You might also like
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyNo ratings yet
- Théorie de MécanismeDocument10 pagesThéorie de Mécanismemejri merinNo ratings yet
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopNo ratings yet
- Cours Analyse Des MecanismesDocument10 pagesCours Analyse Des MecanismesNeoXana01No ratings yet
- Theorie de Mecanismes 2021 - Part2Document15 pagesTheorie de Mecanismes 2021 - Part2Amine LaouitiNo ratings yet
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelNo ratings yet
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Cours CinetiqueDocument12 pagesCours CinetiquekiiramaNo ratings yet
- Corrige CC1 Calcul Des Structures 2017 2018Document6 pagesCorrige CC1 Calcul Des Structures 2017 2018Aya ChikerNo ratings yet
- Chapitre 5 Caracteristiques Inertie Des SolidesDocument21 pagesChapitre 5 Caracteristiques Inertie Des Solidesjoe100% (1)
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- CS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionDocument9 pagesCS-TM1-TD Hyperstatisme Bielle Manivelle CorrectionPierre LancelotNo ratings yet
- Chap 2 - Traction - Compression-1Document8 pagesChap 2 - Traction - Compression-1Medeho kodjo Simon henochNo ratings yet
- Liaisons Equival TDDocument18 pagesLiaisons Equival TDAyou HamNo ratings yet
- Cours TD Matrice InertieDocument24 pagesCours TD Matrice InertieSoundous TayssirNo ratings yet
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57No ratings yet
- TD 10 - Comportement Cinématique Des SystèmesDocument4 pagesTD 10 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- Cours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Document28 pagesCours Thèorie Des Mécanismes (CI - GOI-DFMI) 19-20Abderrahmane Ben ErajrajiNo ratings yet
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •No ratings yet
- (RDM) (CO) Resistance Des Materiaux PDFDocument30 pages(RDM) (CO) Resistance Des Materiaux PDFZoro LeadNo ratings yet
- Cinematique GraphiqueDocument5 pagesCinematique GraphiqueRey divino MoukouaNo ratings yet
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- TD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFDocument49 pagesTD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFmukoNo ratings yet
- DS TRS 2020 2021 CorrectionDocument4 pagesDS TRS 2020 2021 CorrectionHB RIMNo ratings yet
- Chapitre 2 TorseursDocument13 pagesChapitre 2 TorseursHediFatnassiNo ratings yet
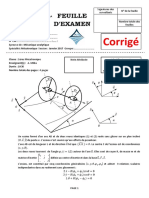
- Examen Jan 2017-CorrigéDocument3 pagesExamen Jan 2017-Corrigéyasahiro 10No ratings yet
- Dynamique SiDocument10 pagesDynamique Siamo norNo ratings yet
- S411 Analyse Des Mecanismes 4Document7 pagesS411 Analyse Des Mecanismes 4angamaNo ratings yet
- Td3corr PDFDocument7 pagesTd3corr PDFJames KroosNo ratings yet
- TD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiqueDocument4 pagesTD N°2 Cinématique Du Solide Composition Des Vitesses Torseur CinématiquemzoughiNo ratings yet
- 3 Cours Liaisons EquivalentesDocument4 pages3 Cours Liaisons EquivalentesMohamed Soibaha ChaambaneNo ratings yet
- Série Des Exercices Pour Les Chaines Des SolidesDocument6 pagesSérie Des Exercices Pour Les Chaines Des SolidesleeNo ratings yet
- Cours Theorie MecanismeDocument15 pagesCours Theorie Mecanismemaraghni_hassine7592No ratings yet
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Analyse Structurale Des MécanismesDocument13 pagesAnalyse Structurale Des MécanismesSalomon S. HoungbedjiNo ratings yet
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirNo ratings yet
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraNo ratings yet
- Chapitre 5 ExercicesDocument5 pagesChapitre 5 ExercicesYahiyaoui SofyaneNo ratings yet
- Cours Hyperstatique TempoDocument5 pagesCours Hyperstatique TempoSCORSAM1No ratings yet
- TD 17 - Liaisons Équivalentes PDFDocument5 pagesTD 17 - Liaisons Équivalentes PDFAbdelhakNo ratings yet
- Schéma CinématiqueDocument23 pagesSchéma CinématiqueRuroniNo ratings yet
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- BTS CPI Juin 2000 Palan Eurochain VL5 U41Document33 pagesBTS CPI Juin 2000 Palan Eurochain VL5 U41Yassire SamirNo ratings yet
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckNo ratings yet
- Chapitre V Analyse Dimensionnelle PDFDocument5 pagesChapitre V Analyse Dimensionnelle PDFFatma Zohra OUIRNo ratings yet
- Préparation Concours20 CinématiqueDocument7 pagesPréparation Concours20 CinématiqueAdamNo ratings yet
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Document8 pagesENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelNo ratings yet
- Theorie Des MécaDocument0 pagesTheorie Des MécaSemlali ZakariaNo ratings yet
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Document3 pagesChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrcheNo ratings yet
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyNo ratings yet
- Exercices Schéma CinématiqueDocument13 pagesExercices Schéma CinématiqueHajar Ben GaraâNo ratings yet
- Résumé CinétiqueDocument11 pagesRésumé CinétiqueAB lifestyleNo ratings yet
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriNo ratings yet
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiNo ratings yet
- Principe Fondamental de La StatiqueDocument8 pagesPrincipe Fondamental de La StatiqueFaouzi KoussaNo ratings yet
- These AmdecDocument226 pagesThese Amdecr_preNo ratings yet
- Conception QueDocument14 pagesConception Quer_preNo ratings yet
- Application de Workflow. Mise en Place Dans Une Entreprise IndustrielleDocument75 pagesApplication de Workflow. Mise en Place Dans Une Entreprise Industrieller_preNo ratings yet
- MEC3 MobiliteDocument7 pagesMEC3 Mobiliter_preNo ratings yet
- Formation Latex BookletDocument41 pagesFormation Latex Booklethassounbs100% (1)
- Me ReferencesDocument1 pageMe Referencesr_preNo ratings yet
- 04 Amortisseurs en Montage FixeDocument8 pages04 Amortisseurs en Montage FixeSaveli Paul FlorinNo ratings yet
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDONo ratings yet
- Correction Devoir Sn3 1as 2016Document7 pagesCorrection Devoir Sn3 1as 2016Nadhir Sakouhi100% (1)
- 2MP Sta CorrigeDocument36 pages2MP Sta CorrigeWael Ben SalemNo ratings yet
- TD AsservissementDocument9 pagesTD AsservissementAyoub ELJAFRYNo ratings yet
- Programme Sii Mpsi&Mp 2013&2014Document15 pagesProgramme Sii Mpsi&Mp 2013&2014zayd_bouNo ratings yet
- TD 09 MpsiDocument6 pagesTD 09 MpsiYassineNo ratings yet
- MS1 Cours1 Bases StatiqueDocument71 pagesMS1 Cours1 Bases StatiquemouloudNo ratings yet
- A. Arid RDM I 3Document145 pagesA. Arid RDM I 3Aicha Ahmed SalekNo ratings yet
- Analysestructure2018 2019Document132 pagesAnalysestructure2018 2019Feeling ManagementNo ratings yet
- Concours 2017 SI (Doc Énoncé)Document11 pagesConcours 2017 SI (Doc Énoncé)Lefi ABDELLAOUINo ratings yet
- Liaison MecaniqueDocument13 pagesLiaison MecaniqueSmirnov Artaéév100% (6)
- Variateur A CourroieDocument9 pagesVariateur A CourroieSaber Hamdi100% (1)
- Meca Mobilite Dev PDFDocument8 pagesMeca Mobilite Dev PDFzizo100% (1)
- Devoir Surveillé StatiqueDocument7 pagesDevoir Surveillé StatiqueD.j'oVEVONo ratings yet
- SismiqueDocument30 pagesSismiqueYouyou YanisNo ratings yet
- Chap 4 L5 Symboles Et Mobilité Des LiaisonsDocument38 pagesChap 4 L5 Symboles Et Mobilité Des LiaisonsAbdel Moula ChoucheneNo ratings yet
- CI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesDocument4 pagesCI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesKhaled JberiNo ratings yet
- ISO - Tractors and Machinery For Agriculture and ForestryDocument14 pagesISO - Tractors and Machinery For Agriculture and ForestryBilel BiloNo ratings yet
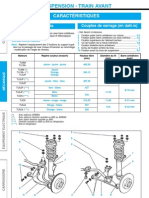
- Cple de Serrage 306Document4 pagesCple de Serrage 306Laurent SkoraNo ratings yet
- CM7-CONAN - Roulement Oblique VFDocument70 pagesCM7-CONAN - Roulement Oblique VFAntonin Donnadieu0% (1)
- 3 1 1 Modelisation LiaisonsDocument2 pages3 1 1 Modelisation Liaisonssebti abassiNo ratings yet
- 2.exercices Geometry Sol PDFDocument6 pages2.exercices Geometry Sol PDFSami BennourNo ratings yet
- Dessin Technique 2ème, 3ème, 4ème 1er Cycle Spe MécaDocument14 pagesDessin Technique 2ème, 3ème, 4ème 1er Cycle Spe MécaElla Kabongo100% (3)
- Analyse Catia V5 PDFDocument55 pagesAnalyse Catia V5 PDFkokakiki100% (1)
- 07 ADocument4 pages07 Aapi-3767116100% (1)
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfNo ratings yet
- 17 Terminologies CDocument2 pages17 Terminologies CmamanlaoualisabiouNo ratings yet
- 21 AssemblageDocument14 pages21 AssemblageHalim DalilNo ratings yet
- Support de Cours Technologie MecaniqueDocument98 pagesSupport de Cours Technologie MecaniqueMATOUMBA PAULINNo ratings yet