You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Lesson I. Background InformationDocument21 pagesLesson I. Background InformationsuidivoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Second Grading EappDocument2 pagesSecond Grading EappConnieRoseRamos100% (2)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- SAP CRM Tax ConfigurationDocument18 pagesSAP CRM Tax Configurationtushar_kansaraNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Confidential Recommendation Letter SampleDocument1 pageConfidential Recommendation Letter SamplearcanerkNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fortune 2010Document14 pagesFortune 2010Stefan JenkinsNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Caltech RefDocument308 pagesCaltech RefSukrit ChatterjeeNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- OrthoDocument22 pagesOrthosivaleela gNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Case Digest GR No 90501 NetDocument4 pagesCase Digest GR No 90501 Netlawnotesnijan100% (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- CV AmosDocument4 pagesCV Amoscharity busoloNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- RFP On Internal AuditDocument33 pagesRFP On Internal AuditCan dien tu Thai Binh DuongNo ratings yet
- Mathematicaleconomics PDFDocument84 pagesMathematicaleconomics PDFSayyid JifriNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Modelling of Short Duration Isopluvial Map For Raichur District KarnatakaDocument4 pagesModelling of Short Duration Isopluvial Map For Raichur District KarnatakaMohammed Badiuddin ParvezNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Appellees Brief CIVILDocument7 pagesAppellees Brief CIVILBenBulacNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Filipino HousesDocument4 pagesFilipino HousesjackNo ratings yet
- Su Jok, Twist Therapy AND Smile MeditationDocument7 pagesSu Jok, Twist Therapy AND Smile MeditationprateekNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Mathematics in The Primary Curriculum: Uncorrected Proof - For Lecturer Review OnlyDocument12 pagesMathematics in The Primary Curriculum: Uncorrected Proof - For Lecturer Review OnlyYekeen Luqman LanreNo ratings yet
- Republic Vs CA - Land Titles and Deeds - GR No. 127060Document3 pagesRepublic Vs CA - Land Titles and Deeds - GR No. 127060Maya Sin-ot ApaliasNo ratings yet
- Congental Abdominal Wall DefectsDocument38 pagesCongental Abdominal Wall DefectsAhmad Abu KushNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Radiography Safety ProcedureDocument9 pagesRadiography Safety ProcedureأحمدآلزهوNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Visual Rhetoric Music Video Comparison Essay - Abby MckellopDocument5 pagesVisual Rhetoric Music Video Comparison Essay - Abby Mckellopapi-597591424No ratings yet
- Binding of IsaacDocument10 pagesBinding of IsaacBraz SouzaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Marketing Plan For Paraiso Islet ResortDocument25 pagesMarketing Plan For Paraiso Islet ResortEllaine Claire Lor100% (1)
- Million-Day Gregorian-Julian Calendar - NotesDocument10 pagesMillion-Day Gregorian-Julian Calendar - Notesraywood100% (1)
- 115 FinargDocument294 pages115 FinargMelvin GrijalbaNo ratings yet
- Scribe FormDocument2 pagesScribe FormsiddharthgamreNo ratings yet
- Measure For Measure AngeloDocument1 pageMeasure For Measure AngeloRoger Knight100% (1)
- Task Basis JurisprudenceDocument10 pagesTask Basis JurisprudenceKerwin LeonidaNo ratings yet
- Tamil Ilakkanam Books For TNPSCDocument113 pagesTamil Ilakkanam Books For TNPSCkk_kamalakkannan100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Managing Ambiguity and ChangeDocument7 pagesManaging Ambiguity and ChangeTracey FeboNo ratings yet
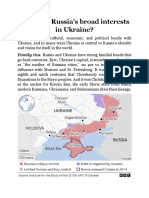
- What Are RussiaDocument3 pagesWhat Are RussiaMuhammad SufyanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)