Professional Documents
Culture Documents
Optimizacion No Lineal1
Uploaded by
Jim ValerioCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Optimizacion No Lineal1
Uploaded by
Jim ValerioCopyright:
Available Formats
1
PROGRAMACION NO LINEAL
La Programacin no Lineal (PNL) es una parte de la Investigacin Operativa cuya misin es proporcionar una serie
de resultados y tcnicas tendentes a la determinacin de puntos ptimos para una funcin (funcin objetivo) en un
determinado conjunto (conjunto de oportunidades), donde tanto la funcin objetivo, como las que intervienen en las
restricciones que determinan el conjunto de oportunidades pueden ser no lineales. Evidentemente, la estructura del
problema puede ser muy variada, segn las funciones que en l intervengan (a diferencia de la Programacin Lineal
(PL) donde la forma especial del conjunto de oportunidades y de la funcin objetivo permite obtener resultados
generales sobre las posibles soluciones y facilitan los tratamientos algortmicos de los problemas). Ello ocasiona una
mayor dificultad en la obtencin de resultados, que se refleja tambin en la dificultad de la obtencin numrica de las
soluciones. En este sentido, hay que distinguir entre las diversas caracterizaciones de ptimo, que slo se emplean
como tcnicas de resolucin en problemas sencillos, y los mtodos numricos iterativos, cuyo funcionamiento se
basa en estas caracterizaciones, para la resolucin de problemas ms generales.
Optimizacin
En matemticas, estadsticas, ciencias empricas, ciencia de la computacin, o ciencia de la
administracin, optimizacin matemtica (o bien, optimizacin o programacin matemtica) es la seleccin del
mejor elemento (con respecto a algn criterio) de un conjunto de elementos disponibles.
En el caso ms simple, un problema de optimizacin consiste en maximizar o minimizar una funcin real eligiendo
sistemticamente valores de entrada (tomados de un conjunto permitido) y computando el valor de la funcin. La
generalizacin de la teora de la optimizacin y tcnicas para otras formulaciones comprende un rea grande de
las matemticas aplicadas. De forma general, la optimizacin incluye el descubrimiento de los "mejores valores" de
alguna funcin objetivo dado un dominio definido, incluyendo una variedad de diferentes tipos de funciones objetivo
y diferentes tipos de dominios.
Programacin no lineal
En matemticas, Programacin no lineal (PNL) es el proceso de resolucin de un sistema de igualdades y
desigualdades sujetas a un conjunto de restricciones sobre un conjunto de variables reales desconocidas, con un
funcin objetivo a maximizar (o minimizar), cuando alguna de las restricciones o la funcin objetivo no son lineales.
Un problema de programacin no lineal (PNL) general se expresa como sigue:
Encuentre los valores de decisin x
1
, x
2
, , x
n
que
Max (o Min) z = (
)( )
)( )
.
.
.
)( )
Como en la programacin lineal, (
) es la funcin objetivo del PNL, y
)( )
)( )
son las restricciones del PNL. Un PNL sin
restricciones es un PNL irrestricto.
Ejemplo bidimensional
Un problema sencillo puede definirse por las restricciones:
x
1
0
x
2
0
x
1
2
+ x
2
2
1
x
1
2
+ x
2
2
2
con una funcin objetivo a ser maximizada
f(x) = x
1
+ x
2
2
La interseccin de la lnea con el espacio de restricciones representa la solucin.
Ejemplo tridimensional
Otro problema simple se define por la restricciones:x
1
2
x
2
2
+ x
3
2
2
x
1
2
+ x
2
2
+ x
3
2
10
con una funcin objetivo a ser maximizada
f(x) = x
1
x
2
+ x
2
x
3
donde x = (x
1
, x
2
, x
3
)
La interseccin de la superficie superior con el espacio de restricciones en el centro representa la solucin
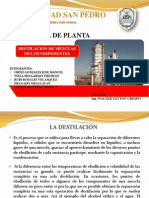
Grfico de un paraboloide dado por f(x,y) = -(x+y)+4. El mximo global en (0, 0, 4) est indicado por un punto rojo.
Conceptos Bsicos
3
EJ EMPLO 1 Intervalos sobre los cuales es creciente y decreciente
4
5
6
EJ EMPLO 2 Aplicacin del criterio de la primera derivada
7
El siguiente teorema muestra cmo utilizar la segunda derivada de una funcin para determinar intervalos sobre
los cuales la grfica de es cncava hacia arriba o hacia abajo. Una prueba de este teorema sigue directamente del
teorema 3.5 y de la definicin de concavidad.
NOTA Un tercer caso del teorema 3.7 podra ser que si f (x) = 0 para todo x en I, entonces f es lineal. Notar, sin embargo, que la
concavidad no se define para una recta. En otras palabras una recta no es ni cncava hacia arriba ni cncava hacia abajo.
EJ EMPLO 1 Determinacin de la concavidad
Determinar los intervalos abiertos en los cuales la grfica de
8
Puntos de inflexin
La grfica en la figura 3.26 tiene dos puntos en los cuales cambia la concavidad. Si la recta tangente a la grfica
existe en un punto de este tipo, ese punto es un punto de inflexin. Se muestran tres tipos de puntos de inflexin en
la figura 3.28.
DEFINICIN DE PUNTO DE INFLEXIN
Sea una funcin que es continua en un intervalo abierto y sea c un punto en ese intervalo. Si la grfica de tiene
una recta tangente en este punto (c, (c)), entonces este punto es un punto de inflexin de la grfica de si la
concavidad de cambia de cncava hacia arriba a cncava hacia abajo (o de cncava hacia abajo a cncava hacia
arriba) en ese punto.
EJ EMPLO 3 Determinacin de los puntos de inflexin
Determinar los puntos de inflexin y analizar la concavidad de la grfica de (x) = x
4
- 4x
3
.
9
Solucin La derivacin doble produce lo siguiente.
10
EJ EMPLO 4 Empleo del criterio de la segunda derivada
11
Extremos de funciones de dos variables
Hallar extremos absolutos y relativos de una funcin de dos variables.
Utilizar el criterio de las segundas derivadas parciales para hallar un extremo relativo de una funcin de dos
variables.
Extremos absolutos y extremos relativos
En el captulo 3 se estudiaron las tcnicas para hallar valores extremos de una funcin de una (sola) variable. En esta
seccin se extienden estas tcnicas a funciones de dos variables.
Por ejemplo, en el teorema 13.15 se extiende el teorema del valor extremo para una funcin de una sola variable a
una funcin de dos variables.
12
13
EJ EMPLO 1 Hallar un extremo relativo
Hallar los extremos relativos de
El criterio de las segundas derivadas parciales
14
15
EJ EMPLO 3 Aplicacin del criterio de las segundas derivadas parciales
16
EJ EMPLO 4 Cuando el criterio de las segundas derivadas parciales no es concluyente
17
EJ EMPLO 2 Beneficio mximo
Un fabricante de artculos electrnicos determina que la ganancia o beneficio P (en dlares) obtenido al producir x
unidades de un reproductor de DVD y y unidades de un grabador de DVD se aproxima mediante el modelo
Teorema: Una condicin suficiente para que un punto estacionario X
0
sea un extremo es que la matriz Hessiana H
evaluada en X
0
satisfaga las siguientes condiciones:
(i) H se define positiva si X
0
es un punto mnimo.
(ii) H se define negativa si X
0
es un punto mximo.
Considere la funcin
18
Por lo comn, si es indefinida,
debe ser un punto silla. En casos no concluyentes, X
0
puede o no ser un extremo,
y la condicin de suficiencia se hace algo complicada, porque en la expansin de Taylor se deben considerar
trminos de mayor orden.
La condicin de suficiencia establecida por el teorema anterior aplica funciones de una sola variable como sigue.
Dado que y
0
es un punto estacionario, entonces
OPTIMIZACIN NO RESTRINGIDA DE UNA VARIABLE
A continuacin se explicar cmo se pueden resolver algunos tipos de problemas como los que se acaban de
describir, comenzando por el caso ms sencillo, la optimizacin no restringida con una sola variable x (n = 1), donde
la funcin diferenciable f (x) que debe maximizarse es cncava.
En consecuencia, la condicin necesaria y suficiente para que una solucin particular x = x* sea ptima (un mximo
global) es
19
Como se ilustra en la fi gura 12.12. Si en esta ecuacin se puede despejar x* de modo directo, el problema llega a su
fi n; pero si f (x) no es una funcin sencilla y su derivada no es una funcin lineal o cuadrtica, tal vez sea imposible
resolver la ecuacin analtica. De ser as, existe una cantidad de procedimientos de bsqueda para resolver el
problema en forma numrica.
El enfoque con cualquiera de estos procedimientos de bsqueda implica encontrar una serie de ensayos de solucin
que conduzcan hacia una solucin ptima. En cada iteracin se comienza con la solucin de prueba actual para llevar
a cabo una bsqueda sistemtica, que culmina con la identificacin de una nueva solucin de prueba mejorada. El
procedimiento contina hasta que la solucin de prueba haya convergido hacia una solucin ptima, en caso de que
exista una.
A continuacin se describirn dos procedimientos de bsqueda comunes. El primero mtodo de biseccin se
escogi porque es un procedimiento intuitivo y directo. El segundo mtodo de Newton se incluy porque tiene
un papel fundamental en la programacin no lineal en general.
Mtodo de biseccin
Este procedimiento de bsqueda siempre se puede aplicar cuando f (x) es cncava de forma que la segunda
derivada sea negativa o cero para toda x como se mostr en la fi gura 12.12. Este mtodo puede usarse tambin
para algunas otras funciones. En particular, si x* denota la solucin ptima, todo lo que se necesita es que
Estas condiciones se cumplen de manera automtica si f (x) es cncava, pero tambin se pueden cumplir cuando la
segunda derivada es positiva para algunos (pero no todos) los valores de x.
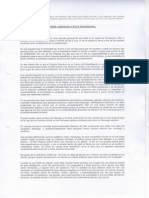
La idea que subyace al mtodo de biseccin es muy intuitiva, esto es, el hecho de que la pendiente (derivada) sea
positiva o negativa en una solucin de prueba indica de forma definitiva si la mejora respectiva cae de inmediato a
la derecha o a la izquierda. De esta forma, si la derivada evaluada en un valor particular de x es positiva, entonces x*
debe ser mayor que dicha x (vea la figura 12.12), de manera que sta se convierte en una cota inferior para las
soluciones de prueba que deben considerarse de este punto en adelante. De manera inversa, si la derivada es
negativa, entonces x* debe ser menor que esta x, por lo cual sta se convertira en una cota superior. Por tanto,
despus de que se han identificado ambos tipos de cotas, cada nueva solucin de prueba seleccionada entre las cotas
actuales proporciona un intervalo ms estrecho de alguno de los dos tipos, con lo que reduce la bsqueda de ah en
FIGURA 12.12: Problema de
programacin no restringida de una
variable cuando la funcin es cncava.
20
adelante. Cuando se usa una regla razonable para seleccionar cada solucin de prueba de esta forma, la secuencia
resultante de soluciones de prueba debe converger a x*. En la prctica, esto significa continuar la secuencia hasta que
la distancia entre las cotas sea tan pequea como para que la siguiente solucin de prueba est dentro de una
tolerancia de error para x* especificada con anterioridad.
Este proceso completo se resume a continuacin, dada la notacin
solucin de prueba actual,
= cota inferior actual para x*,
= cota superior actual para x*,
Tolerancia del error de x*.
Aunque existen algunas reglas razonables para seleccionar cada nueva solucin de prueba, la que se utiliza en el
mtodo de biseccin es la regla del punto medio llamada en forma tradicional plan de bsqueda de Bolzano, la
cual dice simplemente que se debe seleccionar el punto medio entre las dos cotas actuales.
Resumen del mtodo de biseccin
Paso inicial: Seleccione Encuentre la y iniciales por inspeccin o mediante la ubicacin de cualesquiera
valores respectivos de x en los cuales la derivada sea positiva y negativa.
Seleccione una solucin de prueba inicial
Ejemplo. Suponga que la funcin que debe maximizarse es
f (x) = 12x 3x
4
2x
6
,
como se grafica en la figura 12.13. Sus primeras dos derivadas son
Debido a que la segunda derivada es no positiva en todas partes, f (x) es una funcin cncava, por lo que el mtodo
de biseccin puede aplicarse con seguridad para encontrar su mximo global (en el supuesto de que ste exista).
21
Mtodo de Newton
FIGURA 12.13: Ejemplo del mtodo
de biseccin.
22
Aunque el mtodo de biseccin es un procedimiento intuitivo y directo, tiene la desventaja de que converge de una
manera relativamente lenta hacia una solucin ptima. Cada iteracin slo disminuye la diferencia entre las cotas a la
mitad. Por lo tanto, aun con la funcin tan simple que se consider en la tabla 12.1, se requirieron siete iteraciones
para reducir la tolerancia al error de x* a menos de 0.01. Para reducir esta tolerancia al error a menos de 0.0001 se
requeriran otras siete iteraciones.
La razn bsica de esta convergencia lenta es que la nica informacin que se ha usado sobre f (x) es el valor de la
primera derivada f (x) en los respectivos valores de prueba de x. Si se considerara tambin la segunda derivada
f(x), se podra obtener informacin adicional til. Este enfoque es el que aplica el mtodo de Newton.
La idea bsica detrs del mtodo de Newton es aproximar f (x) a la vecindad de la solucin de prueba inicial
mediante una funcin cuadrtica y despus maximizar (o minimizar) la funcin aproximada exactamente para
obtener la nueva solucin de prueba y as iniciar la siguiente iteracin. (Esta idea de trabajar con una aproximacin
cuadrtica de la funcin objetivo se ha convertido en una caracterstica clave de muchos algoritmos para tipos ms
generales de problemas de programacin lineal.) Esta funcin cuadrtica de aproximacin se obtiene al truncar la
serie de Taylor despus del trmino de la segunda derivada. En particular, se considera que x
i+1
es la solucin de
prueba generada en la iteracin i para iniciar la iteracin i + 1 de manera que x
1
es la solucin de prueba que
proporciona el usuario para comenzar la iteracin 1, por lo que la serie de Taylor truncada para x
i+1
es
23
Simplificando tambin tenemos que
(2)
24
Si x
1
= 1
x
2
= 1 -
(
)
(
)
= 1 -
= 0.875
x
3
= 0.875 -
(
)
(
)
= 0.875 -
()
()
x
3
= 0,840027029
Tambin se puede utilizar la siguiente funcin
(3)
Ejemplo
Ilustracin del proceso iterativo en el mtodo de Newton-Raphson
Por lo tanto, para el mtodo de Newton-Raphson, tenemos
Iniciando con x
0
= 10, la siguiente tabla proporciona las iteraciones sucesivas:
25
OPTIMIZACIN NO RESTRINGIDA DE VARIAS VARIABLES
Ahora considere el problema de maximizar una funcin cncava f (x) de variables mltiples, x = (x
1
, x
2
, . . ., x
n
), en la
que no existen restricciones sobre los valores factibles. Suponga de nuevo que la condicin necesaria y suficiente
para la optimalidad, dada por el sistema de ecuaciones que se obtiene al establecer las respectivas derivadas parciales
iguales a cero, no se puede resolver en forma analtica, por lo que debe emplearse un procedimiento de bsqueda
numrico.
Igual que en el caso de una variable, existen varios procedimientos de bsqueda para resolver este tipo de problema
en forma numrica. Uno de stos el procedimiento de bsqueda del gradiente es muy importante porque
identifica y utiliza la direccin de movimiento, desde la solucin de prueba actual, que maximiza la tasa a la cual se
incrementa f(x). sta es una de las ideas clave de la programacin no lineal. Las adaptaciones de esta idea para tomar
en cuenta las restricciones tambin son una caracterstica central de muchos algoritmos que se utilizan para llevar a
cabo una optimizacin restringida.
Despus de analizar este procedimiento con algn nivel de detalle, se describir en forma breve cmo se extiende el
mtodo de Newton al caso de las variables mltiples.
Procedimiento de bsqueda de gradiente
En secciones anteriores se us el valor de la derivada ordinaria mediante el mtodo de biseccin para elegir una de
slo dos direcciones posibles (aumentar x o disminuir x) para pasar de la solucin de prueba actual a la siguiente. La
meta era alcanzar, en algn momento, un punto en el que la derivada fuera (en esencia) cero. Ahora se tienen
innumerables direcciones posibles hacia dnde moverse; corresponden a las tasas proporcionales posibles a las
cuales las respectivas variables pueden cambiar. La meta es alcanzar, finalmente, un punto en el que todas las
derivadas parciales sean en esencia 0. Por tanto, la extensin del procedimiento de bsqueda en una dimensin
requiere emplear los valores de las derivadas parciales para seleccionar la direccin especfica en la que conviene
moverse. Esta seleccin implica el uso del gradiente de la funcin objetivo, como se describir en seguida.
26
Una analoga puede ayudar a aclarar este procedimiento. Suponga que una persona quiere subir a la cumbre de una
montaa. Esta persona es miope y no puede ver la cumbre para caminar en esa direccin, pero cuando se detiene,
puede ver el piso a su alrededor y determinar la direccin en la que la pendiente de la montaa es ms pronunciada.
La persona puede caminar en lnea recta.
27
Mientras camina, tambin es capaz de percibir cundo ya no va hacia arriba (pendiente cero en esa direccin). Bajo
el supuesto de que la montaa es cncava, el individuo puede usar el procedimiento de bsqueda del gradiente para
escalar de manera eficiente hasta la cima. Este problema tiene dos variables, donde (x
1
, x
2
) representa las
coordenadas (se hace caso omiso de la altura) de la localizacin actual. La funcin f (x
1
, x
2
) da la altura de la montaa
en (x
1
, x
2
). La persona comienza cada iteracin en el lugar en que se encuentra (solucin de prueba actual) y
determina la direccin [en el sistema de coordenadas (x
1
, x
2
)] en la que la montaa tiene la mayor pendiente (la
direccin del gradiente) en ese punto. Despus, comienza a caminar en esa direccin fija y contina hacindolo
mientras sigue ascendiendo. Luego se detiene en un nuevo punto de prueba (solucin) cuando la montaa se nivela
en la direccin en que camina; en este punto se prepara para realizar otra iteracin en otra direccin. Estas iteraciones
continan, en una trayectoria en zigzag hacia arriba, hasta que alcanza un punto de prueba en el que la pendiente es
en esencia cero en todas direcciones. Bajo el supuesto de que la montaa [ f (x
1
, x
2
)] es cncava, en principio, la
persona debe estar en la cima de la montaa.
Por lo general, la parte ms difcil del procedimiento de bsqueda del gradiente es encontrar t*, el valor de t que
maximiza f en la direccin del gradiente, en cada iteracin. Como x y f(x) tienen valores fijos para la maximizacin
y como f(x) es cncava, este problema se debe ver como el de maximizar una funcin cncava de una sola variable
t. En efecto, se puede resolver con el tipo de procedimientos de bsqueda de la optimizacin no restringida de una
sola variable descritos en secciones anteriores (donde la cota inferior inicial sobre t debe ser no negativa por la
restriccin de t 0).
De otra manera, si f es una funcin simple, es posible que se pueda obtener una solucin analtica al establecer la
derivada con respecto a t igual a cero para despus resolver.
Resumen del procedimiento de bsqueda del gradiente
28
29
30
31
Ejemplo: Maximizar la siguiente funcin, utilizando el mtodo de la gradiente.
Max f(x
1
, x
2
) = 7x
1
+ 4x
2
+ x
1
x
2
-
Se obtiene primero los contornos o curvas de nivel. Se tiene que de la funcin dada que
x
1
=
)
Para un valor constante f(x
1
, x
2
), y dndole valores a x
2
, se obtienen valores de x
1
. As por ejemplo, para f(x
1
, x
2
) =
12, se tiene:
x
2
x
1
0 4 y 3
2 8 y 1
4 9.77 y 1.23
8 11 y 4
10 9 y 8
Estos puntos forman un contorno en forma de una elipse. En forma similar se obtiene contornos elipses en este caso
para f(x
1
, x
2
) = 28, f(x
1
, x
2
) = 30.8. Grficamente se muestran los contornos en la figura7.20.
El punto mximo (global en este caso) , se puede obtener fcilmente por mtodos del clculo diferencial y es x
1
= 6,
x
2
= 5, con f(x
1
, x
2
) = 31
Se supone que arbitrariamente el alpinista se encuentra en un punto x
o
de coordinadas (
) = (8, 2), a una altura
de f(x
1
, x
2
) = 12 unidades. El gradiente de la funcin en ese punto indicara la direccin de movimiento y sta ser
desde luego perpendicular a la tangente del contorno de f(x
1
, x
2
) = 12 en el punto X
0
. Se tiene
Empleando la formula X
1
=
, donde A = -1, B = (7 + X
2
) y C = 4X
2
-
)
32
() [
] = [
]
(
) = [
()
()
] = [
]
En este punto X
o
el alpinista sabe, por la informacin que le proporciona el gradiente, que un movimiento de
una unidad en la direccin X
1
hace decrecer el nivel de f(X
1
, X
2
) en 7 unidades. En cambio, un movimiento
unitario en la direccin X
2
, hace crecer el nivel de f(X
1
, X
2
) en 8 unidades. Como el alpinista est interesado en
alcanzar la cima
Puesto que
= -7
Puesto que
= 8
De la montaa f(X
1
, X
2
), se mover en la direccin de X
2
. Pero qu longitud? Para aclarar esta incgnita, el
alpinista sabe que se encuentra en f(8, 2) = 12. Sabe tambin, que se va a mover en la direccin X
2
donde por cada
unidad de movimiento la funcin crecer 8 unidades. Por lo tanto, si se mueve k unidades en esa direccin, se
colocar en un segundo punto X
1
de coordenadas
X
1
= (
)
T
= (8, 2+8k)
En ese punto la funcin f(X
l
, X
2
) vale
f(X
1
, X
2
) = f(8, 2+8k) = 7(8) + 4(2+8k) + 8(2+8k) (8)
2
(2+8k)
2
f(X
1
, X
2
) = -64k
2
+ 64k +12
33
El mximo recorrido del alpinista por esa direccin, lo dar aquel valor de k que maximice a f ( 8 , 2 + 8 k) , es
decir,
( )
=
(
= -128k + 64 = 0
o sea que
k =
Si el alpinista llegara a desplazarse ms de 1 / 2 unidad por la direccin X
2
, subira por un tramo y tendera a bajar
despus de recorrer esa unidad, con un efecto neto menor, as slo se moviliza nicamente la unidad.
Por lo tanto el nuevo punto X
1
= (
), resultante de que el alpinista camine unidad (k=1/2), en la direccin
indicada ((
)), desde el punto de partida
= (8, 2) es:
= (8, 2+k)
= (8, 2+8(1/2))
= (8, 6),
Y la altura de la montaa f(X
1
, X
2
) en ese punto es:
f(8, 6) = 28,
O sea que el alpinista ha conseguido 16 unidades de ganancia en su ascenso (del punto X
0
con (
) =
( ) al punto X
1
con (
) ()
En ese punto el alpinista calcula una nueva direccin
(
) = [
()
()
] = [
],
Que le sugiere moverse en la direccin de X
1
aunque
sea negativa, puesto que si se mueve en la direccin de X
2
,
no habr una variacin de (
), ya que
La caminata en la direccin de X
1
le indica que la coordenada
X
1
deber reducirse en -3k unidades, siendo k la longitud caminada en direccin X
1
. As se tiene
( ) ( ) () ( )() ( )
= -
y
()
=
(
= ,
Por lo que k = y el nuevo punto X
2
= (
) es
(
)
T
= ( , 6)
=(8-3(1/2)), 6)
= (6.5, 6)
La funcin (
) en ese punto tiene una altura de ( )
Para una ganancia de 2.25 unidades. En ese punto X
2
, el alpinista vuelve a calcular una direccin (
) y una
longitud k, a recorrer en esa direccin. En efecto
(
) = [
()
()
] = [
],
34
El gradiente sugiere un movimiento en la direccin de X
2
a un nuevo punto X
3
= (
)
T
= (6.5, 6 - 1.5k). El
clculo de k proviene de
( )
= ,
Es decir,
( ) () ( ) ( ) ()
( )
= -
Por tanto
( )
= -
El nuevo punto X
3
= (
es:
(6.5, 6-1.5k) = (6.5, 6 1.5(0.5) = (6.5, 5.25),
Que genera una altura de f(6.5, 5.25) = 30.81
Con una ganancia de 0.56 unidades. El proceso se sigue repitiendo hasta que en dos iteraciones sucesivas (la k 1y
la k), (
) (
) ,
Donde es una tolerancia arbitraria.
En forma grfica se tienen a continuacin los pasos del alpinista.
Note cmo la solucin iterativa de este proceso converge al punto ptimo (6, 5) que genera un valor de f(X
1
, X
2
) =
f(6, 5 ) = 31
35
Figura 7.21
Mtodo de Newton
En secciones anteriores se describe cmo se puede usar el mtodo de Newton para resolver problemas de
optimizacin restringida con una sola variable. En realidad, la versin general del mtodo de Newton est diseada
para resolver problemas de optimizacin restringida con variables mltiples.
La idea bsica es la misma que se describi en la seccin 12.4, es decir, se trabaja con una aproximacin cuadrtica
de la funcin objetivo f (x), donde, en este caso, x = (x
1
, x
2
, . . ., x
n
). Esta funcin cuadrtica de aproximacin se
obtiene al truncar la serie de Taylor alrededor de la solucin de prueba actual despus del trmino de la segunda
derivada. Despus, esta funcin aproximada se maximiza (o minimiza) exactamente para obtener la nueva solucin
de prueba para iniciar la siguiente iteracin.
Cuando la funcin objetivo es cncava y tanto la solucin de prueba actual x como su gradiente (x) se escriben
como vectores columna, la solucin x que maximiza la funcin cuadrtica de aproximacin tiene la forma
)(
) (Para minimizacin)
)(
) (Para maximizacin)
Donde H es la matriz de n x n (llamada matriz hessiana) de la segunda derivada parcial de () evaluada en la
solucin de prueba actual x y H
-1
es la inversa de esta matriz hessiana.
es arbitrario
Los algoritmos de programacin no lineal que emplean el mtodo de Newton incluso aquellos que lo adaptan para
ayudar a tratar con problemas de optimizacin restringida por lo general aproximan el inverso de la funcin
hessiana de varias maneras. Estas aproximaciones del mtodo de Newton son conocidas como mtodos cuasi-
Newton (o mtodos mtricos variables).
En Matemtica, la matriz hessiana o hessiano de una funcin f de n variables, es la matriz cuadrada de n n, de las
segundas derivadas parciales.
Si todas las segundas derivadas parciales de f existen, se define la matriz hessiana de f como:
(), donde
MATRIZ HESSIANA DE DOS VARIABLES
Si tenemos un ejercicio con dos variables, obtendremos una matriz hessiana 2 x 2. Si el ejercicio fuera de tres
variables, la matriz gesiana ser 3 x 3, y as sucesivamente. Para el caso de dos variables, la matriz hessiana 2 x 2 se
genera de la siguiente manera:
[
]
[
En este trabajo se estar usando la notacin que aparece en el miembro izquierdo de las ecuaciones por considerarlo
ms sencillo de comprender a primera vista.
MATRIZ HESSIANA DE TRES VARIABLES
Antes de presentar ejemplos, se muestra la matriz resultante cuando se trabaja con ejercicios o problemas de tres variables. La
matriz hessiana ser de 3 x 3 y queda de esta forma:
36
[
]
SIGNIFICADO DE CADA ELEMENTO DE LA MATRIZ HESSIANA DE TRES VARIABLES
Con el objetivo de explicar cada detalle con la mayor claridad posible, se expresa el significado de cada uno de los
elementos que aparecen dentro de la matriz:
Significa que se deriva la funcin original por primera vez con respecto a x y luego ese resultado se
deriva por segunda vez con respecto a x nuevamente.
Significa que se deriva la funcin original por primera vez con respecto a x y luego ese resultado se
deriva por segunda vez pero ahora con respecto a y.
Significa que se deriva la funcin original por primera vez con respecto a x y luego ese resultado se
deriva por segunda vez pero ahora con respecto a z.
Significa que se deriva la funcin original por primera vez con respecto a y y luego ese resultado se
deriva por segunda vez pero ahora con respecto a x.
Significa que se deriva la funcin original por primera vez con respecto a y y luego ese resultado se
deriva por segunda vez con respecto a y nuevamente.
Significa que se deriva la funcin original por primera vez con respecto a y y luego ese resultado se
deriva por segunda vez pero ahora con respecto a z.
Significa que se deriva la funcin original por primera vez con respecto a z y luego ese resultado se
deriva por segunda vez pero ahora con respecto a x.
Significa que se deriva la funcin original por primera vez con respecto a z y luego ese resultado se
deriva por segunda vez pero ahora con respecto a y.
Significa que se deriva la funcin original por primera vez con respecto a z y luego ese resultado se
deriva por segunda vez con respecto a z nuevamente.
Antes de continuar se debe decir que para ser capaces de resolver problemas utilizando matrices hessianas se
debe poder resolver sin problemas determinantes cuadradas, pues es algo que se utiliza al trabajar con matrices. En
este trabajo no se explica cmo resolver determinantes cuadradas pero se aclara que es algo indispensable en el
trabajo y resolucin de problemas utilizando matrices hessianas.
PASOS A SEGUIR PARA ENCONTRAR MXIMOS Y MNIMOS UTILIZANDO MATRICES
HESSIANAS
1. Tener la funcin original que se va a trabajar.
2. Calcular las primeras derivadas parciales de la funcin con respecto a cada una de las variables que se tiene
la funcin original.
3. Igualar a cero las primeras derivadas que se calcularon en el paso 2.
4. Simultanear las ecuaciones generadas en el paso 3 para encontrar el valor de cada una de las variables.
Esos valores encontrados para cada una de las variables sern las coordenadas de los puntos crticos.
5. Teniendo los puntos crticos que se encontraron en el paso 4, se tiene que calcular las segundas derivadas
parciales en el punto crtico de modo que asignemos los valores de cada elemento de la matriz hessiana, ya
sea matriz 2 x 2 (si la funcin es de 2 variables), 3 x 3 (si la funcin es de 3 variables), 4 x 4 (si la funcin
es de 4 variables), n x n (si la funcin es de n variables).
6. Resolver la matriz hessiana normalmente como se resuelve la determinante de una matriz cuadrada. El
resultado que se obtenga de la matriz hessiana es la respuesta.
7. Se sacan conclusiones de la respuesta obtenida en el paso 6 de la siguiente manera:
37
CASO DE DOS VARIABLES O MATRIZ HESSIANA 2 X 2:
a. Si el determinante de la matriz hessiana es mayor que cero, entonces se procede a ver si
es positivo o
negativo. Si
es positivo o mayor que cero entonces la funcin tiene un MNIMO en el punto crtico.
Si
es negativo o menor que cero entonces la funcin tiene un MXIMO en el punto crtico.
b. Si el determinante de la matriz hessiana es menor que cero entonces se concluye que la funcin tiene un PUNTO
DE SILLA en el punto crtico.
c. Si el determinante de la matriz hessiana es cero entonces se concluye que NO HAY INFORMACIN o EL
CRITERIO NO ES CONCLUYENTE.
CASO DE TRES O MS VARIABLES O MATRIZ HESSIANA 3 X 3 O N X N:
a. Si todos los determinantes de la matriz hessiana tienen signo positivo, entonces la funcin tiene un MNIMO en
el punto crtico.
b. Si los determinantes tienen signo alterno (comenzando con un valor negativo), entonces la funcin tiene un
MXIMO en el punto crtico.
c. Si no se cumple lo dicho en los literales a) y b), o sea en cualquier otro caso se concluye que HAY DUDA, NO
HAY INFORMACIN o EL CRITERIO NO ES CONCLUYENTE.
NOTA: En el caso de tener funciones de tres o ms variables significa que comenzaremos trabajando la matriz
hessiana f(x) o de 1 x 1, luego f(x, y) o de 2 x 2, luego f(x, y, z) o de 3 x 3, hasta llegar a f(x, y, z,n) o de n x n.
As llegaremos finalmente a concluir si se trata de mximo, mnimo o si no se sabe, de acuerdo a los tres literales
anteriores.
EJEMPLO DE APLICACIN DE MATRIZ HESSIANA
Encontrar los mximos y mnimos (si los hay) de la funcin:
f(x, y, z) = x + y + 7z - xy
Solucin:
Calculando las primeras derivadas parciales de la funcin con respecto a cada una de las variables que tiene la
funcin original:
Igualando a cero las primeras derivadas:
22x y = 0
2y x = 0
14z = 0
Simultanear las ecuaciones anteriores para encontrar los valores de x, y, z, que sern las coordenadas de los
puntos crticos:
Al simultanear las ecuaciones obtenemos que los valores de x, y, z (o sea los puntos crticos) son:
x = 1/3
y = 2/3
z = 0
Esto significa que las coordenadas del punto crtico son: f(1/3,2/3,0).
Calcular las segundas derivadas en el punto crtico para generar la matriz hessiana:
Resolver la matriz hessiana tal como se resuelve la determinante de una matriz cuadrada:
38
()
[
()
[
]
H(x, y, z) = -6
Sacar conclusiones de la respuesta obtenida:
La determinante de la matriz hessiana H(x) o de 1x1 da como resultado 2 (resultado negativo).
La determinante de la matriz hessiana H(x, y) o de 2x2 da como resultado 3 (resultado positivo).
La determinante de la matriz hessiana H(x, y, z) o de 3x3 da como resultado -6 (resultado negativo).
Anteriormente se explic que "Si los determinantes tienen signo alterno (comenzando con un valor negativo),
entonces la funcin tiene un MXIMO en el punto crtico." Tal como se acaba de ver, los signos se alternan
porque tenemos -2, +3 y -6, lo cual significa que la funcin la funcin tiene un MXIMO en el punto crtico.
Conclusin de la resolucin del ejercicio:
La funcin f(x, y, z) = x + y + 7z - xy es o tiene un mximo en el punto crtico (1/3,2/3,0).
Generalizando, tenemos que:
()
()
Tomando la siguiente forma
()
[
Ejecute dos iteraciones del mtodo de Newton-Raphson con la funcin:
f(x, y) = x + y + x
2
y + xy
2
Partiendo del punto P(0.3, 0.6).
Solucin
Como
f(x, y) = x + y + x
2
y + xy
2
Tenemos
fx = 1 + 2xy + y
2
fy = 1 + x
2
+ 2xy
fxx = 2y
fxy = 2x + 2y
fyy = 2x
Por tanto,
() [
() [
]
39
Con estos clculos procedemos a hacer la siguiente tabla: (en ella, la coma se usa para indicar que los puntos deben
considerarse como vector columna)
Primera iteracin
Punto inicial x
0
= (0.3, 0.6)
() [
] = [
()()
()()
] [
() [
] [
() () ()
() () ()
] = [
]
Para calcular el inverso de la matriz anterior existen varios mtodos, uno de ellos es el siguiente para una matriz de
2x2
A
-1
= [
]
()
[
]
[
]
Calculamos el determinante
Det(H) = 1.2*0.6 1.8*1.8 = 0.72 3.24 = -2.52
H
-1
=
[
]
[
] [
]
)(
) (Para minimizacin)
X
1
= [
] [
] [
] [
] [
()() ()()
()() ()()
] [
]
[
] [
]
El nuevo punto es:
X
1
= [
]
Segunda iteracin
Partimos del punto X
1
= [
]
Encontramos la gradiente en el nuevo punto
(
) [
] = [
()()
()
()()
] [
]
Calculamos la nueva matriz H, con los nuevos valores de X
1
) [
]= [
() ()
() () ()
]
40
) [
]
Calculamos el determinante
Det(H) = (0.123788)(- 0.652406) - ( -0.528618)(- 0.528618)= - 0.08076-0.27943699= - 0.360197
Reacomodamos la matriz H, para convertirlo en matriz Hessiana
[
] = [
]
)(
) = [
]*[
]
=[
] [
]
X
2
= [
] [
]=
X
2
= [
]
OPTIMIZACIN RESTRINGIDA CON RESTRICCIONES DE IGUALDAD
Multiplicadores de Lagrange
Muchos problemas de optimizacin tienen restricciones, o ligaduras, para los valores que pueden usarse para dar la
solucin ptima. Tales restricciones tienden a complicar los problemas de optimizacin porque la solucin ptima
puede presentarse en un punto frontera del dominio. En esta seccin se estudia una ingeniosa tcnica para resolver
tales problemas.
Ahora encontraremos los mximos y mnimos relativos de una funcin a la cual se imponen ciertas restricciones. Tal
situacin podra surgir si un fabricante desea minimizar una funcin de costos conjuntos y obtener un nivel particular
de produccin.
Suponga que queremos encontrar los extremos relativos de
Sujeta a la restriccin de que x, y y z deben satisfacer
Podemos transformar w, que es una funcin de tres variables, en una funcin de dos variables tal que la nueva
funcin refleje la restriccin (2). Despejando x en la ecuacin (2), obtenemos
que al sustituirla por x en la ecuacin (1), da
Como ahora, w est expresada como funcin de dos variables, para encontrar los extremos relativos seguimos el
procedimiento usual de hacer igual a 0 sus derivadas parciales:
41
Al resolver simultneamente las ecuaciones (5) y (6) obtenemos y= 1 y z = 2. Sustituyendo en la ecuacin (3),
obtenemos x = 1. Por tanto, el nico punto crtico de la ecuacin (1) sujeta a la restriccin representada por la
ecuacin (2) es (1, 1, 2). Si usamos la prueba de la segunda derivada en (4) cuando y = 1 y z = 2, tenemos
As, w sujeta a tal restriccin, tiene un mnimo relativo en (1, 1, 2).
Esta solucin se encontr usando la restriccin para expresar una de las variables en la funcin original en trminos
de las otras variables. A menudo esto no es prctico, pero existe otro procedimiento llamado mtodo de los
multiplicadores de Lagrange, que evita este paso y nos permite, no obstante, encontrar los puntos crticos.
El mtodo es como sigue. Suponga que tenemos una funcin f(x, y, z) sujeta a la restriccin g(x, y, z)=0. Construimos
una funcin nueva, F, de cuatro variables, definida por la siguiente expresin (donde O es la letra griega lambda):
Puede demostrarse que si (x
0
, y
0
, z
0
) es un punto crtico de f sujeto a la restriccin g(x, y, z) = 0, existir un valor de ,
digamos
, tal que (x
0
, y
0
, z
0
,
) es un punto crtico de F. El nmero
se llama multiplicador de Lagrange.
Adems, si (x
0
, y
0
, z
0
, ) es un punto crtico de F, entonces (x
0
, y
0
, z
0
) es un punto crtico de f, sujeto a la restriccin.
As, para encontrar los puntos crticos de f, sujetos a g (x, y, z) = 0, buscamos los puntos crticos de F. stos se
obtienen resolviendo las ecuaciones simultneas
{
A veces debe usarse el ingenio para hacer esto. Una vez que obtenemos un punto crtico (x
0
, y
0
, z
0
,
) de F,
podemos concluir que (x
0
, y
0
, z
0
) es un punto crtico de f, sujeto a la restriccin g(x, y, z) = 0. Aunque f y g son
funciones de tres variables, el mtodo de los multiplicadores de Lagrange puede extenderse a n variables.
Ilustremos el mtodo de los multiplicadores de Lagrange para el caso original, a saber,
Primero, escribimos la restriccin como g(x, y, z) = x y + 2z 6 = 0.
Segundo, formamos la funcin
A continuacin, hacemos cada derivada parcial de F igual a 0.
{
()
()
()
()
42
De las ecuaciones (7), (8) y (9), de inmediato vemos que
Por tanto, el nico punto crtico de f, sujeto a la restriccin, es (1, 1, 2), donde puede existir un mximo relativo, un
mnimo relativo o ninguno de stos. El mtodo de los multiplicadores de Lagrange no indica directamente cul de
estas posibilidades se presentar, aunque por lo visto antes sabemos que se trata de un mnimo relativo. En los
problemas de aplicacin, la naturaleza del problema puede darnos una idea de cmo considerar un punto crtico. A
menudo se supone la existencia ya sea de un mnimo relativo o de un mximo relativo y un punto crtico, se trata de
acuerdo con tal hiptesis. En realidad se dispone de condiciones de segundo orden suficientes para los extremos
relativos, pero no las consideraremos aqu.
EJEMPLO 1 Mtodo de los multiplicadores de Lagrange Es el mtodo de los multiplicadores de Lagrange.
43
Para ver cmo funciona esta tcnica, supngase que se quiere hallar el rectngulo de rea mxima que puede
inscribirse en la elipse dada por
44
Ahora considere el problema de encontrar el mnimo o mximo de la funcin f (x), sujeta a la restriccin de que x
debe satisfacer todas las ecuaciones
45
46
EJEMPLO 3 Minimizacin de costos
47
EJEMPLO 5 Mtodo de los multiplicadores de Lagrange con dos restricciones
48
CONDICIONES DE KARUSH-KUHN-TUCKER (KKT) PARA OPTIMIZACIN
RESTRINGIDA
La pregunta ahora es cmo reconocer una solucin ptima para un problema de programacin no lineal (con
funciones diferenciables). Cules son las condiciones necesarias y (tal vez) suficientes que esa solucin debe
cumplir?
En las secciones anteriores se hicieron notar estas condiciones para optimizacin no restringida, como se resume en
los primeros dos renglones de la tabla 12.4. Al principio de la seccin 12.3 tambin se expusieron estas condiciones
para la ligera extensin de optimizacin no restringida cuando slo se tienen restricciones de no negatividad. En el
tercer rengln de la tabla 12.4 se muestran estas condiciones. Como se indica en el ltimo rengln de la tabla, las
condiciones para el caso general se llaman condiciones de Karush-Kuhn-Tucker (o condiciones KKT), porque fueron
desarrolladas de manera independiente por Karush y por Kuhn y Tucker. Su resultado bsico se expresa en el
siguiente teorema.
49
Cuando m = 0 (sin restricciones funcionales), esta suma se elimina y la condicin combinada (1, 2) se reduce a la
condicin que se presenta en el tercer rengln de la tabla 12.4. As, para m 0, cada trmino de la suma modifica la
condicin de m = 0 para incorporar el efecto de la restriccin funcional correspondiente.
50
En las condiciones 1, 2, 4 y 6, las u
i
corresponden a las variables duales de programacin lineal al final de la
seccin se estudia ms a fondo esta correspondencia que tienen una interpretacin econmica comparable. En
realidad, las u
i
surgieron de la derivacin matemtica, como los multiplicadores de Lagrange (que se presentaron en
el apndice 3). Las condiciones 3 y 5 slo ayudan a asegurar la factibilidad de la solucin. Las otras condiciones
eliminan la mayor parte de las soluciones factibles como posibles candidatos para una solucin ptima.
Debe hacerse notar que el cumplimiento de estas condiciones no garantiza que la solucin sea ptima. Como se
resume en la ltima columna de la tabla 12.4, son necesarios ciertos supuestos de convexidad adicionales para
obtener esta garanta. Estos supuestos se establecen de manera formal en la siguiente extensin del teorema.
51
52
En programacin matemtica, las condiciones de Karush-Kuhn-Tucker (tambin conocidas como las condiciones
KKT o Kuhn-Tucker) son condiciones necesarias y suficientes para que la solucin de un problema de programacin
matemtica sea ptima. Es una generalizacin del mtodo de los Multiplicadores de Lagrange
Las condiciones de optimalidad de Karush Kuhn Tucker (KKT) permiten abordar la resolucin de modelos de
Programacin No Lineal que consideran tanto restricciones de igualdad como desigualdad. En trminos
comparativos las condiciones de KKT son ms generales que el Mtodo de Lagrange el cual se puede aplicar a
problemas no lineales que consideran exclusivamente restricciones de igualdad. En el siguiente artculo mostraremos
cmo utilizar el Teorema de Karush Kuhn Tucker para resolver un problema no lineal con 2 variables de decisin.
Sin prdida de generalidad un modelo de Programacin No Lineal se puede representar a travs del siguiente
formato:
Luego podemos reescribir cualquier problema en dicha estructura manteniendo la equivalencia de la representacin
matemtica. Para ejemplificar lo anterior consideremos el siguiente modelo de optimizacin no lineal que resulta de
inters su resolucin.
53
El problema anterior se puede representar grficamente a travs del software Geogebra de modo de encontrar su
solucin ptima (x
1
=2 y x
2
=1) en la coordenada C con valor ptimo V(P)=2. El conjunto de factibilidad
corresponde al rea achurada y se puede observar que en la solucin ptima se encuentran activas las restricciones 1
y 3 (el resto de las restricciones por cierto se cumple pero no en igualdad).
Por supuesto la resolucin grfica es slo referencial y se ha utilizado en este caso para corroborar los resultados a
obtener en la aplicacin del teorema. En este contexto el problema en su forma estndar es simplemente:
Notar que slo fue necesario cambiar la forma de las restricciones de no negatividad (esto se puede hacer
multiplicando por -1 cada una de ellas). Cabe destacar que en este caso en particular el problema no considera
restricciones de igualdad. Luego las condiciones necesarias de primer orden de Karush Kuhn Tucker (KKT) estn
dadas por:
Por ejemplo si en las condiciones generales anteriores consideramos el problema no restringido (asumiendo que
todas las restricciones son inactivas) la solucin ptima por simple inspeccin es x
1
=3 y x
2
=2, que corresponde a la
coordenada E de la grfica anterior y que se puede observar no es a una solucin factible para el problema. Luego
la circunferencia de menor radio que intersecta el conjunto de factibilidad es precisamente aquella que pasa por la
54
coordenada C donde las restricciones 1 y 3 se cumplen en igualdad, razn por la cual las cuales activaremos de
forma simultanea:
Al calcular los gradientes respectivos se obtiene:
Lo cual da origen al siguiente sistema de ecuaciones:
Adicionalmente se puede verificar que x
1
=2 y x
2
=1 satisface las restricciones omitidas (2,4 y 5) por lo cual se puede
afirmar que dicha solucin cumple las condiciones necesarias de primer orden de Karush Kuhn Tucker (KKT).
A continuacin verificamos el cumplimiento de las condiciones de segundo orden de KKT, en particular lo que tiene
relacin con la convexidad del problema. Para ello calculamos la matriz Hessiana o de segundas derivadas de la
funcin objetivo y las restricciones activas.
El primer determinante de la Hessiana es D
1
=8/3>=0 y el segundo determinante es D
2
=(8/3)*(8/3)=(64/9)>=0. El
problema es convexo y por tanto x
1
=2 y x
2
=1 es mnimo local y global para el problema. La resolucin
computacional de este problema con AMPL corrobora los resultados alcanzados:
Ejercicios Propuestos
1. A partir de la solucin de prueba inicial (x
1
, x
2
) = (0, 0) aplique a mano una iteracin del procedimiento de
bsqueda del gradiente al siguiente problema:
Para completar esta iteracin, obtenga una aproximacin de t* mediante la aplicacin de dos iteraciones del mtodo
de biseccin con cotas iniciales
55
2. A partir de la solucin de prueba inicial (x1, x2) = (0, 0), aplique el procedimiento interactivo de bsqueda del
gradiente con 1 para obtener una solucin (aproximada) para el siguiente problema y luego aplique la
rutina automtica para desarrollar este procedimiento (con =0.01).
3. Considere el siguiente problema de optimizacin no restringida:
a. Si se inicia con la solucin de prueba inicial (x
1
, x
2
) = (1, 1), aplique de manera interactiva el procedimiento de
bsqueda del gradiente con 0.25 para obtener una solucin aproximada.
b. Resuelva el sistema de ecuaciones lineales que obtenga con f (x) = 0 para llegar a la solucin exacta.
4. En los problemas del 1 al 12 encuentre por el mtodo de los multiplicadores de Lagrange, los puntos crticos
de las funciones sujetas a las restricciones indicadas.
5. Aplicar el mtodo de newton para resolver los problemas siguientes
Con un valor inicial de x = 4
Y con un valor inicial de x = 0.5
You might also like
- Arancel 2012Document433 pagesArancel 2012Isaac ParilloNo ratings yet
- Gestion de PersonalDocument18 pagesGestion de PersonalJim ValerioNo ratings yet
- NTP 399.010-1 Señales de SeguridadDocument99 pagesNTP 399.010-1 Señales de SeguridadRenzo Chavez80% (5)
- Etica y MoralDocument4 pagesEtica y MoralJim ValerioNo ratings yet
- CubeDocument19 pagesCubeJim ValerioNo ratings yet
- Atica MoralDocument16 pagesAtica MoralJim ValerioNo ratings yet
- Apartado7 130726190834 Phpapp02Document29 pagesApartado7 130726190834 Phpapp02Jim ValerioNo ratings yet
- Algoritmoramificacionacotamientoproblemasbinarios PDFDocument9 pagesAlgoritmoramificacionacotamientoproblemasbinarios PDFJim ValerioNo ratings yet
- Partida ArancelariaDocument18 pagesPartida ArancelariaLeonel Alejandro Peña RamirezNo ratings yet
- F Esquemas AutomatismosDocument4 pagesF Esquemas AutomatismosEloy Agustin Sauciri HuancaNo ratings yet
- Ejercicios Costo-Tiempo PDFDocument41 pagesEjercicios Costo-Tiempo PDFJim ValerioNo ratings yet
- Etica y MoralDocument4 pagesEtica y MoralJim ValerioNo ratings yet
- Partida ArancelariaDocument18 pagesPartida ArancelariaLeonel Alejandro Peña RamirezNo ratings yet
- Resumen Calidad TotalDocument6 pagesResumen Calidad TotalJim ValerioNo ratings yet
- Reclutamiento Seleccion PersonalDocument12 pagesReclutamiento Seleccion PersonalJim ValerioNo ratings yet
- Proteccion Contra La CorrosionDocument6 pagesProteccion Contra La Corrosionrutylopez16No ratings yet
- Proteccion Contra La CorrosionDocument7 pagesProteccion Contra La Corrosionzerimar333No ratings yet
- De Stil AdoresDocument25 pagesDe Stil AdoresJim ValerioNo ratings yet
- Sesión 1Document14 pagesSesión 1Jim ValerioNo ratings yet
- Detalle de Tarea de ProductividadDocument1 pageDetalle de Tarea de Productividad62872No ratings yet
- Tablas de Interes CompuestoDocument32 pagesTablas de Interes CompuestoJonathan Alarcón100% (4)
- Programacion Entera 1Document25 pagesProgramacion Entera 1Jim ValerioNo ratings yet
- Estudio de Impacto Ambiental 2012Document21 pagesEstudio de Impacto Ambiental 2012Jim ValerioNo ratings yet
- Proteccion Contra La CorrosionDocument6 pagesProteccion Contra La Corrosionrutylopez16No ratings yet
- Caso La AztecaDocument1 pageCaso La AztecaJim Valerio100% (1)
- Apartado7 130726190834 Phpapp02Document29 pagesApartado7 130726190834 Phpapp02Jim ValerioNo ratings yet
- Aceros InoxidablesDocument7 pagesAceros InoxidablesSoplarvidrioNo ratings yet
- Resumen Calidad TotalDocument6 pagesResumen Calidad TotalJim ValerioNo ratings yet
- Lectura 01 - Liderazgo y EticaDocument2 pagesLectura 01 - Liderazgo y EticaJim ValerioNo ratings yet
- Desigualdades Ervin FigueroaDocument5 pagesDesigualdades Ervin FigueroaErvin FigueroaNo ratings yet
- Clase Funcion CubicaDocument2 pagesClase Funcion CubicaLacides Tafur100% (1)
- Corporación Universitaria Minuto de Dios Uniminuto Virtual Y A DistanciaDocument11 pagesCorporación Universitaria Minuto de Dios Uniminuto Virtual Y A DistanciaGiancarloNo ratings yet
- Reglamento Estudiantes MAT023 1 Semestre 2023Document10 pagesReglamento Estudiantes MAT023 1 Semestre 2023Juan Ignacio Viveros GutierrezNo ratings yet
- Manual-De-Solver-Transporte 01Document15 pagesManual-De-Solver-Transporte 01Villegas Vargas AnthonyNo ratings yet
- AMI-Tema 5 - Los Números Complejos PDFDocument3 pagesAMI-Tema 5 - Los Números Complejos PDFandres felipe sandoval porrasNo ratings yet
- Numeros RealesDocument11 pagesNumeros RealesSamlekk DueNo ratings yet
- 1.3 Programacion Dinamica DeterministicaDocument4 pages1.3 Programacion Dinamica DeterministicaChristian Gustavo Franco RodriguezNo ratings yet
- HFGHFHGFHDocument5 pagesHFGHFHGFHOliver Celis CelisNo ratings yet
- FuncionesDocument6 pagesFuncionesAlejandro García AraizaNo ratings yet
- 2020 Temario Matematica Segundo CicloDocument196 pages2020 Temario Matematica Segundo CicloCarolina González LeivaNo ratings yet
- Regla de La CadenaDocument8 pagesRegla de La CadenaPaulina BelenNo ratings yet
- Funciones Logarítmicas y ExponencialesDocument26 pagesFunciones Logarítmicas y ExponencialesAlexandraNo ratings yet
- Susti TrigonometricaDocument6 pagesSusti TrigonometricaChabeli Cruzado SuárezNo ratings yet
- TRABAJO PRACTICO #2 FACTORIZACION SextoDocument1 pageTRABAJO PRACTICO #2 FACTORIZACION SextoSilverio CachizumbaNo ratings yet
- Informe Laboratorio Fisica Segunda Ley de NewtonDocument17 pagesInforme Laboratorio Fisica Segunda Ley de NewtonMaria Paula LuboNo ratings yet
- Fracciones Clase 2Document8 pagesFracciones Clase 2Carina MelendesNo ratings yet
- Ejercicios de Progresiones Geometricas PDFDocument4 pagesEjercicios de Progresiones Geometricas PDFMatias TorqueaNo ratings yet
- Cap.1. Definición. Tipos de IndeterminaciónDocument9 pagesCap.1. Definición. Tipos de IndeterminaciónKa LoNo ratings yet
- Unidad 6 - Matematica-Ingreso AgrariasDocument13 pagesUnidad 6 - Matematica-Ingreso AgrariasferhumanistaNo ratings yet
- Exámenes Resueltos 2018-2019 PDFDocument267 pagesExámenes Resueltos 2018-2019 PDFDagne PovedaNo ratings yet
- Universidad Nacional Del Altiplano PunoDocument10 pagesUniversidad Nacional Del Altiplano PunoAnonymous H1Tv1hNo ratings yet
- ARITMETICADocument3 pagesARITMETICAHenry Campomanes ChávezNo ratings yet
- Euler PDFDocument3 pagesEuler PDFFelipe Pucha VargasNo ratings yet
- Solución Taller Sumativo 3 Par 18 PL 07.08.2020 Rev MRDocument5 pagesSolución Taller Sumativo 3 Par 18 PL 07.08.2020 Rev MRZuñiga Salazar Hamlet EnocNo ratings yet
- Solucion Numeros ComplejosDocument37 pagesSolucion Numeros ComplejosTato Mayo100% (1)
- Clasificacion de 1 VariedadesDocument2 pagesClasificacion de 1 VariedadesIoannis GreenNo ratings yet
- Matematicas para Ingenieria. Metodos NumericosDocument147 pagesMatematicas para Ingenieria. Metodos Numericossergio peraltaNo ratings yet
- AE NS Cuadernillo de FórmulasDocument13 pagesAE NS Cuadernillo de FórmulasafuentesNo ratings yet
- PD1 2022.2 - SolDocument34 pagesPD1 2022.2 - SolLisbeth GarciaNo ratings yet