You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Black Grand MkIIDocument11 pagesBlack Grand MkIIAdriàPlanasNo ratings yet
- RTD2660Document401 pagesRTD2660AdriàPlanas0% (1)
- Falling Objects CalculationsDocument11 pagesFalling Objects CalculationsAnonymous GfPSYi4nNo ratings yet
- nRF51422 DKDocument52 pagesnRF51422 DKAdriàPlanasNo ratings yet
- HEF MemoryDocument18 pagesHEF MemoryAdriàPlanasNo ratings yet
- Dead ReckoningDocument225 pagesDead ReckoningAdriàPlanasNo ratings yet
- SPAD DiodesDocument29 pagesSPAD DiodesAdriàPlanasNo ratings yet
- I2c Um10204Document64 pagesI2c Um10204Dileep ChanduNo ratings yet
- LIDAR Lite Operating ManualDocument41 pagesLIDAR Lite Operating ManualAdriàPlanasNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tata Steel IdeationDocument13 pagesTata Steel IdeationAnu SinghNo ratings yet
- 7631 - Seiko 7T62A, 7T92A, 7T94A Part 2 of 3Document6 pages7631 - Seiko 7T62A, 7T92A, 7T94A Part 2 of 3jános bosnyákNo ratings yet
- 2008 - Review of Methods in Technology AssessmentDocument10 pages2008 - Review of Methods in Technology AssessmentpalmiereNo ratings yet
- Gravity FlowDocument11 pagesGravity FlowAnonymous U18LFvdfD100% (4)
- AIA'sDocument3 pagesAIA'sVictorNo ratings yet
- Research ProposalDocument3 pagesResearch Proposalapi-326232546No ratings yet
- Banana JuiceDocument33 pagesBanana JuiceDeepak Ola50% (2)
- Warning: Graphic Content: USPIS Statement of FactsDocument3 pagesWarning: Graphic Content: USPIS Statement of Factskballuck1No ratings yet
- RibbonDocument33 pagesRibbonjavluqNo ratings yet
- HDL 372 CDocument10 pagesHDL 372 Cdonodt7No ratings yet
- Sample Use Case LoginDocument5 pagesSample Use Case Logindaljsinj96No ratings yet
- VAPOR PRESSURE TESTER SETTINGSDocument22 pagesVAPOR PRESSURE TESTER SETTINGSKratos EspejoNo ratings yet
- TLB890 Hydraulic Pressure Testing PDFDocument13 pagesTLB890 Hydraulic Pressure Testing PDFjwd50% (2)
- Everything You Need to Know About Regenerative Air DryersDocument32 pagesEverything You Need to Know About Regenerative Air DryersPraveen RajNo ratings yet
- PAES 010-1: 2005 Agricultural Engineering StandardDocument9 pagesPAES 010-1: 2005 Agricultural Engineering StandardMaria Shesha NeheroNo ratings yet
- Erasenet: End-To-End Text Removal in The WildDocument16 pagesErasenet: End-To-End Text Removal in The WildThiện Vũ DuyNo ratings yet
- Evd 34Document2 pagesEvd 34Anonymous BkmsKXzwyKNo ratings yet
- Atmel 8951 CryptoAuth RSA ECC Comparison Embedded Systems WhitePaperDocument5 pagesAtmel 8951 CryptoAuth RSA ECC Comparison Embedded Systems WhitePaperRoberto RoberthNo ratings yet
- Daftar Spare Parts Alternatif Suzuki EveryDocument1 pageDaftar Spare Parts Alternatif Suzuki EveryNacz92100% (1)
- Bioreactor Engineering module-1: Basic design and construction of a fermentor and its ancillariesDocument23 pagesBioreactor Engineering module-1: Basic design and construction of a fermentor and its ancillariesssfoodtechNo ratings yet
- New Fibres For Home TextilesDocument4 pagesNew Fibres For Home TextilesVasant KothariNo ratings yet
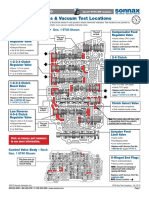
- 6T40-Vac Test LocationsDocument4 pages6T40-Vac Test LocationsMauricio Exequiel ChavezNo ratings yet
- Din 271Document1 pageDin 271Dule JovanovicNo ratings yet
- Download Ananthanarayan Paniker Microbiology 9th Edition PDFDocument2 pagesDownload Ananthanarayan Paniker Microbiology 9th Edition PDFmy familyNo ratings yet
- IV KaDocument16 pagesIV KaNéstor Josué González BalderasNo ratings yet
- GEA31885 TM2500 Brochure PDFDocument8 pagesGEA31885 TM2500 Brochure PDFThanapaet RittirutNo ratings yet
- Hawker perfect plus PzB-element technical data sheetDocument6 pagesHawker perfect plus PzB-element technical data sheetcrash2804No ratings yet
- Manpower ListDocument1 pageManpower ListrijulNo ratings yet
- ConceptDocument162 pagesConceptzinab90No ratings yet