You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Oracle Alert To Send EmailDocument5 pagesOracle Alert To Send EmailSafy SafyNo ratings yet
- Professional Engineer Summary StatementDocument4 pagesProfessional Engineer Summary StatementfastwritenameNo ratings yet
- Arens Aud16 Inppt11Document37 pagesArens Aud16 Inppt11euncie100% (1)
- Dup Raghuram Resume (Design)Document2 pagesDup Raghuram Resume (Design)Raghuram CNo ratings yet
- Earthwork Excavation Method StatementDocument4 pagesEarthwork Excavation Method StatementPageduesca RouelNo ratings yet
- SBOM-Session 2 - Quality ManagementDocument54 pagesSBOM-Session 2 - Quality ManagementBalajiNo ratings yet
- Resources Management: Dr. Ahmed ElyamanyDocument35 pagesResources Management: Dr. Ahmed ElyamanysajjaduetNo ratings yet
- 930E-4 Field Assembly PDFDocument336 pages930E-4 Field Assembly PDFLucia Berry100% (9)
- Bill of QuantityDocument7 pagesBill of QuantityAnonymous YHVmpLoNo ratings yet
- Database-List Nama Kandidat ADMODocument178 pagesDatabase-List Nama Kandidat ADMOTravel AdmoNo ratings yet
- Mohammed Shaban, M.SC., PMP®: About MeDocument3 pagesMohammed Shaban, M.SC., PMP®: About MeMohammed ShabanNo ratings yet
- 5 Milling & DrillingDocument49 pages5 Milling & DrillingSmriti MakkarNo ratings yet
- A64 Cable Stringer S DatasheetDocument9 pagesA64 Cable Stringer S DatasheetCruzado Vilca AmesquitaNo ratings yet
- Bashir Ahmad NewDocument3 pagesBashir Ahmad NewBashir AhmadNo ratings yet
- Weco Butterfly Valve ActuatorsDocument20 pagesWeco Butterfly Valve ActuatorsimmanjNo ratings yet
- Glassco Catalogo PDFDocument369 pagesGlassco Catalogo PDFFarmacia Mineralin Nivel IINo ratings yet
- Department of Defense Test Method Standard: Dod Preferred Methods For Acceptance of ProductDocument33 pagesDepartment of Defense Test Method Standard: Dod Preferred Methods For Acceptance of ProductSinan ChenNo ratings yet
- The Building and Other Constn Workers Rules, A100507Document183 pagesThe Building and Other Constn Workers Rules, A100507Josh Ch100% (1)
- Guide Electrcial Workers Safety EquipmentDocument78 pagesGuide Electrcial Workers Safety EquipmentKy TaNo ratings yet
- Cat 4190 HBMDocument7 pagesCat 4190 HBMSrta IncognitaNo ratings yet
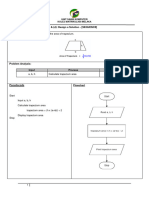
- 2 1 B & D TUTORIAL QUESTION Design A Solution ANSWER SCHEMEDocument45 pages2 1 B & D TUTORIAL QUESTION Design A Solution ANSWER SCHEME2022461692No ratings yet
- 22 08 2016Document10 pages22 08 2016Loyola VijayawadaNo ratings yet
- Introduction To Design of Steel StructuresDocument32 pagesIntroduction To Design of Steel StructuresDarsHan MoHanNo ratings yet
- How The TOMRA Field Potato Sorter Improves Your SortDocument6 pagesHow The TOMRA Field Potato Sorter Improves Your SortJorge Luis Alonso G.No ratings yet
- 1.1 Company Profile: Financial Analysis of Ashok Leyland LimitedDocument120 pages1.1 Company Profile: Financial Analysis of Ashok Leyland LimitedSuraj OVNo ratings yet
- Standard Products: INR Price List No. DFL-08 Effective 1st Oct 2018Document11 pagesStandard Products: INR Price List No. DFL-08 Effective 1st Oct 2018RAHUL RICONo ratings yet
- BEE Code LightingDocument37 pagesBEE Code LightingRAJESHNo ratings yet
- Project and Claim Management at A Glance: Matthias Lichtenthaler Accenture GMBH MunichDocument5 pagesProject and Claim Management at A Glance: Matthias Lichtenthaler Accenture GMBH MunichSubramanian SaravananNo ratings yet
- LVD GuideDocument38 pagesLVD GuideFelix DiazNo ratings yet