You might also like
- Diseño de PavimentosDocument47 pagesDiseño de PavimentosJose Dilser Mejia Regalado100% (1)
- El Salvador Es Un Pequeño Pueblo en El Medio de La Nada en ChileDocument3 pagesEl Salvador Es Un Pequeño Pueblo en El Medio de La Nada en ChileJose Dilser Mejia RegaladoNo ratings yet
- Diseño de Escalera de Un Solo TramoDocument6 pagesDiseño de Escalera de Un Solo TramoJose Dilser Mejia RegaladoNo ratings yet
- Trabajo Señales de TransitoDocument49 pagesTrabajo Señales de TransitoJose Dilser Mejia RegaladoNo ratings yet
- Calculo de Los Angulos IDocument11 pagesCalculo de Los Angulos IJose Dilser Mejia RegaladoNo ratings yet
- R.V. - A.m.-2012 - II - 06 - Analogías - Práctica - at - at - Ab - Ag - ApcDocument3 pagesR.V. - A.m.-2012 - II - 06 - Analogías - Práctica - at - at - Ab - Ag - ApcJose Dilser Mejia Regalado100% (1)
- R.V. - A.M.-2012 - II - 03 - Antónimos LexicosDocument3 pagesR.V. - A.M.-2012 - II - 03 - Antónimos LexicosJose Dilser Mejia Regalado100% (1)
- R.V. - A.M.-2012 - II - 05 - Término ExcluidoDocument3 pagesR.V. - A.M.-2012 - II - 05 - Término ExcluidoJose Dilser Mejia Regalado0% (1)
- R.V. - A.M.-2012 - II - 09 - Hipónimos - HiperónimosDocument3 pagesR.V. - A.M.-2012 - II - 09 - Hipónimos - HiperónimosJose Dilser Mejia Regalado20% (5)
- Conjuntos 2Document5 pagesConjuntos 2Jose Dilser Mejia RegaladoNo ratings yet
- Publicacion en El RepositorioDocument8 pagesPublicacion en El RepositorioasistenteNo ratings yet
- Lp-017 DBC Estudio Isama - 2da Convocatoria - 2017Document106 pagesLp-017 DBC Estudio Isama - 2da Convocatoria - 2017Cristian MaximilianoNo ratings yet
- INFORME RESULTADOS DE RIESGOS Y PELIGROS Actividad 13Document25 pagesINFORME RESULTADOS DE RIESGOS Y PELIGROS Actividad 13cristian sanchezNo ratings yet
- Trabajo en Equipo.Document21 pagesTrabajo en Equipo.Cupecomi Zamna100% (3)
- Tesis de Biocombustible de Aceite de PalmaDocument35 pagesTesis de Biocombustible de Aceite de PalmaKevin SalasNo ratings yet
- Tabla 7Document5 pagesTabla 7leoNo ratings yet
- Jurisprudencia Cesion de Posicion ContractualDocument8 pagesJurisprudencia Cesion de Posicion ContractualDamaris Hinostroza50% (2)
- Conceptualizacion Administracion de VentasDocument4 pagesConceptualizacion Administracion de VentasFabricio SandovalNo ratings yet
- Intersecciones - 17-1308Document15 pagesIntersecciones - 17-1308frederick garciaNo ratings yet
- Analisis de Puestos Operativos y EjecutivosDocument4 pagesAnalisis de Puestos Operativos y EjecutivosCarolina HA0% (1)
- Memorandum 242 Cese de Funciones de Chiramaya Maestro de ObraDocument2 pagesMemorandum 242 Cese de Funciones de Chiramaya Maestro de ObraWashington Jorge100% (1)
- Equipos de Sostenimieento para Perforaciã N Subterrã Nea y Equipos de Perforaciã N DiamantinaDocument51 pagesEquipos de Sostenimieento para Perforaciã N Subterrã Nea y Equipos de Perforaciã N DiamantinaLuis Mendieta BrittoNo ratings yet
- TDR - Carretera JatunpampaDocument8 pagesTDR - Carretera JatunpampaJerson Noel Prudencio AcostaNo ratings yet
- Nueva Ley General de Sociedades - Ley 26887Document54 pagesNueva Ley General de Sociedades - Ley 26887Milagros Joseph VargasNo ratings yet
- Diapositivas Culpa PatronalDocument103 pagesDiapositivas Culpa PatronalHector ArevaloNo ratings yet
- Ensayo - Estadística Descriptiva ConceptosDocument10 pagesEnsayo - Estadística Descriptiva ConceptosDayann BernalNo ratings yet
- Egemsa SeguridadDocument66 pagesEgemsa SeguridadMarioOspinalNo ratings yet
- Energia en La EncrucijadaDocument232 pagesEnergia en La EncrucijadaJohn HidalgoNo ratings yet
- 01 - Procedimiento para Colocacion y Curado de Concreto 210Document5 pages01 - Procedimiento para Colocacion y Curado de Concreto 210jonathanNo ratings yet
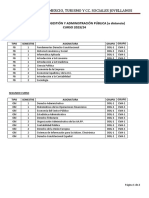
- Nomenclatura GAP A Distancia 23-24Document2 pagesNomenclatura GAP A Distancia 23-24Silvia Fernandez FernandezNo ratings yet
- Manuel MorenoDocument3 pagesManuel MorenoManuel MorenoNo ratings yet
- Futuro Fintech y Forex Trading: Intelligence Prime Capital LTDDocument49 pagesFuturo Fintech y Forex Trading: Intelligence Prime Capital LTDBarbaraNo ratings yet
- Sensor de Gas MQ2 Con Arduino UNODocument4 pagesSensor de Gas MQ2 Con Arduino UNODiego Origlnals MontoyaNo ratings yet
- Examen Final 2021-II (Solucionario)Document6 pagesExamen Final 2021-II (Solucionario)ARTURO ALEJANDRO RISCO DIAZNo ratings yet
- HOJA DE SEGURIDAD Fosfito de Potasio NutrifarmDocument2 pagesHOJA DE SEGURIDAD Fosfito de Potasio NutrifarmyopNo ratings yet
- Afiches de SeguridadDocument6 pagesAfiches de Seguridadjackson sanchez pradoNo ratings yet
- Hernia Hidrocele MiooooDocument19 pagesHernia Hidrocele Mioooovickine100% (1)
- MODELO TOMA DE DECISIONES Trabajo FinalDocument18 pagesMODELO TOMA DE DECISIONES Trabajo FinalYenni Alonso100% (2)
- Acuerdo de Asociación Económica, Concertación Política y Cooperación Entre Los Estados Miembros de Las Comunidades Europeas y MéxicoDocument9 pagesAcuerdo de Asociación Económica, Concertación Política y Cooperación Entre Los Estados Miembros de Las Comunidades Europeas y MéxicoANTONIO HERNANDEZNo ratings yet
- Fundamentos de Las Mediciones Electricas.Document33 pagesFundamentos de Las Mediciones Electricas.Hengenber MárquezNo ratings yet