EXTREMELY LARGE SWARM ARRAY OF PICOSATS
FOR MICROWAVE / RF EARTH SENSING, RADIOMETRY,
AND MAPPING
Progress report
March 16, 2005
Research Sub Award # 07605-003-029
Ivan Bekey
Bekey Designs, Inc.
Ibekey@cox.net
(703) 978-1125
UTITLITY AND APPLICATIONS
Principal aim: support NASAs Earth Science activities
.improve the measurement and prediction of water-related phenomena
Sense and measure:
Soil moisture content
Freeze-thaw cycles
Snow accumulation levels
Flooding extent and precise geographical location
Emergency management after hurricanes and floods
Water content and temperature profile in atmosphere
Ocean salinity
Coastal salinity and river effluents
Other water-related Earth Science applications
Principal requirement:
Observe in the low microwave frequencies because they interact best with water
OBJECTIVES
SOIL MOISTURE / OCEAN SALINITY REMOTE SENSING
High resolution on the ground
High sensitivity
Rapid / frequent revisit
Flexible scan area and pattern, or continuous dwell
Coverage of nearly a hemisphere from one space system
Affordable
These objectives cannot be met by any current, programmed, or even planned systems
CAPABILITIES AND DESIREMENTS-HYDROLOGY
Soil moisture Ocean salinity
Earth science Trafficability Deep sea Coastal
Sensitivity 0.8-2.2K <1K 0.8-2.2K <1K 0.05K 0.05K 0.05K <0.1K
Resolution/spot 35 km 100-300 m 35 km < 100 m 62 km > 1 km 62 km 100 m
Revisit time 3 days 2-5 days 3 days <1 day 3-8 days Weeks 3-8 days Hours
Frequency 1.4 GHz 1.4 GHz 1.4 GHz 1.4 GHz 1.4 GHz 1.4 GHz 1.4 GHz 1.4 GHz
SMOS Desired SMOS Desired
SMOS/
Aquarius
Desired
SMOS/
Aquarius
Desired
SMOS = Soil Moisture and Ocean Salinity mission. ESA. 2007. LEO
Aquarius = Sea Surface Salinity mission. NASA. 2008. LEO
THE RADIOMETRY PROBLEM
Earth remote sensing at low microwave frequencies is best for water detection (1.4 GHz)
Current systems have spot sizes of 30-100 kilometers and revisit times of 2-5 days
It is desirable to be able to resolve features 100-300 m size, and revisit them in hours
This is not possible with current, programmed, or even planned space systems
It requires a system in GEO, driven by the coverage and revisit needs
But from GEO a 100 m spot size requires an antenna size of 100 kilometers at 1.4 GHz
Even with inflatable antenna technologies this would weigh 10
10
kilograms
A new approach is clearly needed, which is the subject of this Phase I study
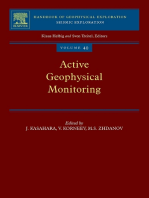
ACHIEVING 300 m GROUND RESOLUTION AT 1 GHz FROM GEO
80 km 80 km 80 km
10% sparse
inflatable
membrane
antenna
Conventional
rib-mesh
antenna
Inflatable
membrane
antenna
30 kg/sq.m 3 kg/sq.m 0.3 kg/sq.m
100,000,000,000kg 10,000,000,000 kg 1,000,000,000 kg
Comparative total weight of a hypothetical 80 km diameter antenna
THE APPROACH
Use highly sparse space-fed array
Eliminate all structure and trusses
Free-flying picosat repeaters
Receiver
No truss
No Structure
Very sparse free-flying array of very
many picosat transponders.
To Earth
INITIAL CONCEPT: LARGE PICOSAT SWARM ARRAY
MICROWAVE PASSIVE RADIOMETER
100 km tether
10,000 - 300,000 picosats
Weight 20 grams each
Total weight = 200 kg - 6,000 kg in GEO
Receivers and/or transmitters,
central computer, DGPS reference
20 g Picosat
Earth
50 cm
GEO
80 km
40 km
3 km at 100 MHz
300 m at 1 GHz
30 m at 10 GHz
Sampling scanning
Ground resolution
Pushbroom scanning
REQUIRED CONSTELLATION DIAMETER IN GEO
0.1
1.0
10.0
100.0
1,000.0
10 100 1,000 10,000
Ground resolution spot size, meters
Frequency = 1.4 GHz
DETERMINING REQUIRED NUMBER OF PICOSATS
F =
2hf
3
c
2
1
e
hf
kT
1
=1.810
19
J
m
2
sr Hz
Plancks law for thermal flux
Parameters of interest
Plancks constant h= 6.6x10
-34
Js
Boltzmans constant k=1.38x10
-23
J/K
Speed of light = 3x10
8
m/s
Temperature T=300 K
Frequency F= 1.4x10
9
Hz
Bandwidth B = 1x10
7
Hz
Integration time = 1 s
Radiating area = 300
2
/4
Capture area = d
2
/4
Distance R = 3.6x10
7
m
Steradians subtended sr = d
2
/R
2
Receiver noise P
n =
= kTB
kTB = 6.55x10
-14
Watts
Received signal P
r
2P
n
P
r
9.82x10
-23
d
2
Watts
d
2
= 8.42x10
8
a = 6.6x10
8
m
2
Individual picosat capture area = a
a = =0.0035 m
2
Equivalent total
capture area of all
picosats = a
Subtended solid
angle = sr
Total radiating area
= 300 m diameter
Constellation diameter
2
4
Distance = R
BLACK BODY RADIATION FROM THE EARTH
1E-21
1E-20
1E-19
1E-18
1E-17
1E-16
1E-15
1E-14
1E-13
1E-12
1E-11
1E-10
0.1 1.0 10.0 100.0 1,000.0 10,000.0 100,000.0
Frequency, GHz
Sweet spot for water
measurements
10
NUMBER OF PICOSATS REQUIRED-PASSIVE SYSTEM
100
1,000
10,000
100,000
1,000,000
10,000,000
100,000,000
1,000,000,000
10,000,000,000
100,000,000,000
1,000,000,000,000
10,000,000,000,000
100,000,000,000,000
10 100 1,000 10,000 100,000 1,000,000
Ground resolution spot size, meters
5 cm picosat antenna
50 cm picosat antenna
1.25 m picosat antenna
Spot size of
interest
ACTIVE ILLUMINATOR SYSTEM
PICOSAT SWARM ARRAY MICROWAVE EARTHSENSING
100 km tether
Central receiver, feed, metrology
center, navigation reference,
processor/computer, command
center, command/control,
communications with ground
Earth
GEO
100 km
100 km
Ground resolution spot = 100 meters
Flexible scan/dwell pattern
1,000 - 100,000 picosats
Constellation size = 100 km diameter
Counterweight and
navigation reference
Illuminator: 1.4 GHz CW,
large antenna
Picosats
NUMBER OF PICOSATS REQUIRED-ACTIVE SYSTEM
100
1,000
10,000
100,000
1,000,000
10,000,000
100,000,000
10 100 1,000
Ground resolution spot size, meters
Illuminator power = 100 W
Illuminator power = 1 kW
Illuminator power = 10 kW
Picosats have omnidirectional antennas
Illuminator has 20 m antenna
NUMBER OF PICOSATS REQUIRED-ACTIVE SYSTEM
100
1,000
10,000
100,000
1,000,000
10,000,000
10 100 1,000
Ground resolution spot size, meters
Illuminator power = 100 W
Illuminator power = 1 kW
Illuminator power = 10 kW
Picosats have 50 cm long Yagi antennas
Illuminator has 20 m antenna
HALO ORBITS CONSTELLATION DESIGN
Halo orbits obeying Hills equations are set up for picosats
Picosats deployed into an apparent plane in relative coordinates.
Picosats rotate around a central point in GEO
Plane is inclined 30 degrees to local horizontal
The motions of the picosats are circular around the central point at the 30 degree plane inclination
The constellation is 100 km in diameter
Its projection on the ground is an ellipse
There are 1,000 to 100,000 picosats in the constellation
Their location in the constellation is made quasi-random during deployment
The average separation between picosats is 1 km in a 10,000 picosat constellation
The required for stationkeeping is an order of magnitude less than if in non-Keplerian orbit V
FUNCTIONING OF SPACE-FED PHASED ARRAY
Reference plane
Spherical wavefronts
Incoming plane wavefronts
Added phase delays,
modulo 2
(4>56)
Added phase delays,
modulo 2
(1>2>3)
1
2
3
4
5
6
Incoming signals are in phase to and
add coherently. Final signal is sum of
individual picosat signals
20
Phase delays introduced by picosats
are calculated based on precision
position metrology relative to the
central receiver. The actual picosat
positions are not critical
Picosats
A global phase shift pattern is
superimposed on the individual
picosat shifts across the array to
focus and steer the beam
PATTERN OF SPARSE MICROWAVE ANTENNA
Width of main lobe = constellation diameter 1.22/
Amplitude of near
sidelobes reduced by
tapering the aperture
illumination
Amplitude of
far sidelobes
=1/number of
picosats
Grating lobes are suppressed
by randomizing the position of
the picosat positions
- Angle off boresight +
FOCUSING THE ANTENNA BEAM SPOT
Distance to spot is
3.6 x 10
7
m
GEO
100 km
Focusing (and scanning) is accomplished by
superimposing a phase pattern across the
entire antenna array
Focusing the beam is possible in the
near field of the antenna, within a
distance of m
2D
2
=110
11
Far field minimum spot size = 100 km
Diffraction limited near-field
spot focused to 100-300 m
PICOSAT POSITION METROLOGY
Tethered navigation reference units
Orbiting navigation
reference units
Picosats in plane
Set up a GPS-like local navigation environment: a CMS (Constellation Metrology System)
5 reference units have stable oscillators and low power (short range) transmitters
Each picosat determines its own position, and then computes its required phase delay
Accuracy will be high: no ionosphere, atmosphere, or high relative velocities (highest is 4 m/s)
Navigation chips for picosats will be cheap. (Cell phone-mandated GPS chips will cost $10-30 by end of 05)
Could use GPS cell phone chips as-is, just add shielding. Total cost will be higher
Or make new CMS chips. Will be simpler: no security coding, anti-jam, or spread spectrum needed
These new chips might cost $1,000 in lots of 10,000-100,000. But this might still be too expensive
Alternative # 1
Each picosat has a beacon. Navigation units triangulate picosat positions and send to master
Alternative # 2
Master units transmits ranging tones which are retransmitted by picosats. Master computes range
and range rate to each picosat. Three masters compute picosat positions
Alternative # 3
Same as above except that masters send ranging pulses rather than tones
PICOSAT POSITION KNOWLEDGE REQUIREMENTS
IN A SPACE-FED ARRAY
d
1
d
4
d
1
Center picosats Edge picosats
Sensitivity, m/
for 1 cm
path delay
Sensitivity, m/
for 1 cm
path delay
Normal to
plane
In-plane
0 kilometers 0.3 3.3 cm
0.00005
2
22.4 m 0.000014
2
26.4 m
d
2
d
3
d
3
d
5
d
6
3.3 cm
26 m
26 m
>100 m
22 m
22 m
Receiver
PICOSAT PHASE CONTROL
Need to control phase to about
Worst case: this is equivalent to about 1 cm at 1.4 GHz
But space-fed array increases the worst case to 3.3 cm, or
Since can go modulo 2 pi, need only control phase to 6 increments
This implies a 3 bit phase shifter. These are easy
Need to determine and set phase frequently due to 3.3 cm tolerance:
Velocity around constellation outermost diameter is 3.6 m/s relative to center
Thus phase must be adjusted every 10 ms
Command to set phase @3 bits 100 times/sec requires 3,300 bps in one channel
Set up 100 channels with 100 picosats each and command requires 3.3 kbps per channel
However the tolerances are much looser than 3.3 cm in most directions of drift
So that on average this command link will not be stressed
Furthermore, if picosats compute their own phase then command is only required to set
global phase for beam steering and focusing
This requires even lower bit rate because changes are expected very slowly
20
6
PICOSAT DEPLOYMENT, RETRIEVAL,
AND SCAVENGING CONCEPT
Picosats will deploy themselves from central unit.
Each picosat requires 8 micrograms of propellants (100 g picosat) at 3000 Isp for deployment
Picosats will return to central storage depot when nearing EOL.
Central depot holds all 10,000 picosats (1,000 kg).
Depot has doors and sensors, and internal baffles/nets
Picosats are commanded from master to deploy; and then to return to depot for storage
If a picosat dies prematurely a scavenger unit is sent to retrieve it and swallow it
The scavenger stays at the last dead picosat location until it has to go swallow another one
Returning to central location until needed again would require more propellants
This requires less propellant than to dispose of dead picosats into above-GEO disposal orbits
Scavenger can hold 1000 dead picosats (10% picosat failure rate).
Scavenger needs only about 9 kg of propellants total. Its gross weight is 300 kg
Scavenger
Transfers to dead picosat location
Has sticky foam inside
Swallows picosat
Stays at the location until needed again
Depot
Located at center of constellation.
Contains baffles in new locations and sticky
foam in old locations
Picosats fly into it under own guidance
Stores 10,000 picosats
Dead picosat
Live picosat
FIRST COVERAGE CALCULATIONS
DAILY AREA RATE AS A FUNCTION OF SENSITIVITY
10 BEAM RECEIVER
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
0.001 0.010 0.100 1.000 10.000
Sensitivity, K
1,000 m spot
316 m spot
100 m spot
Atlanta
San Fransico Bay
Cheseapeake Bay
California
United States
ESA SMOS NASA AQUARIUS
Georgia Tech
AREA COVERED AS A FUNCTION OF REVISIT TIME:
10 BEAM RECEIVER
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
0.001 0.010 0.100 1.000 10.000
Revisit time, Days
1,000 m spot
316 m spot
100 m spot
Atlanta
San Fransico Bay
Cheseapeake Bay
California
United States
Georgia tech
Soil moisture/
Water salinity
Trafficability
1 hour 1 day
1 min.
ACTIVE ILLUMINATOR SYSTEM
PICOSAT SWARM ARRAY MICROWAVE EARTHSENSING
100 km tether
Central receiver, feed, metrology
center, navigation reference,
processor/computer, command
center, command/control,
communications with ground
20-200 g satellite
Earth
2-250 cm
GEO
100 km
100 km
Ground resolution spot = 100 meters
Flexible scan/dwell pattern
1,000 - 100,000 picosats
Weight 20-200 grams each
Constellation plane tilted 30 deg to local horizontal
Constellation size = 100 km circle
Picosat locations randomized in constellation
Counterweight
and navigation
reference
Picosat antennas could be
omnidirectional stubs or
6-16 element Yagi arrays (shown)
Deployer/retriever
stationed at center
Illuminator: 1 kW CW,
20 m antenna
Navigation reference units
STATUS/SUMMARY
Initial concentration is on Earth Science hydrology missions
System sizing is nearly complete
An active illuminator system has been chosen
The resolution and coverage far exceed anything by SSIS, SMOS, Aquarius, Hydros
The choice of GEO altitude results in very flexible scanning and coverage
The concept configuration and its elements still appear viable
No showstoppers have been found to date
Its utility will be unprecedented, and likely to be welcomed by the science community
Phase I will be completed on schedule
END
MISSION/SCIENCE CONTACTS MADE TO DATE
NASA HQ
Granville Paules
John LaBreque
Craig Dobson
Eric Lindstrom
Jarred Entin
NASA GSFC
Waleed Abdalati
Edward Kim
JPL
George Hajj
Cinza Ruffada
James Zumberge
Other
Phil Schwartz--Aerospace Corporation
Numerous web sites for systems: SMOS, Aquarius, Hydros, SSIS, others
DAILY AREA RATE AS A FUNCTION OF SENSITIVITY
1 BEAM RECEIVER
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
0.001 0.010 0.100 1.000 10.000
Sensitivity, K
1,000 m spot
316 m spot
100 m spot
Atlanta
San Fransico Bay
Cheseapeake Bay
California
United States
ESA SMOS NASA AQUARIUS Georgia Tech
AREA COVERED AS A FUNCTION OF REVISIT TIM
1 BEAM RECEIVER
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
0.001 0.010 0.100 1.000 10.000
Revisit time, Days
1,000 m spot
316 m spot
100 m spot
Atlanta
San Fransico Bay
Cheseapeake Bay
California
United States
Georgia Tech
1 hour
1 day
1 min.
Soil moisture/
Water salinity
Trafficability
SPARSENESS OF SWARMED APERTUR
0.00001
0.00010
0.00100
0.01000
0.10000
1.00000
10.00000
100.00000
100 1,000 10,000 100,000
Aperture diameter, meters
% filled with 1000 picosats
% filled with 10,000 picosats
% filled with 100,000 picosats
Picosats in space-fed array
Operate as repeaters
Frequency = 1 GHz
Each has 10 dB antenna
CHOICE OF CONSTELLATION ALTITUDE
PRO CON
LEO
MEO
GEO
Revisit time OK
Constellation size small--1 km
One constellation suffices--global coverage
Few picosats required in constellation
Passive system OK
Large V in picosats for stationkeeping
High orbital debris creation problem
High impact probable with other
satellites
Very long revisit time
Medium size constellation
Need many constellations
Must use active system
Orbital debris not a problem
Medium size constellation
Medium number of picosats needed
Short and flexible revisit time
Flexible scan/dwell patterns/options
Picosats can use omni small antennas
One constellation covers a hemisphere
Orbital debris problem moderate
Large constellation size
Active system required
Many picosats required
You might also like
- LG Split Type Air Conditioner Complete Service ManualDocument74 pagesLG Split Type Air Conditioner Complete Service ManualArt Del R Salonga85% (75)
- Wave HeightDocument27 pagesWave HeightNilesh DalviNo ratings yet
- Radio Comm & SatelliteCommDocument48 pagesRadio Comm & SatelliteCommKarl MengNo ratings yet
- ANSI C84.1 Table 1 - System Voltage RangesDocument2 pagesANSI C84.1 Table 1 - System Voltage Rangesangel vivasNo ratings yet
- Sonar 2008Document60 pagesSonar 2008sreesree123100% (1)
- Uo 876 KfvuiteyhrtyhryujyujuDocument84 pagesUo 876 KfvuiteyhrtyhryujyujurubbbitsNo ratings yet
- MW Basic Knowledge: - MicrowaveDocument21 pagesMW Basic Knowledge: - MicrowaverubbbitsNo ratings yet
- Day2 1400 1500 Introduction On Satellite Monitoring LuoChaoDocument65 pagesDay2 1400 1500 Introduction On Satellite Monitoring LuoChaoKawthar TouzaniNo ratings yet
- Global Environmental MEMS Sensors (GEMS) : Revolutionary Observing Technology For The 21st CenturyDocument24 pagesGlobal Environmental MEMS Sensors (GEMS) : Revolutionary Observing Technology For The 21st CenturyClifford StoneNo ratings yet
- LOS MicrowaveDocument101 pagesLOS MicrowaveJAwad HAmeedNo ratings yet
- Chap 7Document7 pagesChap 7Tanvin AyatNo ratings yet
- Satellite CommunicationDocument63 pagesSatellite CommunicationMinh Trung LươngNo ratings yet
- Presentation On Satellite CommunicationDocument19 pagesPresentation On Satellite Communicationalex sisayNo ratings yet
- Point To PointmicrowaveDocument83 pagesPoint To PointmicrowavesomcableNo ratings yet
- Ground Penetrating Radar (GPR) : Dr. Ghulam Mohyuddin SohailDocument64 pagesGround Penetrating Radar (GPR) : Dr. Ghulam Mohyuddin SohailMuazNo ratings yet
- Basics of TransmissionDocument41 pagesBasics of TransmissionRishel PuriNo ratings yet
- Frequencies For Communication: Frequency and Wave LengthDocument109 pagesFrequencies For Communication: Frequency and Wave LengthbibingeorgeNo ratings yet
- RTN 910/950 Dimmensioning: IntroducingDocument94 pagesRTN 910/950 Dimmensioning: IntroducingGaddy GumbaoNo ratings yet
- Group 5 Wireless OowerDocument84 pagesGroup 5 Wireless Oowerbalaeee123No ratings yet
- Remote Sensing Exam 2 Study Guide: ResolutionDocument10 pagesRemote Sensing Exam 2 Study Guide: Resolutionaqzeeshan78No ratings yet
- Satellite SignalsDocument40 pagesSatellite SignalsSourav SatpathyNo ratings yet
- Point To Point Microwave TransmissionDocument83 pagesPoint To Point Microwave Transmissionfatmirz9448No ratings yet
- 1Document7 pages1Laurien BudayNo ratings yet
- f1 Part 2Document25 pagesf1 Part 2ocean trotter worldwide100% (1)
- The Atacama Large Millimeter Array (Alma) A Next Generation Radio TelescopeDocument4 pagesThe Atacama Large Millimeter Array (Alma) A Next Generation Radio TelescopethanhNo ratings yet
- Propagation - Large Scale FadingDocument55 pagesPropagation - Large Scale FadingJermaine MccartyNo ratings yet
- Microwave Communications2Document140 pagesMicrowave Communications2rezaNo ratings yet
- (Adrián-Martínez) - A Compact Acoustic Calibrator For Ultra-High Energy Neutrino DetectionDocument5 pages(Adrián-Martínez) - A Compact Acoustic Calibrator For Ultra-High Energy Neutrino DetectionTienda del ChavoNo ratings yet
- Lecture9 - GROUND PENETRATING RADARDocument55 pagesLecture9 - GROUND PENETRATING RADARMuhamadSadiqNo ratings yet
- Deep Water Floater Concepts For Offshore Wind Turbines. Design, Modeling and TestingDocument26 pagesDeep Water Floater Concepts For Offshore Wind Turbines. Design, Modeling and Testingskumar_293596No ratings yet
- Chapter 5 Remote SensingDocument12 pagesChapter 5 Remote SensingHarsh SharmaNo ratings yet
- CBSE Physics (Chapter Wise With Hint / Solution) Class XII: Communications Systems KeyDocument3 pagesCBSE Physics (Chapter Wise With Hint / Solution) Class XII: Communications Systems KeySubhojyotiDasNo ratings yet
- Wireless Power Transmission: Department of Electronics&Communication Engineering Psit College of EngineeringDocument34 pagesWireless Power Transmission: Department of Electronics&Communication Engineering Psit College of Engineeringsaqlain khanNo ratings yet
- Landmine Detection Using Impulse Ground Penetrating Radar Seminar ReportDocument24 pagesLandmine Detection Using Impulse Ground Penetrating Radar Seminar ReportthejasgvNo ratings yet
- Point To Point Microwave PDFDocument83 pagesPoint To Point Microwave PDFpr3m4n100% (1)
- Mediciones en AntenasDocument28 pagesMediciones en AntenasJose FerreiraNo ratings yet
- Acoustic MethodDocument21 pagesAcoustic MethodMohd Akmal RazakNo ratings yet
- Geodesia Fisica Physical Geodesy From SaDocument35 pagesGeodesia Fisica Physical Geodesy From SaEndashaw DebruNo ratings yet
- Chapter 2 - 22mobile Radio Propagation Channel (ECEg5307)Document79 pagesChapter 2 - 22mobile Radio Propagation Channel (ECEg5307)nesredinshussen36No ratings yet
- Satellite Communication - IntroductionDocument102 pagesSatellite Communication - Introductionsusan williamNo ratings yet
- Point To Point MicrowaveDocument81 pagesPoint To Point MicrowaveRicha BudhirajaNo ratings yet
- MW FundamentalsDocument22 pagesMW FundamentalsPankaj Choudhary100% (1)
- Audio-Band Frequency-Dependent Squeezing For Gravitational-Wave DetectorsDocument7 pagesAudio-Band Frequency-Dependent Squeezing For Gravitational-Wave DetectorsSasa TopicNo ratings yet
- GPS ErrorDocument13 pagesGPS ErrorEdi Unusic0% (1)
- End SemDocument2 pagesEnd SemBorn MaDNo ratings yet
- 457 KHZ Electromagnetism and The Future of Avalanche Transceivers John Hereford Bruce EdgerlyDocument6 pages457 KHZ Electromagnetism and The Future of Avalanche Transceivers John Hereford Bruce EdgerlysogeekNo ratings yet
- Landmine Detection Using Impulse Ground Penetrating RadarDocument24 pagesLandmine Detection Using Impulse Ground Penetrating RadarantonypkNo ratings yet
- 18 Satellite PDFDocument28 pages18 Satellite PDFsweety_1No ratings yet
- Space Based Solar PowerDocument26 pagesSpace Based Solar PowerArun Gopinath0% (1)
- Landmine Detection: S C O E & T - , D O EDocument14 pagesLandmine Detection: S C O E & T - , D O EMuhammad ShahidNo ratings yet
- Lecture 1 - Microwave SystemsDocument53 pagesLecture 1 - Microwave SystemsAbdul SuboorNo ratings yet
- Coverage MappingDocument17 pagesCoverage MappingDinaNo ratings yet
- Tugas 2 Hidrografi (Hydro Acoustic)Document6 pagesTugas 2 Hidrografi (Hydro Acoustic)Rizal FirmansyahNo ratings yet
- Komdat Pertemuan-02 Media Komunikasi DataDocument10 pagesKomdat Pertemuan-02 Media Komunikasi DataZulfa RangkutiNo ratings yet
- Exploration and Monitoring of the Continental Shelf Underwater EnvironmentFrom EverandExploration and Monitoring of the Continental Shelf Underwater EnvironmentNo ratings yet
- Time Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsFrom EverandTime Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Shield PDFDocument26 pagesShield PDFClifford StoneNo ratings yet
- Smith Memo Nov., 21, 1950 PDFDocument3 pagesSmith Memo Nov., 21, 1950 PDFClifford StoneNo ratings yet
- Global Constellation of Stratospheric Scientific PlatformsDocument49 pagesGlobal Constellation of Stratospheric Scientific PlatformsClifford StoneNo ratings yet
- Propagating Magnetic Wave Accelerator (PMWAC) For Manned Deep Space MissionsDocument19 pagesPropagating Magnetic Wave Accelerator (PMWAC) For Manned Deep Space MissionsClifford StoneNo ratings yet
- Wind Driven Power Generation On Titan Windmills - : in Space!Document16 pagesWind Driven Power Generation On Titan Windmills - : in Space!Clifford StoneNo ratings yet
- An Architecture For Self-Replicating Lunar FactoriesDocument28 pagesAn Architecture For Self-Replicating Lunar FactoriesClifford StoneNo ratings yet
- Autonomous Self-Extending Machines For Accelerating Space ExplorationDocument25 pagesAutonomous Self-Extending Machines For Accelerating Space ExplorationClifford StoneNo ratings yet
- Roswell PDFDocument993 pagesRoswell PDFClifford StoneNo ratings yet
- Bridging The Funding Gap: Bob Scaringe PresidentDocument8 pagesBridging The Funding Gap: Bob Scaringe PresidentClifford StoneNo ratings yet
- Sailbeam: Space Propulsion by Macroscopic Sail-Type ProjectilesDocument34 pagesSailbeam: Space Propulsion by Macroscopic Sail-Type ProjectilesClifford StoneNo ratings yet
- SearchForLifeOnEuropa PDFDocument16 pagesSearchForLifeOnEuropa PDFClifford StoneNo ratings yet
- Magnetic AmplifierDocument4 pagesMagnetic AmplifierShobha SainiNo ratings yet
- PID Based Temperature Control of A Plant Heat Exchanger System-239Document5 pagesPID Based Temperature Control of A Plant Heat Exchanger System-239Mark Anthony CaroNo ratings yet
- Topic: Photoelectric Effect: Noble International SchoolDocument22 pagesTopic: Photoelectric Effect: Noble International SchoolAnmol SinghalNo ratings yet
- CH - 8 (Bode Plot) PD SolDocument28 pagesCH - 8 (Bode Plot) PD SolAnant SinhaNo ratings yet
- Thermistor 20KDocument2 pagesThermistor 20KBreinhard Septian Siahaan100% (1)
- Expansion Units: SpecificationsDocument3 pagesExpansion Units: Specificationsghita_gabriel100% (1)
- Hyundai Robot Hi5 Controller Operation ManualDocument463 pagesHyundai Robot Hi5 Controller Operation ManualVoxine Ouscularen0% (1)
- 0 - BME-OCW For Physics II For Biomedical EngineeringDocument149 pages0 - BME-OCW For Physics II For Biomedical EngineeringAjahar Ali MiahNo ratings yet
- BJ - Cable Type - EN - TCD210042AA - CATALOG - WDocument2 pagesBJ - Cable Type - EN - TCD210042AA - CATALOG - WJORGE RODNo ratings yet
- Intermusic - Synth Programming - 2Document2 pagesIntermusic - Synth Programming - 2vioguitar100% (1)
- Models - Acdc.helmholtz CoilDocument14 pagesModels - Acdc.helmholtz CoilAlvaro RivasNo ratings yet
- 070-0470-02 Rev EDocument120 pages070-0470-02 Rev ERama Tenis CopecNo ratings yet
- Janitza Manual UMG511 508 605 604 BACnet PICS enDocument4 pagesJanitza Manual UMG511 508 605 604 BACnet PICS enNotlim MarulandaNo ratings yet
- Update 201409Document4,062 pagesUpdate 201409NguyễnThạchNo ratings yet
- Benchmarking EV and HEV Technologies: Tim Burress Oak Ridge National LaboratoryDocument22 pagesBenchmarking EV and HEV Technologies: Tim Burress Oak Ridge National LaboratoryTanawat ThanthongNo ratings yet
- PV Curve For Voltage StabilityDocument1 pagePV Curve For Voltage Stabilityveeru_puppalaNo ratings yet
- MINI STM32 Schematic DiagramDocument2 pagesMINI STM32 Schematic DiagramNoveri Dwi Hardyanto100% (1)
- Play FormDocument74 pagesPlay FormŠejla Nurković100% (1)
- ECDX Customized EnclosuresDocument3 pagesECDX Customized EnclosuresLuis LlanosNo ratings yet
- InstallDocument2 pagesInstallambonsolehNo ratings yet
- Ghép nối qua cổng-ghép nối kênh 1. Ghép nối bộ nhớDocument139 pagesGhép nối qua cổng-ghép nối kênh 1. Ghép nối bộ nhớBùi Việt ĐứcNo ratings yet
- Release Notes AccuNestDocument58 pagesRelease Notes AccuNestDora BA50% (2)
- Basic DfwmacDocument6 pagesBasic DfwmacDinesh Kumar PNo ratings yet
- Antenna Analyzer DocsDocument8 pagesAntenna Analyzer DocshackmanNo ratings yet
- Physics AssignmentDocument9 pagesPhysics AssignmentMuhammad Hannan100% (2)
- ST Journal of Research 4.1 - Wireless Sensor NetworksDocument164 pagesST Journal of Research 4.1 - Wireless Sensor Networksclara_colombo1996No ratings yet
- IM ch04Document8 pagesIM ch04Edbert CatapangNo ratings yet
- EcDocument143 pagesEcTomas FleitasNo ratings yet