Name Standard Price Option Code See Page
NM
FB
SB
A-33
A-26
A-36
Reversed-home
Flange bracket
Shaft bracket
Special Lengths
Type Standard Price Cable Symbol
Standard Type
(Robot Cables)
P (1m)
S (3m)
M (5m)
X06 (6m) X10 (10m)
X11 (11m) X15 (15m)
X16 (16m) X20 (20m)
* The standard cable is the motor-encoder integrated robot cable.
* See page A-39 for cables for maintenance.
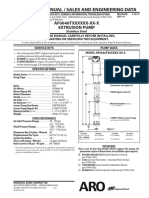
Gripping Force Adjustment
The gripping (pushing) force can be adjusted freely
within the range of current limits of 20% to 70%.
* The gripping forces in the following diagrams
indicate the sum of the gripping forces of both
fingers.
0
0 10 20
Current Limit (% ratio)
30 40 50 60 70
2
4
6
8
10
12
14
16
G
r
i
p
p
i
n
g
f
o
r
c
e
(
N
)
Stroke List 2 Cable List
3 Option List Actuator Specifications
Description Item
Worm gear + helical gear + helical rack
0.01mm
0.2mm or less per side (constantly pressed out by a spring)
0.05mm or less per side
Linear guide
Ma: 0.5Nm Mb: 0.5Nm Mc: 1.5Nm
0.2kg
Class 10 (0.1m)
040C, 85% RH or less (non-condensing)
Drive System
Positioning Repeatability
Backlash
Lost Motion
Guide
Allowable Static Load Moment
Weight
Cleanliness
Ambient Operating Temp./Humidity
RCP2CR-GRSS
Cleanroom ROBO Cylinder 2-Finger Gripper Mini Slider Type 42mm Width
Pulse motor
* See page Pre-35 for an explanation of the naming convention.
20P: Pulse motor
20 size
I: Incremental
* The simple absolute
encoder is also
considered type "I".
P1: PCON
RPCON
PSEL
P3: PMEC
PSEP
N : None
P : 1m
S : 3m
M : 5m
X : Custom
NM : Reversed-home
FB : Flange bracket
SB : Shaft bracket
8: 8mm
(4mm per side)
30 : 1/30
deceleration
ratio
Configuration:
RCP2CR
GRSS I 20P 30 8
Series Type Encoder Motor Deceleration Ratio Stroke Compatible Controllers Cable Length Option
Legend:
1
Compatible controllers
2
Cable length
3
Options
(Unit: mm/s)
Actuator Specifications
Lead and Load Capacity Stroke, Max. Opening/Closing Speed, and Suction Volume
(1) The maximum opening/closing speed indicates the operating speed on one side. The relative operating speed is twice this value.
(2) The maximum gripping force is the sum of the gripping forces of both fingers, at a gripping point distance of 0mm and no overhang
distance. The workpiece weight that can be actually moved depends on the friction coefficient between the gripper fingers and the
workpiece, as well as on the shape of the workpiece. As a rough guide, a workpiece's weight should not exceed 1/10 to 1/20 of the
gripping force. (See page A-74 for details.)
(3) The rated acceleration while moving is 0.3G.
P
O
I N
T
Notes on
Selection
Deceleration
Ratio
30 14
Max. Gripping
Force (N)
Model
Stroke
(mm)
RCP2CR-GRSS-I-20P-30-8- 1 - 2 - 3
8
(4 per side)
Stroke
Deceleration Ratio
8
(mm)
Suction Volume
(Nl/min)
78 10 30
8
P. A-5
Technical
References
* Please note that, when gripping (pushing),
the speed is fixed at 5mm/s.
Stroke (mm) Standard Price
411 RCP2CR-GRSS
RCP2CR ROBO Cylinder
Mini
Mini
PSEP
/ASEP
PMEC
/AMEC
ROBO
NET
ERC2
PCON
ACON
SCON
PSEL
ASEL
SSEL
XSEL
Standard
Mini
Standard
Standard
Controllers
Integrated
Controllers
Integrated
Rod
Type
Table/Arm
/Flat Type
Gripper/
Rotary Type
Linear Servo
Type
Cleanroom
Type
Splash-Proof
Controllers
Pulse Motor
Servo Motor
(24V)
Servo Motor
(200V)
Linear
Servo Motor
Slider
Type
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
Sold & Serviced By:
For Special Orders P. A-9
1
1
0
-
0
.0
5
94
M
A
X
2
2
M
I
N
1
4
4
6
17
8.5
2-3
+0. 05
0 depth 3
(same for opposite side)
3
4
4
4
3
+0. 05
0 depth 3
8-M3 depth 5
(same for opposite side)
4-M3 depth 5
2-3
Air intake port (applicable tube
outer diameter 4)
+0. 03
0 depth 3
(same for opposite side)
3
+0. 03
0 depth 3
4
2
36
3
3
17
8.5
4
3
+0. 05
0 depth 3
4-M3 depth 5
3
+0. 03
0 depth 3
2
4
30
5
4
9
61.5
2.5 6 57.5
22-M3
(same for opposite side)
3
5
1
7
S
e
c
u
r
e
a
t
le
a
s
t
1
0
0
Cable joint
connector*1
Dimensions
* The opening side of the slider is the home position.
* 1 The motor-encoder cable is connected here. See page A-39 for details on cables.
Weight (kg) 0.2
1 Compatible Controllers
The RCP2CR series actuators can operate with the controllers below. Select the controller according to your usage.
Name External View Model Description Max. Positioning Points Input Voltage Power Supply Capacity Standard Price See Page
Solenoid Valve Type
PMEC-C-20PI-NP-2-1 Easy-to-use controller, even for beginners
3 points
AC100V
AC200V
See P481 P477
PSEP-C-20PI-NP-2-0
Operable with same signal as solenoid valve.
Supports both single and double solenoid types.
No homing necessary with simple absolute type.
DC24V 2A max.
P487
Splash-Proof
Solenoid Valve Type
PSEP-CW-20PI-NP-2-0
Positioner Type PCON-C-20PI-NP-2-0
Positioning is possible for up to 512 points 512 points
P525
Safety-Compliant
Positioner Type
PCON-CG-20PI-NP-2-0
Pulse Train Input Type
(Differential Line Driver)
PCON-PL-20PI-NP-2-0
Pulse train input type with
differential line driver support
()
Pulse Train Input Type
(Open Collector)
PCON-PO-20PI-NP-2-0
Pulse train input type with
open collector support
Serial
Communication Type
PCON-SE-20PI-N-0-0 Dedicated to serial communication 64 points
Field Network Type RPCON-20P Dedicated to field network 768 points P503
Program Control
Type
PSEL-C-1-20PI-NP-2-0
Programmed operation is possible
Operation is possible on up to 2 axes
1500 points P557
* This is for the single-axis PSEL.
* 1 is a placeholder for the power supply voltage (1: 100V, 2: 100240V).
RCP2CR-GRSS 412
RCP2CR ROBO Cylinder
Mini
Mini
PSEP
/ASEP
PMEC
/AMEC
ROBO
NET
ERC2
PCON
ACON
SCON
PSEL
ASEL
SSEL
XSEL
Standard
Mini
Standard
Standard
Controllers
Integrated
Controllers
Integrated
Slider
Type
Rod
Type
Table/Arm
/Flat Type
Gripper/
Rotary Type
Linear Servo
Type
Cleanroom
Type
Splash-Proof
Controllers
Pulse Motor
Servo Motor
(24V)
Servo Motor
(200V)
Linear
Servo Motor
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
Sold & Serviced By:
You might also like
- IAI 05 RC General CJ0203-2A P371-416 GripperDocument46 pagesIAI 05 RC General CJ0203-2A P371-416 GripperElectromateNo ratings yet
- Iai Rca Ss5d SpecsheetDocument2 pagesIai Rca Ss5d SpecsheetElectromateNo ratings yet
- Iai Rca Sa4c SpecsheetDocument2 pagesIai Rca Sa4c SpecsheetElectromateNo ratings yet
- IAI DD - Motor - CJ0199-1A-UST-1-1013Document8 pagesIAI DD - Motor - CJ0199-1A-UST-1-1013ElectromateNo ratings yet
- Micro Precision Positioning Table IKODocument8 pagesMicro Precision Positioning Table IKOhexapodo2No ratings yet
- RCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeDocument8 pagesRCS3-CT8C/CTZ5C: ROBO Cylinder High-Speed TypeElectromateNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogElectromateNo ratings yet
- I18E en 02+XtraDrive+DatasheetDocument14 pagesI18E en 02+XtraDrive+DatasheetDejan PauljeskovicNo ratings yet
- IAI LSAS N10 N15 SpecsheetDocument15 pagesIAI LSAS N10 N15 SpecsheetElectromateNo ratings yet
- Motor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacityDocument6 pagesMotor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacitynvkjayanthNo ratings yet
- IAI Direct Drive Motor SpecsheetDocument7 pagesIAI Direct Drive Motor SpecsheetElectromateNo ratings yet
- Instruction and Service Manual Adjustable Frequency Crane ControlDocument9 pagesInstruction and Service Manual Adjustable Frequency Crane ControlJoss Maykol Mundaca VasquezNo ratings yet
- U01471 - 6.125-MS1366Document1 pageU01471 - 6.125-MS1366deepblue07No ratings yet
- SMC MPC Multi Position Cylinder RodDocument14 pagesSMC MPC Multi Position Cylinder RodNut KhaopatumthipNo ratings yet
- LVC Pricelist Wef 1st July 2014Document104 pagesLVC Pricelist Wef 1st July 2014manoj031No ratings yet
- Smartstep 2 Servo Motors: @, R88M-Gp@Document6 pagesSmartstep 2 Servo Motors: @, R88M-Gp@HammadMehmoodNo ratings yet
- Minas A DriverDocument14 pagesMinas A DriverPham Long100% (1)
- DLM142EDocument28 pagesDLM142Eseaqu3stNo ratings yet
- Datasheet Panasonic Msma042Document39 pagesDatasheet Panasonic Msma042thiagofininhoNo ratings yet
- Program Controller For RCP3/RCP2 Series: List of ModelsDocument10 pagesProgram Controller For RCP3/RCP2 Series: List of ModelsElectromateNo ratings yet
- HMC 045Document12 pagesHMC 045Mohamed ElmakkyNo ratings yet
- IAI ERC2 Controller SpecsheetDocument10 pagesIAI ERC2 Controller SpecsheetElectromateNo ratings yet
- Torque Systems Bnr3000 SpecsheetDocument4 pagesTorque Systems Bnr3000 SpecsheetElectromateNo ratings yet
- Electrovalva SMC - Eng 3 - 1 - 2 - 1 - SY3000-5000-7000-9000Document234 pagesElectrovalva SMC - Eng 3 - 1 - 2 - 1 - SY3000-5000-7000-9000Canea Mihai CaiusNo ratings yet
- Trz03te Prospekt GBDocument4 pagesTrz03te Prospekt GBMohamed El MaadawyNo ratings yet
- 415 Hitachi Hoist SH FH Monorail TrolleyDocument24 pages415 Hitachi Hoist SH FH Monorail TrolleyPhillip FrencilloNo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogElectromateNo ratings yet
- DMA Act For DMK - DMLDocument8 pagesDMA Act For DMK - DMLVlad Stefan CristianNo ratings yet
- Series: Cylinder With LockDocument24 pagesSeries: Cylinder With Lockmartc35No ratings yet
- IAI PCON Controller SpecsheetDocument10 pagesIAI PCON Controller SpecsheetElectromateNo ratings yet
- TM100-1 Product Specification Dec79Document19 pagesTM100-1 Product Specification Dec79kgrhoadsNo ratings yet
- Nippon Pulse: Your Partner in Motion ControlDocument2 pagesNippon Pulse: Your Partner in Motion ControlElectromateNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- Flow Meters, Flow Switches and Flow Transmitters: A Medium Vane-Style For Corrosive FluidsDocument6 pagesFlow Meters, Flow Switches and Flow Transmitters: A Medium Vane-Style For Corrosive FluidsSIPNETNo ratings yet
- Price Schedule - Low Voltage ComponentsDocument104 pagesPrice Schedule - Low Voltage ComponentsLuka YannamNo ratings yet
- 3-Phase Stepping Motor VRDM 39x: Document: 100000116 Edition: d013, 2005.02Document15 pages3-Phase Stepping Motor VRDM 39x: Document: 100000116 Edition: d013, 2005.02TRAN TANNo ratings yet
- 5step e dp1Document16 pages5step e dp1maatu1980No ratings yet
- Manual Motores Do Ferro Velho SanyoDocument64 pagesManual Motores Do Ferro Velho SanyoanclamixNo ratings yet
- Lo-Cog DC Servo Motors: Series 8000Document20 pagesLo-Cog DC Servo Motors: Series 8000papaandiNo ratings yet
- Tacho GeneratorDocument4 pagesTacho Generatorfausto_tapia4067No ratings yet
- 177232D1Document6 pages177232D1Muhammad Usman SindhuNo ratings yet
- Daewoo Manuals 1021Document39 pagesDaewoo Manuals 1021Erkan özdenNo ratings yet
- Belimo - Overview Air enDocument28 pagesBelimo - Overview Air enAna RuxandraNo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogServo2GoNo ratings yet
- Iai Psel C Abu SpecsheetDocument2 pagesIai Psel C Abu SpecsheetElectromateNo ratings yet
- SH E096qDocument24 pagesSH E096qkanstopthankNo ratings yet
- Mitsubishi Manuals 1053Document188 pagesMitsubishi Manuals 1053mrtansNo ratings yet
- Linear Motion Slide Toothed Belt DriveDocument20 pagesLinear Motion Slide Toothed Belt DrivePetar HosticNo ratings yet
- Actuator LiniarDocument8 pagesActuator LiniarMadalina AtitieneiNo ratings yet
- Damper Selection GuideDocument12 pagesDamper Selection GuideSathishNo ratings yet
- D31!37!39x21a Testing & Adjusting Procedure (WM)Document6 pagesD31!37!39x21a Testing & Adjusting Procedure (WM)words2zhigang_612545100% (1)
- IAI 02 RC General CJ0203-2A P001-144 SliderDocument144 pagesIAI 02 RC General CJ0203-2A P001-144 SliderElectromateNo ratings yet
- Operator'S Manual / Sales and Engineering Data: AF0646TXXXXXX-XX-X Extrusion PumpDocument4 pagesOperator'S Manual / Sales and Engineering Data: AF0646TXXXXXX-XX-X Extrusion PumpSaul PerezNo ratings yet
- USDigital SM23 Data 5pDocument5 pagesUSDigital SM23 Data 5pHayk MartirosianNo ratings yet
- Intelligent Braking System Literature ReviewDocument39 pagesIntelligent Braking System Literature ReviewRaj WagdariNo ratings yet
- METALMECDocument20 pagesMETALMECClayton PedroNo ratings yet
- N 7808 eDocument4 pagesN 7808 eEhab SaadNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Introducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionDocument1 pageIntroducing The New VLM-60 Absolute Multi-Turn Encoder From Netzer PrecisionElectromateNo ratings yet
- Galil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesDocument1 pageGalil Achieves Prestigious UL-CSA Certification For Its Motion Controller SeriesElectromateNo ratings yet
- Exor X5 Wireless Press ReleaseDocument1 pageExor X5 Wireless Press ReleaseElectromateNo ratings yet
- Electromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseDocument1 pageElectromate Announces Pre-Order Availability of Universal Robots New UR30 Cobot Press ReleaseElectromateNo ratings yet
- Electromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaDocument1 pageElectromate Partners With Spin Robotics To Offer Cobot Screwdriving Solutions in CanadaElectromateNo ratings yet
- Electromate Recertified As A Great Place To Work' Press ReleaseDocument1 pageElectromate Recertified As A Great Place To Work' Press ReleaseElectromateNo ratings yet
- New High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesDocument2 pagesNew High-Performance Hollow Shaft Gear Unit From Harmonic Drive: The HPF SeriesElectromateNo ratings yet
- ADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesDocument2 pagesADVANCED Motion Controls Releases 60A Continuous Micro-Sized FlexPro Servo DrivesElectromateNo ratings yet
- New LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsDocument1 pageNew LDL25 Series Linear Actuator From SMAC Moving Coil ActuatorsElectromateNo ratings yet
- Mecademic Robotics Releases New Firmware For Its Meca500 RobotDocument2 pagesMecademic Robotics Releases New Firmware For Its Meca500 RobotElectromateNo ratings yet
- ADVANCED Motion Controls Introduces The FM-series FlexPro™ Digital Servo DrivesDocument2 pagesADVANCED Motion Controls Introduces The FM-series FlexPro™ Digital Servo DrivesElectromateNo ratings yet
- AMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMDocument2 pagesAMC Release New Micro-Sized FlexPro Servo Drive Model FM060-60C-CMElectromateNo ratings yet
- Harmonic Drive Releases New CSF-ULW Ultra-Light Weight GearheadDocument1 pageHarmonic Drive Releases New CSF-ULW Ultra-Light Weight GearheadElectromateNo ratings yet
- Harmonic Drive Releases New CSF-ULW Ultra-Light Weight GearheadDocument1 pageHarmonic Drive Releases New CSF-ULW Ultra-Light Weight GearheadElectromateNo ratings yet
- New Large, Hollow-Shaft Gear Unit From Harmonic Drive LLCDocument1 pageNew Large, Hollow-Shaft Gear Unit From Harmonic Drive LLCElectromateNo ratings yet
- Complete Guided Wheel Motion Solutions From BWC New Product Press ReleaseDocument2 pagesComplete Guided Wheel Motion Solutions From BWC New Product Press ReleaseElectromateNo ratings yet
- Electric Actuator - Rotork - For DeNox - BOFA, SOFA, OFADocument2 pagesElectric Actuator - Rotork - For DeNox - BOFA, SOFA, OFAA.YOGAGURUNo ratings yet
- HomeSkills Wiring Fix Your Own Lights EtcDocument131 pagesHomeSkills Wiring Fix Your Own Lights EtcMark Latter100% (15)
- Embedded Systems With IotDocument6 pagesEmbedded Systems With IotRizvin RifatNo ratings yet
- Updates To ANSI-EASA AR100 2015 0Document3 pagesUpdates To ANSI-EASA AR100 2015 0VILLANUEVA_DANIEL2064No ratings yet
- Principles of Communications: Meixia TaoDocument76 pagesPrinciples of Communications: Meixia TaoGowthamUcekNo ratings yet
- Aerial Catalog 2 - 8 Alumoweld PDFDocument1 pageAerial Catalog 2 - 8 Alumoweld PDFsb_al20No ratings yet
- HP LCD VS17XDocument59 pagesHP LCD VS17XMahmoud Digital-DigitalNo ratings yet
- Astatic Catalog 197Document22 pagesAstatic Catalog 197waldoNo ratings yet
- Parts Catalog: Revision 1Document269 pagesParts Catalog: Revision 1Yesenia GonzalezNo ratings yet
- Ficha Tecnica Generador Leroy Somer Tal047aDocument12 pagesFicha Tecnica Generador Leroy Somer Tal047aRoderick SilvaNo ratings yet
- Fcu Method StatementDocument3 pagesFcu Method StatementBalajiNo ratings yet
- Pulser Guide: Supported Pulsers & WiringDocument20 pagesPulser Guide: Supported Pulsers & WiringBac Pham DinhNo ratings yet
- Fault Identification System For Electric Power Transmission Lines Using Artificial Neural NetworksDocument8 pagesFault Identification System For Electric Power Transmission Lines Using Artificial Neural NetworksPeter MbamaluikemNo ratings yet
- GB-Statys 100A Rack-Operating ManualDocument41 pagesGB-Statys 100A Rack-Operating Manualxuyen tranNo ratings yet
- Service Manual: KV-25FS12 KV-25FS12CDocument108 pagesService Manual: KV-25FS12 KV-25FS12CCesar Augusto Camargo MejiaNo ratings yet
- Power System - Ii Lab Manual (EE-328) Vi Semester Electrical EngineeringDocument22 pagesPower System - Ii Lab Manual (EE-328) Vi Semester Electrical EngineeringRahul DuttaNo ratings yet
- FTTH Solutions BrochureDocument3 pagesFTTH Solutions BrochureAli VaelizadehNo ratings yet
- Afe Builtin System Catdat Da6510 76Document18 pagesAfe Builtin System Catdat Da6510 76rmsserviceNo ratings yet
- Plan and Prepare For DiagnosisDocument32 pagesPlan and Prepare For DiagnosisMark Emerson BernabeNo ratings yet
- 1 10947-TMSeries-R15 0 2 ADocument52 pages1 10947-TMSeries-R15 0 2 AJuan100% (1)
- Ad7323 PDFDocument36 pagesAd7323 PDFHugo Fabian AlanizNo ratings yet
- As-NZS 1102-102-1997 Graphical Symbols For Electrotechnical Documentation.Document46 pagesAs-NZS 1102-102-1997 Graphical Symbols For Electrotechnical Documentation.mario100% (2)
- Solar TDocument161 pagesSolar TDaniel MilosevskiNo ratings yet
- Cerberus Pyrotronics Strobes 2 4952870316 2Document2 pagesCerberus Pyrotronics Strobes 2 4952870316 2Rafael DantasNo ratings yet
- CO2 Sensor RoomDocument8 pagesCO2 Sensor RoomTrần Khắc ĐộNo ratings yet
- Alpha-I SVM AlarmCodesDocument5 pagesAlpha-I SVM AlarmCodesSait Enrique Tellez RodriguezNo ratings yet
- La 78041Document0 pagesLa 78041miltoncgNo ratings yet
- Voltage References and BiasingDocument15 pagesVoltage References and BiasingSintherNo ratings yet
- Cummins DFCC Operators Manual PCC3100 ControllerDocument62 pagesCummins DFCC Operators Manual PCC3100 ControllerkareemNo ratings yet
- MIT Radiaton Lab Series V25 Theory of ServomechanismsDocument384 pagesMIT Radiaton Lab Series V25 Theory of Servomechanismskgrhoads0% (1)