You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Column Design With ExcelDocument40 pagesColumn Design With ExcelMatiur Rahman BasumNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Consumer Surplus:: at K Chabveka Economics NotesDocument28 pagesConsumer Surplus:: at K Chabveka Economics NotesShawn DzingayiNo ratings yet
- Upstream Process Engineering Course: 5. Produced WaterDocument27 pagesUpstream Process Engineering Course: 5. Produced WaterMohamed SelimNo ratings yet
- Dr. Rife and Philip Hoyland's 3.3 MHZ SweepDocument2 pagesDr. Rife and Philip Hoyland's 3.3 MHZ SweepKhalid Ibrahim100% (1)
- Buchholz Relay OperationDocument71 pagesBuchholz Relay Operationlinus abrahamNo ratings yet
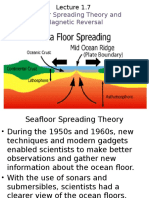
- Seafloor Spreading TheoryDocument16 pagesSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- Long Quiz Direct VariationDocument2 pagesLong Quiz Direct VariationHermann Dejero LozanoNo ratings yet
- Rationalizing The Seismic Coefficient Method PDFDocument41 pagesRationalizing The Seismic Coefficient Method PDFandremr15100% (1)
- Reversible and Irreversible ChangesDocument10 pagesReversible and Irreversible ChangesXerish DewanNo ratings yet
- Chapter 1 - Distillation PDFDocument107 pagesChapter 1 - Distillation PDFFatin Natasha NazriNo ratings yet
- The My Letter To All.1Document33 pagesThe My Letter To All.1Victor Corpus AntonioNo ratings yet
- Weebly ReportDocument15 pagesWeebly Reportapi-316004735No ratings yet
- Ns 3 TutorialDocument105 pagesNs 3 TutorialparabavireoNo ratings yet
- 11Document47 pages11Felipe Retamal100% (1)
- Corrosion Properties of Copper Nickel Alloys in Chlorinated Sea WaterDocument14 pagesCorrosion Properties of Copper Nickel Alloys in Chlorinated Sea WaterArunNo ratings yet
- Data Structure and AlgorithmDocument12 pagesData Structure and Algorithmleah pileoNo ratings yet
- A Generic Circular BufferDocument3 pagesA Generic Circular BufferSatish KumarNo ratings yet
- PowerPoint Practice Exercise 1 InstructionsDocument3 pagesPowerPoint Practice Exercise 1 InstructionsErick OumaNo ratings yet
- Mesh Based Multicast Routing ProtocolDocument10 pagesMesh Based Multicast Routing ProtocolArul JothiNo ratings yet
- Proview TutorialDocument12 pagesProview TutorialManoel NascimentoNo ratings yet
- Market Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduDocument54 pagesMarket Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduTI Logic ?? sobayedNo ratings yet
- Guide c07 742458Document14 pagesGuide c07 742458Chen ComseNo ratings yet
- Esam AliDocument23 pagesEsam AliYoussef AliNo ratings yet
- Calculation of Altitude CorrectionDocument3 pagesCalculation of Altitude CorrectionMikami TeruNo ratings yet
- Quantum Computing: Exercise Sheet 1: Steven Herbert and Anuj DawarDocument2 pagesQuantum Computing: Exercise Sheet 1: Steven Herbert and Anuj DawarJuan DiegoNo ratings yet
- Exercises Conditional SentencesDocument2 pagesExercises Conditional SentencesDivine GuancoNo ratings yet
- Virtual Memory & Demand PagingDocument22 pagesVirtual Memory & Demand PagingAli AhmadNo ratings yet
- Rules, Scripts and BeanshellDocument7 pagesRules, Scripts and BeanshelltgudyktzxNo ratings yet
- Ali Math Competition 3 English Reference SolutionsDocument11 pagesAli Math Competition 3 English Reference SolutionsJEREMIAH ITCHAGBENo ratings yet
- 3M Fire Barrier, Fire Protection & Fire Stopping ProductsDocument3 pages3M Fire Barrier, Fire Protection & Fire Stopping ProductsOtto BorgesNo ratings yet