Professional Documents
Culture Documents
Tema7 MV PDF
Uploaded by
gustavojorge12Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Tema7 MV PDF
Uploaded by
gustavojorge12Copyright:
Available Formats
1/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Mecnica del Vuelo
Tema 7: Estabilidad Esttica y Control: Movimiento
Longitudinal
Damin Rivas Rivas y Sergio Esteban Roncero
Departamento de Ingeniera Aeroespacial
Escuela Tcnica Superior de Ingeniera, Universidad de Sevilla
Curso 2013-2014
Rivas & Esteban MVI
2/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
3/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
4/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introduccin - I
Estabilidad: El concepto de estabilidad se dene simplemente como la
cualidad en la que un avin tiende a regresar a la condicin de equilibrio
de forma autnoma.
Se distingue entre:
Estabilidad esttica.
Estabilidad dinmica.
Estabilidad esttica: Tendencia del avin a generar momentos
recuperadores, cuando se produce una perturbacin, que hagan que el
avin vuelva a la situacin de equilibrio de partida.
Estabilidad Esttica y Control se divide en:
Movimiento longitudinal.
Movimiento lateral-direccional.
Si las fuerzas de recuperacin son demasiado fuertes el avin
puede pasarse de sus valores iniciales y entrar en un modo
oscilatorio incontrolable
Estabilidad dinmica est presente si el movimiento dinmico del avin
regresa eventualmente a su estado original
Rivas & Esteban MVI
5/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introduccin - II
Estabilidad Esttica y Control: Movimiento longitudinal.
Tiempo
Estable, Altamente
Amortiguado
Estable, Ligeramente
Amortiguado
Estable Estticamente
Inestable Dinmicamente
Inestable Neutralmente Estable
Tiempo Tiempo
Tiempo Tiempo
esttica
d
in
m
ic
a
esttica
d
in
m
ica
esttica
d
in
m
ic
a
dinmica
esttica
e
s
t
t
ic
a
dinm
ica
Rivas & Esteban MVI
6/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introduccin - III
Estabilidad Esttica y Control: Movimiento longitudinal.
M
Estabilizador
Horizontal
Fuerza
Aerodinmica
Momento
Resultante
Rivas & Esteban MVI
7/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introduccin - IV
Por control entendemos las deexiones de las supercies de control
que generan los momentos necesarios para controlar el avin.
Hay una diferencia fundamental con lo estudiado hasta ahora:
El avin era un punto, y en las ecuaciones tenamos 3 parmetros.
Uno de ellos era la sustentacin (los otros 2 eran T y ).
No se hablaba de cmo se consegua esa sustentacin.
Las variables de control van a ser las deexiones de las supercies de control.
A esto es a lo que llamamos control (control aerodinmico).
Es un control en bucle abierto (open loop).
Nosotros no estudiaremos el control en bucle cerrado o control
automtico.
M
Rivas & Esteban MVI
8/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introduccin - V
Es interesante poner en comparacin la estabilidad esttica con la
maniobrabilidad , por que van en direcciones opuestas:
Estabilidad Esttica Baja Maniobrabilidad.
Los aviones militares , que tienen una alta maniobrabilidad, muchos de
ellos son inestables:
El vuelo es posible gracias a los sistemas de control automtico.
Hiptesis Generales:
1
Movimiento longitudinal y movimiento lateral-direccional estn
desacoplados:
Corresponde a una conguracin clsica, pero habra otras
conguraciones que no verican lo anterior.
2
Las fuerzas y momentos totales del avin que se tienen son la suma de las
fuerzas de las supercies aerodinmicas, ms las interferencias
3
Fuerzas y momentos aerodinmicos varian linealmente con las variables
aerodinmicas (, ) y de control (
e
,
a
,
r
):
f (a + x, b + y) f (a, b) +
f
x
(a, b) x +
f
y
(a, b) y +
f
x
(a, b) &
f
y
(a, b) derivadas de estabilidad.
Nos va a permitir escribir C
L
, C
M
, etc, en funcin de las variables de
control y aerodinmicas
4
No se tiene en cuenta el empuje.
Rivas & Esteban MVI
9/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Outline
1
Introduccin
2
Sustentacin Total
Sustentacin Total - Introduccin
Efectividad del Timn de Profundidad -
Sustentacin Total del Avin
Lnea de Sustentacin Nula Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
10/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - I
Se considera el conjunto ala-fuselaje.
Se considera la cola:
En la cola se aade la interferencia ala-fuselaje.
Deexin de estela:
Deexin de la estela : La corriente no incide en la misma direccin.
Variacin de la velocidad de la corriente incidente.
Rivas & Esteban MVI
11/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Efectividad del Timn de Profundidad -
Al producirse una deexin del timn de profundidad
e
:
t
1
ngulo de ataque que ve el estabilizador horizontal con
e
= 0
t
2
ngulo de ataque que ve el estabilizador horizontal con
e
> 0
Se considera que deexin del
e
hacia abajo es positivo
e
> 0
t
incrementeo de ngulo de ataque obtenido al deectar
e
Se traduce la deexin a un incremento de ngulo de ataque
t
De modo que dado un
e
t
=
e
=
t
e
suele obtenerse experimentalmente
Rivas & Esteban MVI
12/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - I
El estudio de las fuerzas y momentos es posible planteando una serie
de lnas de referencia para el conjunto ala-fuselaje
LINEA DE REFERENCIA DEL FUSELAJE
Se sealan una serie de lneas de referencia:
Lnea de fuselaje
Lnea de ala forma un ngulo incidencia con la lnea del fuselaje i
w
Lnea de cola forma un ngulo incidencia con la lnea del fuselaje i
t
Rivas & Esteban MVI
13/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - II
Se tiene entonces que:
Para
e
= 0:
t
+ =
wb
i
w
+ i
t
t
=
wb
i
w
+ i
t
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI
14/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - II
Se tiene entonces que:
Para
e
= 0:
t
=
wb
i
w
+ i
t
+
e
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI
15/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - II
Se tiene entonces que:
Para
e
= 0:
t
+ =
wb
i
w
+ i
t
t
=
wb
i
w
+ i
t
Para
e
= 0:
t
=
wb
i
w
+ i
t
+
e
Se hace un modelo lineal de la deexin de la estela:
=
0
+
wb
t
=
_
1
wb
i
w
+ i
t
0
+
e
Rivas & Esteban MVI
16/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - III
L = L
wb
+ L
t
cos D
t
sin adimensionalizar por
1
2
V
2
S
C
L
=
L
1
2
V
2
S
=
L
wb
1
2
V
2
S
+
L
t
1
2
V
2
t
S
t
V
2
t
V
2
S
t
S
cos
D
1
2
V
2
t
S
t
V
2
t
V
2
S
t
S
sin
C
L
= C
L
wb
+ C
L
t
V
2
t
V
2
S
t
S
cos C
D
t
V
2
t
V
2
S
t
S
sin
deniendo
t
=
V
2
t
V
2
C
L
= C
L
wb
+ C
L
t
t
S
t
S
cos C
D
t
t
S
t
S
sin
Aproximacin:
1, C
D
t
C
L
t
C
D
t
C
L
t
C
L
C
L
wb
+ C
L
t
t
S
t
S
Suponemos: C
L
wb
= a
wb
wb
a
wb
Pendiente de la curva de sustentacin del ala
Aqu subyace el problema aerodinmico ala, fuselaje y la interferencia
entre ambos
Suponemos: C
L
t
= a
t
t
a
t
Pendiente de la curva de sustentacin del estabilizador horizontal
En esta pendiente estara la interferencia entre la cola y el fuselaje
Rivas & Esteban MVI
17/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - IV
_
_
_
_
_
_
_
_
_
_
_
C
L
wb
= a
wb
wb
C
L
t
= a
t
t
=
_
1
wb
i
w
+ i
t
0
+
e
C
L
t
= a
t
_
wb
i
w
+ i
t
_
0
+
wb
_
+
e
_
C
L
C
L
wb
+ C
L
t
t
S
t
S
C
L
a
wb
wb
+ a
t
_
wb
i
w
+ i
t
_
0
+
wb
_
+
e
_
t
S
t
S
dene
_
_
_
_
_
_
_
_
_
_
_
_
_
C
L
0
= a
t
(i
t
i
w
0
)
t
S
t
S
C
L
= a
wb
+ a
t
t
S
t
S
_
1
_
C
L
e
= a
t
t
S
t
S
C
L
= C
L
0
+ C
L
wb
+ C
L
e
Rivas & Esteban MVI
18/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - V
Analizando la ecuacin de la sustentacin C
L
:
C
L
= C
L
0
+ C
L
wb
+ C
L
e
_
_
_
C
L
> 0
C
L
e
> 0
C
L
> 0 : A mayor ngulo de ataque,mayor sustentacin
< 1
C
L
e
> 0 : Dado que > 0 con la denicin del criterio de signos de
e
En trminos y coecientes a
wb
, a
t
,
, dependen del nmero de
Reynolds (R
e
) y del nmero de Mach (M).
Esto ser vlido hasta que se entra en prdida.
Rivas & Esteban MVI
19/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - VI
Curva de sustentacin C
L
con i
t
como parmetro (en vez de
e
).
En algunos aviones, no hay timn de profundidad, sin que se
vara la i
t
de todo el estabilizador
Rivas & Esteban MVI
20/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - VI
F-15 variacin de la i
t
de todo el estabilizador
Rivas & Esteban MVI
21/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Sustentacin Total del Avin - VII
Curva de sustentacin C
L
con
e
.
Rivas & Esteban MVI
22/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Sust Total L Total L.S.N Total
Lnea de Sustentacin Nula Total
La lnea de sustentacin nula total del avin se obtiene:
C
L
= 0 C
L
0
+ C
L
wb
|
C
L
=0
+ C
L
e
= 0
Restando las dos expresiones:
C
L
= C
L
0
+ C
L
wb
+ C
L
e
0 = C
L
0
+ C
L
wb
|
C
L
=0
+ C
L
e
_
C
L
= C
L
wb
wb
|
C
L
=0
_
Deniendo:
=
wb
wb
|
C
L
=0
Lo que implica que se miden los ngulos desde esta lnea, entonces
podemos denir:
C
L
= C
L
wb
wb
|
C
L
=0
_
C
L
= C
L
Rivas & Esteban MVI
23/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
Introduccin
Aproximaciones
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
24/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - Introduccin - I
Para obtener los momentos de cabeceo alrededor del centro de
gravedad M
CG
:
Proyectar las fuerzas en las direcciones x y z
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI
25/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - Introduccin - II
LINEA DE REFERENCIA DEL FUSELAJE
Z
wb
= L
wb
cos (
wb
i
w
) + D
wb
sin(
wb
i
w
)
X
wb
= L
wb
sin (
wb
i
w
) + D
wb
cos (
wb
i
w
)
Z
t
= L
t
cos (
t
i
t
) + D
t
sin (
t
i
t
)
X
t
= L
t
sin (
t
i
t
) + D
t
cos (
t
i
t
)
M
CG
= M
ac
wb
+ Z
wb
l
wb
+ X
wb
z
wb
+ M
ac
t
Z
t
l
t
+ X
t
z
t
Rivas & Esteban MVI
26/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - Introduccin - II
Z
wb
= L
wb
cos (
wb
i
w
) + D
wb
sin(
wb
i
w
)
X
wb
= L
wb
sin (
wb
i
w
) + D
wb
cos (
wb
i
w
)
Z
t
= L
t
cos (
t
i
t
) + D
t
sin (
t
i
t
)
X
t
= L
t
sin (
t
i
t
) + D
t
cos (
t
i
t
)
M
CG
= M
ac
wb
+ Z
wb
l
wb
+ X
wb
z
wb
+ M
ac
t
Z
t
l
t
+ X
t
z
t
Adimensionalizar por
1
2
V
2
Sc
C
M
CG
=
M
CG
1
2
V
2
Sc
=
M
ac
wb
1
2
V
2
Sc
+
Z
wb
1
2
V
2
S
l
wb
c
+
X
wb
1
2
V
2
S
z
wb
c
+
M
ac
t
1
2
V
2
t
S
t
c
t
V
2
t
S
t
V
2
S
c
t
c
Z
t
1
2
V
2
t
S
t
l
t
c
V
2
t
S
t
V
2
S
+
X
t
1
2
V
2
t
S
t
z
t
c
V
2
t
S
t
V
2
S
Resultando en la expresin general:
C
M
CG
= C
M
ac,wb
+ C
z
wb
l
wb
+ C
x
wb
z
wb
+ C
M
ac,t
t
S
t
c
t
Sc
C
z
t
l
t
t
S
t
S
+ C
x
t
z
t
t
S
t
S
Rivas & Esteban MVI
27/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - Introduccin - III
A partir de la geometra se puede denir:
LINEA DE REFERENCIA DEL FUSELAJE
_
l
wb
= X
CG
X
ac,wb
l
t
= X
ac,t
X
CG
_
_
_
_
_
_
_
_
_
l
wb
=
X
CG
c
X
ac,wb
c
=
X
CG
X
ac,wb
l
t
=
X
ac,t
c
X
CG
c
=
X
ac,t
X
CG
z
wb
=
z
wb
c
z
t
=
z
t
c
La estabilidad del avin va a depender del centro de gravedad, siendo
este un parmetro fundamental
Rivas & Esteban MVI
28/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Aproximaciones - I
aproximacin de ngulos pequeos y L
wb
D
wb
Z
wb
= L
wb
cos (
wb
i
w
) + D
wb
sin (
wb
i
w
) Z
wb
L
wb
X
wb
= L
wb
sin (
wb
i
w
) + D
wb
cos (
wb
i
w
) X
wb
L
wb
(
wb
i
w
) + D
wb
Z
t
= L
t
cos (
t
i
t
) + D
t
sin(
t
i
t
) Z
t
L
t
X
t
= L
t
sin(
t
i
t
) + D
t
cos (
t
i
t
) X
t
L
t
(
t
i
t
) + D
t
adimensionalizar
1
2
V
2
S
C
z
wb
=
Z
wb
1
2
V
2
S
C
z
wb
C
L
wb
, C
x
wb
=
X
wb
1
2
V
2
S
C
x
wb
C
L
wb
(
wb
i
w
) + C
D
wb
C
z
t
=
Z
t
1
2
V
2
t
S
t
C
z
t
C
L
t
, C
x
t
=
X
t
1
2
V
2
t
S
t
C
x
t
C
L
t
(
t
i
t
) + C
D
t
Resultando en la expresin general:
C
M
CG
= C
M
ac,wb
+ C
L
wb
l
wb
+
_
C
L
wb
(
wb
i
w
) + C
D
wb
_
z
wb
+ C
M
ac,t
t
S
t
c
t
Sc
C
L
t
l
t
t
S
t
S
+
_
C
L
t
(
t
i
t
) + C
D
t
_
z
t
t
S
t
S
Rivas & Esteban MVI
29/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Aproximaciones - II
Aproximaciones adicionales:
_
_
_
X Z
z
wb
l
wb
z
t
l
t
_
C
x
wb
z
wb
C
z
wb
l
wb
C
x
t
z
t
C
z
t
l
t
C
M
ac,t
C
M
ac,wb
C
M
CG
= C
M
ac,wb
+ C
L
wb
l
wb
C
L
t
l
t
t
S
t
S
recordando
_
_
_
_
_
C
L
wb
= a
wb
wb
C
L
t
= a
t
__
1
wb
i
w
+ i
t
0
+
e
_
C
M
CG
= C
M
0
+ C
M
wb
+ C
M
e
modelo linealizado
con
_
_
_
_
_
_
_
C
M
0
= C
M
ac,wb
a
t
(i
t
i
w
0
)
t
S
t
S
_
X
ac,t
X
CG
_
C
M
= a
wb
_
X
CG
X
ac,wb
_
a
t
_
1
t
S
t
S
_
X
ac,t
X
CG
_
C
M
e
= a
t
t
S
t
S
_
X
ac,t
X
CG
_
Rivas & Esteban MVI
30/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Aproximaciones - III
La contribucin a la sustentacin al dar un
e
es un efecto pequeo,
aunque no as ser el efecto del momento.
C
M
ndice de estabilidad esttica longitudinal
C
M
e
Potencia de control
C
M
e
< 0 por el criterio de
e
> 0 haci a abajo.
Para generar estabilidad esttica en cabeceo es necesario que para
cualquier cambio en el ngulo de ataque se generen momentos que
opongan el cambio.
Esto implica que un diseo estable viene dado por un C
M
< 0
Para una rfaga que produzca
wb
> 0
recordando C
M
CG
= C
M
0
+ C
M
wb
+ C
M
wb
> 0 M
CG
C
M
wb
y como el momento ha de ser recuperador C
M
< 0
Una vez diseado el avin, los parmetros
t
,
S
t
S
etc... son jos.
La posicin del centro de gravedad X
CG
va a ser un parmetro
fundamental
Rivas & Esteban MVI
31/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - I
Curva de momento de cabeceo C
M
con i
t
como parmetro (en vez de
e
).
Rivas & Esteban MVI
32/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - II
Curva de momento de cabeceo C
M
con
e
.
Rivas & Esteban MVI
33/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Intro Aprox
Momento de Cabeceo - III
C
M
y C
L
en funcin de
wb
para distintos valores de
e
Rivas & Esteban MVI
34/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
35/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - I
El vuelo equilibrado viene denido por la condicin en la que hay
equilibrio de fuerzas y momentos:
_
_
_
F
x
= 0
F
z
= 0
M = 0
_
_
_
L = W
T = D
M
CG
= 0
M
CG
= 0 C
M
CG
= 0 dene la relacin entre
wb
y la deexin
del timn de profundidad
e
0 = C
M
ac,wb
+ C
L
wb
_
X
CG
X
ac,wb
_
C
L
t
t
S
t
S
_
X
ac,t
X
CG
_
C
L
t
=
C
M
ac,wb
+C
L
wb
(
X
CG
X
ac,wb
)
t
S
t
S
(
X
ac,t
X
CG
)
De todo conocemos los signos excepto de C
M
ac,wb
, que lo suponemos
negativo C
M
ac,wb
< 0 ala con curvatura positiva
El trmino C
M
ac,wb
no va a ser el dominante.
Rivas & Esteban MVI
36/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - II
En Conguracin habitual:
Se puede ver que:
_
X
CG
X
ac,wb
> 0
X
ac,t
X
CG
> 0
C
L
t
=
C
M
ac,wb
+C
L
wb
(
X
CG
X
ac,wb
)
t
S
t
S
(
X
ac,t
X
CG
)
C
L
t
> 0
Lo importante es ver que el estabilizador horizontal juega un papel
fundamental en el equilibrado del avin
El trmino dominante es C
L
wb
X
CG
X
ac,wb
y es positivo por que el
centro aerodinmico del ala est por delante del CG.
Esto tiene una ventaja adicional ya que como C
L
t
> 0 la cola contribuye
a la sustentacin positivamente
L
wb
+ L
t
= W L
wb
= W L
t
< W
Hay que volar a menor ngulo de ataque, lo cual benecia a la
resistencia
Rivas & Esteban MVI
37/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - III
En esta conguracin el centro aerodinmico del ala se queda por detras del CG:
_
X
CG
X
ac,wb
< 0
X
ac,t
X
CG
> 0
C
L
t
=
C
M
ac,wb
+C
L
wb
(
X
CG
X
ac,wb
)
t
S
t
S
(
X
ac,t
X
CG
)
C
L
t
< 0
Se puede ver que C
L
t
< 0 para que haya equilibrio de momentos.
Esto es perjudicial en el sentido que
L
wb
L
t
= W L
wb
= W + L
t
> W
Se necesita mayor sustentacin que la necesaria para compensar el peso del
avin.
Ello implica volar a mayor ngulo de ataque, y por tanto se tiene ms resistencia.
Es una conguracin no adecuada desde el punto de vista de actuaciones
integrales.
Conguracin habitual en aviones militares y comerciales con mucha echa.
Rivas & Esteban MVI
38/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - IV
Para paliar esto, aparecen las conguraciones de estabilizador Cannard
C
M
CG
= C
M
ac,wb
C
L
wb
_
X
ac,wb
X
CG
_
+ C
L
c
c
S
c
S
_
X
CG
X
ac,c
_
C
M
CG
= 0
Se tiene
c
= 1 ya que la corriente no llega perturbada al Cannard:
_
X
CG
X
ac,wb
< 0
X
ac,c
X
CG
< 0
C
L
c
=
C
M
ac,wb
+C
L
wb
(
X
ac,wb
X
CG
)
c
S
c
S
(
X
CG
X
ac,c )
C
L
c
> 0
Se puede ver que C
L
c
> 0 para que haya equilibrio de momentos.
Esto permite que:
L
wb
+ L
c
= W L
wb
= W L
t
< W
Hay que volar a menor ngulo de ataque, lo cual benecia a la
resistencia.
Rivas & Esteban MVI
39/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - V
Empleando la denicin del modelo de C
M
CG
linealizado:
C
M
CG
= C
M
0
+ C
M
wb
+ C
M
e
C
M
CG
= 0 = C
M
0
+ C
M
wb
+C
M
e
(
e
)
eq
(
e
)
eq
=
C
M
0
C
M
C
M
C
M
wb
C
M
< 0
C
M
e
< 0
La pendiente es negativa
Vemos que para ngulos de ataque grandes (V pequea) (
e
)
eq
< 0
Tambin se conoce como (
e
)
eq
(
e
)
trim
Se ha visto que para la condicin de vuelo equilibrado se requiere
control
Rivas & Esteban MVI
40/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Rivas & Esteban MVI
41/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - I
Vuelo equilibrado es un ejercicio de control en el que para un
wb
e
Se supondr un vuelo horizontal rectilneo, uniforme y equilibrado.
Veremos, en esta conguracin el control londigital Posibilidad de
cambiar la velocidad de vuelo.
Este est relacionado con cambiar C
L
, y por lo tanto cambiar
wb
W = L =
1
2
V
2
SC
L
Dada V C
L
=
2W
V
2
S
Recordando:
_
C
L
= C
L
0
+ C
L
wb
+ C
L
e
C
M
CG
= C
M
0
+ C
M
wb
+ C
M
e
C
M
CG
= 0
C
L
=
2W
V
2
S
= C
L
0
+ C
L
wb
+ C
L
e
C
M
0
+ C
M
wb
+ C
M
e
= 0
_
(
wb
)
eq
(
e
)
eq
Estas 2 ecuaciones permiten, para una V dada determinar el C
L
,
determinar el
wb
y el
e
que hay que poner para equilibrar el avin.
Se puede simplicar el problema y desacoplar si se asume
C
L
e
C
L
V C
L
C
L
= C
L
0
+ C
L
wb
(
wb
)
eq
0 = C
M
0
+ C
M
wb
+ C
M
e
(
e
)
eq
Rivas & Esteban MVI
42/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - II
C
L
= C
L
0
+ C
L
wb
(
wb
)
eq
0 = C
M
0
+ C
M
wb
+ C
M
e
(
e
)
eq
El control, que es volver a equilibrar el avin cuando cambiamos
wb
, se
puede hacer de diferentes formas:
Variar
e
Variar C
M
lo ms usado es variar el centro de gravedad X
CG
Variar C
M
0
Variando la curvatura del ala: (Flaps y Slats)
Los 2 ltimos criterios de control no son los ms adecuados ya que
variar C
M
y sacar aps/slats alteran la estabilidad del avin
Variar C
M
es directamente variar la estabilidad del avin.
En los mecanismos para variar C
M
0
no se ve cmo afecta a la
estabilidad esttica del avin.
Los mecanismos de desplegado de aps/slats vara la deexin de la
estela variando por lo tanto C
M
Rivas & Esteban MVI
43/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - III
para cada V
_
C
L
= C
L
0
+ C
L
wb
(
wb
)
eq
0 = C
M
0
+ C
M
wb
+ C
M
e
e
_
(
wb
)
eq
(
e
)
eq
Con esto aparece un parmetro importante que dene la controlabilidad del
avin:
d
e
dV
Se tienen curvas
e
frente a V (V
EAS
) En todos los casos
d
e
dV
> 0.
Rivas & Esteban MVI
44/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - IV
Cando es ms controlable el avin, cuando la derivada es elevada , o cuando la
derivada es pequea?
rango
amplio
rango pequeo
Suponiendo zonas con derivada elevada, y con derivada pequea:
A V el rango de
e
es ms pequeo: se requiere un control ms no
A V , se tiene un rango de
e
ms amplio
El rango de error que permite tener la V
deseada
es mayor cuanto mayor es la
derivada.
Interesa, desde el punto de vista de controlabilidad, derivadas elevadasms
controlabilidad
Rivas & Esteban MVI
45/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - V
Antes se suposo que C
M
0
> 0 , pero es que es un requisito para que el avin
quede equilibrado con un ngulo de ataque positivo
C
M
CG
= C
M
0
+ C
M
wb
+ C
M
e
Rivas & Esteban MVI
46/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Cont. Long. Mandos Fijos
Control Longitudinal Esttico con Mandos Fijos - VI
C
M
CG
= C
M
0
+ C
M
wb
+ C
M
e
Rivas & Esteban MVI
47/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Outline
1
Introduccin
2
Sustentacin Total
3
Momento de Cabeceo
4
Vuelo Equilibrado
5
Control Longitudinal Esttico con Mandos Fijos
6
Estabilidad Longitudinal Esttica con Mandos Fijos
Estabilidad Longitudinal Esttica con Mandos Fijos
Punto Neutro con Mandos Fijos
Posicin ms Adelantada Posible del Centro de Gravedad
Rivas & Esteban MVI
48/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
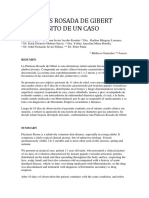
Estabilidad Longitudinal Esttica con Mandos Fijos - I
La estabilidad longitudinal esttica viene determinada por el signo de C
M
_
_
_
C
M
< 0 Estabilidad
C
M
> 0 Inestabilidad
C
M
= 0 Estabilidad Neutra
_
wb
> 0 C
M
CG
< 0 C
M
CG
= C
M
wb
< 0
wb
< 0 C
M
CG
> 0 C
M
CG
= C
M
wb
> 0
Vamos a determinar qu condiciones hacen que C
M
< 0
Rivas & Esteban MVI
49/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Estabilidad Longitudinal Esttica con Mandos Fijos - II
-
+
P
i
t
c
h
i
n
-
m
o
m
e
n
t
c
o
e
f
f
i
c
i
e
n
t
a
b
o
u
t
c
e
n
t
e
r
o
f
g
r
a
v
i
t
y
No moments
Destabilizing
moments
S
ta
b
le
Stable
Neutral
No moments
U
n
s
t
a
b
l
e
Destabilizing
moments
Trim
(equilibrium)
conition
!
" #
D
Neutral Point
#enter of $ravity % !
#enter of $ravity % "
#enter of $ravity % #
#enter of $ravity % D
Rivas & Esteban MVI
50/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - I
El punto neutro es aquella posicin del X
CG
en que C
M
= 0.
C
M
= a
wb
_
X
CG
X
ac,wb
_
a
t
_
1
t
S
t
S
_
X
ac,t
X
CG
_
Avin convencional: La contribucon del ala es una contribucin
positiva desestabilizante, mientras que la cola da una contribucin
negativa que hace un efecto estabilizante
Dado un tipo de avin de ala y cola convencional, el parmetro clave
que determina el C
M
es la posicin del centro de gravedad
X
CG
Rivas & Esteban MVI
51/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - II
La posicin del punto neutro NP la llamamos N
0
y por denicin es la
posicin del centro de gravedad que hace C
M
= 0
N
0
=
X
C
M
=0
C
M
= 0 a
wb
_
N
0
X
ac,wb
_
a
t
_
1
t
S
t
S
_
X
ac,t
N
0
_
N
0
_
a
wb
+ a
t
_
1
t
S
t
S
_
= a
wb
X
ac,wb
+ a
t
_
1
t
S
t
S
X
ac,t
N
0
=
a
wb
X
ac,wb
+ a
t
_
1
t
S
t
S
X
ac,t
a
wb
+ a
t
_
1
t
S
t
S
Veremos que C
M
es funcin de N
0
Rivas & Esteban MVI
52/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - III
C
M
= a
wb
_
X
CG
X
ac,wb
_
a
t
_
1
t
S
t
S
_
X
ac,t
X
CG
_
C
M
=
X
CG
_
a
wb
+ a
t
_
1
t
S
t
S
_
_
a
wb
X
ac,wb
+ a
t
_
1
t
S
t
S
X
ac,t
_
C
M
=
_
a
wb
+ a
t
_
1
t
S
t
S
_
_
X
CG
N
0
_
C
L
= a
wb
+ a
t
_
1
t
S
t
S
C
M
= C
L
X
CG
N
0
_
C
M
= C
L
_
N
0
X
CG
_
Si se quiere que C
M
< 0 (condicin de estabilidad) es necesario
N
0
X
CG
> 0
Rivas & Esteban MVI
53/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - IV
El centro de gravedad tiene que estar por delante del punto neutro
El punto neutro NP representa la posicin ms retrasada posible para
tener estabilidad esttica longitudinal
N
0
X
CG
Mrgen esttico con mandos jos
Tomando momentos respecto del punto neutro.
Rivas & Esteban MVI
54/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - V
Tomando momentos respecto del punto neutro.
C
M
NP
= C
M
CG
+ C
L
_
N
0
X
CG
_
C
M
0
+ C
M
wb
+ C
M
e
+
_
C
L
0
+ C
L
wb
+ C
L
e
_
_
N
0
X
CG
_
C
M
NP
= C
M
0
+ C
L
0
_
N
0
X
CG
_
+
_
C
M
e
+ C
L
e
_
N
0
X
CG
_
_
e
C
M
NP
= C
M
0
+ C
e
_
C
M
0
= C
M
0
+ C
L
0
_
N
0
X
CG
_
C
e
= C
M
e
+ C
L
e
_
N
0
X
CG
_
Rivas & Esteban MVI
55/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Punto Neutro con Mandos Fijos - VI
El coeciente de momentos no depende del
wb
C
M
NP
= C
M
0
+ C
e
_
C
M
0
= C
M
0
+ C
L
0
_
N
0
X
CG
_
C
e
= C
M
e
+ C
L
e
_
N
0
X
CG
_
Esto indica que N
0
es el centro aerodinmico del avin
aproximadamente.
NP AC
avion
Se dice aproximadamente por que se han hecho
algunas simplicaciones.
Aunque con el modelo propuesto se llega a una expresin de N
0
, en la
prctica, ese N
0
se determina mediante ensayos en vuelo.
A continuacin veremos que tambin hay una posicin lmite hacia
adelante del X
CG
Rivas & Esteban MVI
56/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Posicin ms Adelantada Posible del Centro de Gravedad - I
+
-
0
Recordando la denicin de la
deexin del timn de profundidad de
equilibrio
(
e
)
eq
=
C
M
0
+C
M
wb
C
M
C
M
= C
L
X
CG
N
0
_
(
e
)
eq
=
C
M
0
C
M
C
L
X
CG
N
0
)
C
M
wb
e
0
=
C
M
0
C
M
X
CG
= N
0
(
e
)
eq
=
e
0
Rivas & Esteban MVI
57/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Posicin ms Adelantada Posible del Centro de Gravedad - II
Rivas & Esteban MVI
58/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Posicin ms Adelantada Posible del Centro de Gravedad - III
+
-
0
La pendiente negativa vara segn
las diferentes posibles posiciones
X
CG
Si el
X
CG
aumenta, esa pendiente se
hace cada vez ms pequea en
mdulo
Si se adelanta el centro de gravedad,
cada vez se tienen pendientes
mayores
e
se hace ms negativo
pero tiene un lmite
e
min
tiene una naturaleza:
constructiva: limitacin fsica
aeronutica: entrada en prdida del
estabilizador
El
e
min
nos pone lmite a
X
CG
a la
hora de estabilizar el avin con cierto
ngulo de ataque.
El
e
0
X
CG
= N
0
Estabilidad
Neutra.
Rivas & Esteban MVI
59/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Posicin ms Adelantada Posible del Centro de Gravedad - III
+
-
0
El
e
min
nos pone lmite a
X
CG
a la
hora de estabilizar el avin con cierto
ngulo de ataque.
Se pueden tener diferentes
wb
hay que garantizar que el avin se
puede equilibrar para cualquier
posicin de
wb
.
Se puede tomar (
wb
)
max
que es el
que nos da C
L
max
X
CG
0
posicin ms atrasada
cuestin de estabilidad
X
CG
3
posicin ms adelantada
cuestin de control
X
CG
3
nos permite equilibrar
(controlar) el avin con el
e
min
a un
ngulo de ataque mximo
Rivas & Esteban MVI
60/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
Posicin ms Adelantada Posible del Centro de Gravedad - IV
(
e
)
eq
=
e
0
C
L
X
CG
N
0
)
C
M
wb
(
e
)
eq
=
C
M
0
C
M
C
L
X
CG
N
0
)
C
M
wb
X
CG
ms avanzado
wb
= (
wb
)
max
(
e
)
min
=
C
M
0
C
M
C
L
X
CG
N
0
)
C
M
e
(
wb
)
max
_
X
CG
_
f
= N
0
C
M
0
+ C
M
e
(
e
)
min
C
L
(
wb
)
max
Otro elemento importante es la derivada de (
e
)
eq
con respecto
wb
d(
e
)
eq
d
wb
=
C
L
X
CG
N
0
)
C
M
X
CG
N
0
= 0
d (
e
)
eq
d
wb
= 0
El criterio de estabilidad, que empez siendo C
M
< 0, se expresa ahora con:
N
0
X
CG
> 0
d (
e
)
eq
d
wb
< 0
Rivas & Esteban MVI
61/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos Est. Long Esttica Pto Neutro Mandos Fijos Posicin + Adelantada
References I
[MVI ETSIA 2003] J.J. Martnez Garca y M.A. Gmez Tierno, Apuntes de
Mecnica del Vuelo I, ETSIA, 2003
[Vinh 1993] Nguyen X. Vinh, Flight Mechanics of High-Performance Aircraft,
Cambridge University Press, 1993
[Hull 2007] David G. Hull, Fundamentals of Airplane Flight Mechanics,
Springer-Verlag, 2007
[Asselin 1997] Mario Asselin, An Introduction to Aircraft Performance, AIAA
Education Series, 1997.
[Pamadi 2004] Bandu N. Pamadi, Performance, Stability, and Control of
Airplanes, 2nd Edition, AIAA Education Series, 2004.
Rivas & Esteban MVI
You might also like
- Como Afrontar Los Problemas A Tiempo - DeustoDocument183 pagesComo Afrontar Los Problemas A Tiempo - Deustogustavojorge12No ratings yet
- Analisis Recipientes Presion BobinadosDocument11 pagesAnalisis Recipientes Presion Bobinadosgustavojorge12No ratings yet
- Metodo de PanelesDocument12 pagesMetodo de PanelesMiguel Rodriguez100% (3)
- M Etodo de Paneles para Alas FinitasDocument5 pagesM Etodo de Paneles para Alas Finitasgustavojorge12No ratings yet
- Dialnet GestionEstrategicaDeLaCalidadHerramientasDocument42 pagesDialnet GestionEstrategicaDeLaCalidadHerramientasgustavojorge12No ratings yet
- Guia INAOE 2004Document6 pagesGuia INAOE 2004api-3700232No ratings yet
- Proceso de ExtrusiónDocument39 pagesProceso de Extrusióngustavojorge12No ratings yet
- Sistemas de Calidad - Proveedores de AutomóvilDocument55 pagesSistemas de Calidad - Proveedores de Automóvilgustavojorge12No ratings yet
- Trabajo 3Document25 pagesTrabajo 3Yuri CarrascoNo ratings yet
- Curso SCILAB Part2Document40 pagesCurso SCILAB Part2gustavojorge12No ratings yet
- Elaboración de Normas de Competencia LaboralDocument92 pagesElaboración de Normas de Competencia LaboralAndres Holguin MartinezNo ratings yet
- Tutorial CNCDocument23 pagesTutorial CNCchicho6404No ratings yet
- UQROO FacilitatorTipsDocumentDocument68 pagesUQROO FacilitatorTipsDocumentgustavojorge12No ratings yet
- Condensacion de La Cromatina AdnDocument3 pagesCondensacion de La Cromatina AdnDiego De La TorreNo ratings yet
- Fracturas Del Cartílago de CrecimientoDocument2 pagesFracturas Del Cartílago de CrecimientoArantzaNo ratings yet
- Guía Productor Consumidor AllenBradlleyDocument9 pagesGuía Productor Consumidor AllenBradlleyAndres CuichanNo ratings yet
- Wuolah Free Parcial SolucionDocument9 pagesWuolah Free Parcial SolucionJorge PerezNo ratings yet
- Pitidiasis Rosada de GibertDocument6 pagesPitidiasis Rosada de GibertOdel JavierNo ratings yet
- America Del Sur en Un Mapamundi de 1489 PDFDocument31 pagesAmerica Del Sur en Un Mapamundi de 1489 PDFLeonardo Santoyo AlonsoNo ratings yet
- Teatro & ESI - Cuadernillo N°3Document41 pagesTeatro & ESI - Cuadernillo N°3Rosa ZalazarNo ratings yet
- Mercado de FuturosDocument24 pagesMercado de FuturosZiat Zait Ortega PérezNo ratings yet
- Diseño de Pavimentos - SubrasanteDocument9 pagesDiseño de Pavimentos - SubrasanteBe StevenNo ratings yet
- Actividades 7 Origen Del Sistema Solar-MartitaDocument2 pagesActividades 7 Origen Del Sistema Solar-MartitaPaula Alondra López AjúNo ratings yet
- Clase Libertad Financiera. 1 Basico.Document6 pagesClase Libertad Financiera. 1 Basico.marwincardonaNo ratings yet
- M19S3AI6Document3 pagesM19S3AI6Fátima EnriqueNo ratings yet
- Gastronomía Japonesa (PPTminimizer)Document40 pagesGastronomía Japonesa (PPTminimizer)felippe acevedoNo ratings yet
- Ruiz Limon Ramon - Historia de La Psicologia Y Sus AplicacionesDocument169 pagesRuiz Limon Ramon - Historia de La Psicologia Y Sus AplicacionesPsicoem75% (4)
- Geografia Como Comentar Un Mapa PDFDocument6 pagesGeografia Como Comentar Un Mapa PDFRuben MCNo ratings yet
- Inspección y pruebas de recipientes a presión soldadosDocument1 pageInspección y pruebas de recipientes a presión soldadosmguerra_635875No ratings yet
- Presentacion Pisos de Madera CrisDocument108 pagesPresentacion Pisos de Madera CrisGean Pierre RiosNo ratings yet
- Informe Balance de Energia MecanicaDocument17 pagesInforme Balance de Energia MecanicaJose Emmanuel Chema100% (1)
- 16.-Pets 16 Corte de ConcavasDocument6 pages16.-Pets 16 Corte de ConcavasKjatunMayu GutierrezNo ratings yet
- CANALETA Circular, Rectangular y TrapezoidalDocument11 pagesCANALETA Circular, Rectangular y TrapezoidalWendy RamírezNo ratings yet
- Clase 5Document78 pagesClase 5mlaura29No ratings yet
- Teoria de Henrry Muray PDFDocument27 pagesTeoria de Henrry Muray PDFErnestho Molina100% (1)
- Examen Final de Quimica General-Teoria 2021-IiDocument8 pagesExamen Final de Quimica General-Teoria 2021-IiJuan Diego Torre RojasNo ratings yet
- Calentador de Vapor DirectoDocument7 pagesCalentador de Vapor DirectoJORDYNo ratings yet
- La Planta de LlantenDocument16 pagesLa Planta de LlantenTaniaCarmenGuerreroNo ratings yet
- Guión para Reportaje de Realización Audiovisual IDocument2 pagesGuión para Reportaje de Realización Audiovisual INicolásGuerreroRobayo67% (3)
- Estimulacion PrenatalDocument3 pagesEstimulacion PrenatalYanela AlfaroNo ratings yet
- Libro Consulta de Puericultura 20111Document77 pagesLibro Consulta de Puericultura 20111Luis Reynaga JimenezNo ratings yet
- Plan de Produccion Terminado Gestion IndustrialDocument16 pagesPlan de Produccion Terminado Gestion IndustrialcasteledaNo ratings yet
- LQOI-CUADERNILLO 2018 OriginalDocument28 pagesLQOI-CUADERNILLO 2018 Originalmk tobarNo ratings yet