You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Info Lantime m300Document5 pagesInfo Lantime m300Kenneth YanulaqueNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Sverker 750/760 User's ManualDocument76 pagesSverker 750/760 User's ManualBurak Yanar100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Sandeep Maram THESIS Final UpdatedFebDocument81 pagesSandeep Maram THESIS Final UpdatedFebKenneth YanulaqueNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Sverker 750/760 User's ManualDocument76 pagesSverker 750/760 User's ManualBurak Yanar100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Ametek Power Instruments Sc-JemstarDocument193 pagesAmetek Power Instruments Sc-JemstarKenneth YanulaqueNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Costossynchrophasor Technologies Deployment Arra2009Document17 pagesCostossynchrophasor Technologies Deployment Arra2009Kenneth YanulaqueNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Set 2Document4 pagesSet 2Kenneth YanulaqueNo ratings yet
- TRANSMISSSION SYSTEM AND GENERATOR Power System Stabilizer PDFDocument8 pagesTRANSMISSSION SYSTEM AND GENERATOR Power System Stabilizer PDFRamakrishnaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 7SA511 Numeriacl Distance Protection RelayDocument326 pages7SA511 Numeriacl Distance Protection RelayMiguel AngelNo ratings yet
- MCGG Manual Relay PDFDocument20 pagesMCGG Manual Relay PDFBagus Permadi100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- 7SA511 CatalogueDocument4 pages7SA511 CatalogueKenneth YanulaqueNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- WampacDocument64 pagesWampacKenneth YanulaqueNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 7vk512 ManualDocument132 pages7vk512 ManualKenneth YanulaqueNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- LCD TV: Service ManualDocument43 pagesLCD TV: Service Manualmariana acostaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Effect of Dzyaloshinskii-Moriya Interaction On Magnetic Vortex Switching Driven by Radial Spin WavesDocument5 pagesEffect of Dzyaloshinskii-Moriya Interaction On Magnetic Vortex Switching Driven by Radial Spin WavesVishesh TikuNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Camera InstallationChecklistDocument2 pagesCamera InstallationChecklistsyed nadeemNo ratings yet
- Analog Fastspice Platform: Digital Industries SoftwareDocument3 pagesAnalog Fastspice Platform: Digital Industries Software성호성No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Ingecon Sun Con20 Con40 Outdoor InvertersDocument8 pagesIngecon Sun Con20 Con40 Outdoor InvertersosamaNo ratings yet
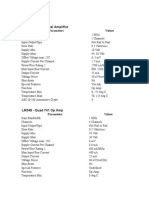
- Op Amp ParametersDocument3 pagesOp Amp Parametersscribd2muthuNo ratings yet
- F Series Handpunch Modem: Installation InstructionsDocument8 pagesF Series Handpunch Modem: Installation Instructionsmartin_jaitmanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- CCTV and Acs Single Line DiagramDocument2 pagesCCTV and Acs Single Line DiagramCode JonNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EEE BUET UG Routine July23Document40 pagesEEE BUET UG Routine July23M.H.S. SaikotNo ratings yet
- Power Cable LIOADocument28 pagesPower Cable LIOAHùng NguyễnNo ratings yet
- The Fatal CurrentDocument2 pagesThe Fatal CurrentSherif MahmoudNo ratings yet
- Upgrade Electrical Systems at Abqaiq Plants: Plan Elevation and General Arrangement Drawing For 111-091-MCC-003Document6 pagesUpgrade Electrical Systems at Abqaiq Plants: Plan Elevation and General Arrangement Drawing For 111-091-MCC-003Asad MaherNo ratings yet
- Piezon Master EAS PM700 Service ManualDocument28 pagesPiezon Master EAS PM700 Service ManualcckmNo ratings yet
- Easy Understanding of 3-Phase Transformer Connections (Delta-Delta, Wye-Wye, Delta-Wye and Wye-Delta) - EEPDocument14 pagesEasy Understanding of 3-Phase Transformer Connections (Delta-Delta, Wye-Wye, Delta-Wye and Wye-Delta) - EEProbert_rjc100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- RtacDocument1 pageRtackibweantNo ratings yet
- 49233-EN DM1000 Data Sheet PDFDocument4 pages49233-EN DM1000 Data Sheet PDFLaraNo ratings yet
- SBMS User ManualDocument43 pagesSBMS User ManualChad AttermannNo ratings yet
- Um3103 Stm32wba Nucleo64 Board mb1863 StmicroelectronicsDocument40 pagesUm3103 Stm32wba Nucleo64 Board mb1863 StmicroelectronicsslimslimkhmissiNo ratings yet
- DC Bus Voltage RegulationDocument2 pagesDC Bus Voltage RegulationHasRasfaNo ratings yet
- SNUG Austin 2012 Paper51 PresentationDocument21 pagesSNUG Austin 2012 Paper51 PresentationvjemmanNo ratings yet
- Bahir Dar UniversityDocument47 pagesBahir Dar UniversityAdisu ZiNo ratings yet
- VAMP 125: Unit For Flexible Arc Flash ProtectionDocument12 pagesVAMP 125: Unit For Flexible Arc Flash Protectionuday chaurasiaNo ratings yet
- Cal Check CycleDocument4 pagesCal Check Cyclezhen yongjieNo ratings yet
- Analog Electronics Lab ManualDocument49 pagesAnalog Electronics Lab ManualReddyvari VenugopalNo ratings yet
- Electrical DetailsDocument4 pagesElectrical Detailsdppl.mepNo ratings yet
- Engine Control Unit MS 62 Datasheet 51 en 15586334859pdfDocument4 pagesEngine Control Unit MS 62 Datasheet 51 en 15586334859pdfshinichieNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ADC of PIC MicrocontrollerDocument4 pagesADC of PIC Microcontrollerkillbill100% (2)
- AbstractDocument4 pagesAbstractMohamed IbrahemNo ratings yet
- VG2043 Ds EngDocument0 pagesVG2043 Ds Engppanagos5664No ratings yet