSystematics of The Spinel Structure TypeAlin DrucNo ratings yet
- MercerizationDocument2 pagesMercerizationLohit MohapatraNo ratings yet
- Group 2 4620 Group ReportDocument15 pagesGroup 2 4620 Group ReportAtitat Rattanachata100% (1)
- Omae2009 79047Document6 pagesOmae2009 79047Mehdi Ghoddosi100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Scientific Attitudes and ValuesDocument12 pagesScientific Attitudes and ValuesSadik Khan83% (6)
- Mark Scheme (Results) January 2007: GCE Mathematics Core Mathematics C3 (6665)Document7 pagesMark Scheme (Results) January 2007: GCE Mathematics Core Mathematics C3 (6665)Fahema ShafiNo ratings yet
- Funteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityDocument2 pagesFunteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityLorna HerillaNo ratings yet
- Mech 3650Document2 pagesMech 3650Wegdan AldobaiNo ratings yet
- Nmat Physics Simulations (Mock 2) DIRECTIONS: Select The Best Answer To Each of TheDocument4 pagesNmat Physics Simulations (Mock 2) DIRECTIONS: Select The Best Answer To Each of TheCin 0322No ratings yet
- Report On Dimensional Tolerance: DefinationDocument10 pagesReport On Dimensional Tolerance: DefinationPiyush BariNo ratings yet
- Institute of Space TechnologyDocument17 pagesInstitute of Space TechnologyAhsan RafiqNo ratings yet
- 4.1 Gravity Force LabDocument4 pages4.1 Gravity Force LabT. Danielle Dockery100% (1)
- Seismic PetrophysicsDocument17 pagesSeismic PetrophysicsShahid Ur RehmanNo ratings yet
- Sepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603Document114 pagesSepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603makarandmone100% (9)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1889 Edison and His InventionsDocument288 pages1889 Edison and His Inventionsdeguara100% (4)
- Manual Del Radar - Simulador PDFDocument72 pagesManual Del Radar - Simulador PDFcarlosNo ratings yet
- Science For Kids Workbook Essential Oil EditionDocument58 pagesScience For Kids Workbook Essential Oil EditionEscambo Sitedobem100% (2)