Professional Documents
Culture Documents
Sec Simples RevC ECA Practica
Uploaded by
Adrian GustavoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Sec Simples RevC ECA Practica
Uploaded by
Adrian GustavoCopyright:
Available Formats
REPUBLICA
ARGENTINA
UNIVERSIDAD NACIONAL DE ROSARIO
FACULTAD DE CIENCIAS EXACTAS, INGENIERIA Y AGRIMENSURA
DEPARTAMENTO DE SISTEMAS E INFORMTICA
Laboratorio de Tecnologas Digitales e Informtica Industrial
APUNTES DE PRCTICA DE
SISTEMAS SECUENCIALES
SIMPLES
(para Ing. Elctrica)
Revisin C
Marzo 2013
Prctica de SISTEMAS SECUENCIALES SIMPLES
INDICE
1.
SOLUCIN INTUITIVA ................................................................................................................................... 3
1.1.
1.2.
2.
MODELIZACIN POR GRAFO DE ESTADOS .................................................................................................... 4
2.1.
2.2.
2.3.
2.4.
2.5.
2.6.
2.7.
3.
PROBLEMA 1.................................................................................................................................................. 3
PROBLEMA 1B ............................................................................................................................................... 4
PROBLEMA 2.................................................................................................................................................. 7
PROBLEMA 3.................................................................................................................................................. 8
PROBLEMA 4................................................................................................................................................ 10
PROBLEMA 5................................................................................................................................................ 11
PROBLEMA 6................................................................................................................................................ 12
PROBLEMA 6B ............................................................................................................................................. 13
PROBLEMA 7: LIMITACIONES DEL MTODO ......................................................................................................... 13
PRCTICA OPCIONAL...................................................................................................................................15
3.1.
3.2.
3.3.
PROBLEMA PO-1 .......................................................................................................................................... 15
PROBLEMA PO-2 .......................................................................................................................................... 19
PROBLEMA PO-3 .......................................................................................................................................... 20
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 2 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
SOLUCIN INTUITIVA
1.
1.1.
Problema 1
Disear el circuito de control para que un cilindro neumtico de la figura se desplace alternativamente entre sus finales de carrera, identificados como h1 y h2
h1
h2
La combinacin h1 h2 = 00 provoca dos salidas diferentes, y no se
dispone de ms entradas que hagan posible diferenciar la situacin. Las tcnicas de los sistemas combinacionales son insuficientes para solucionar este problema.
En los circuitos utilizados hasta ahora, la salida actual dependa exclusivamente de la combinacin de entradas actual (combinacionales). Existen circuitos (secuenciales) cuyas salidas dependen no solamente de las entradas actuales sino tambin de la secuencia previa de ellas:
recuerdan lo que pas antes. Estos circuitos se denominan memorias, y las hay de diferentes
tecnologas: electrnica, elctrica, neumtica, etc. En los mismos se incorpora una variable que
hasta el momento no utilizamos: el tiempo (lo que pas antes).
Analicemos el comportamiento del siguiente circuito denominado Flip-Flop RS, biestable
memoria de un bit.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 3 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
La combinacin de entradas 00 provoca una salida
que depende de la combinacin de entradas anteriores:
a=S
si previo a la combinacin 00, el set se puso en
1, la salida actual de Q ser 1
b=R
si previo a la combinacin de entradas 00 el
reset se puso en 1, la salida actual de Q ser
0
Para estos casos la salida actual depende de la secuencia de entradas previas.
Puede decirse tambin que la entrada 00 conserva
el ltimo estado alcanzado por la salida.
S1 = Q
S2 = Q
Lo explicado se ve reflejado en la siguiente tabla, que muestra la relacin entrada-salida de un
flip-flop RS:
R (reset)
0
0
1
1
S (set)
0
1
0
1
Q(t+)
Q(t)
1
0
Q(t) es el estado de la salida en el instante previo a la
aplicacin de una determinada combinacin de las
entradas RS; Q(t+) es el estado de la misma salida
inmediatamente despus de aplicar la combinacin.
Como conectara este circuito para solucionar el problema planteado inicialmente ?.
Solucin:
1.2.
Problema 1B
La siguiente expresin define la ecuacin de la memoria RS:
x = h2 + X h1 = h1 (X + h2)
Dibujar los circuitos con tecnologa neumtica y electromecnica que representa la ecuacin
desarrollada por ceros. Desde la salida x alimentar la cmara anterior de un cilindro de simple
efecto y analizar su funcionamiento.
2.
MODELIZACIN POR GRAFO DE ESTADOS
Un Grafo de Estados es un mtodo grfico utilizado para el modelado del funcionamiento de un
sistema secuencial. Se utilizan crculos identificados por nmeros para representar los estados,
y arcos orientados para representar las condiciones bajo las cuales se pasa de un estado a otro.
Para representar el estado inicial del sistema se utiliza un doble crculo.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 4 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
En este modelo modificamos el criterio vinculado a obtener la mnima relacin salida-entrada
con el propsito de utilizar todos los estados relevantes (por ejemplo, aquellos que sean significativos al considerar las situaciones en donde el mecanismo cambia sus salidas) que sean necesarios para definir el funcionamiento del sistema a automatizar.
Para este problema consideraremos solo dos estados:
estado inicial 1: representa que el cilindro se mueve hacia la derecha (H = 1)
estado 2: representa que el cilindro se mueve hacia la izquierda (H = 0)
El Grafo de Estados correspondiente a este comportamiento se muestra a continuacin:
1
H=1
h1
h2
H=0
El estado (1) representa la situacin inicial en que deber encontrarse el circuito al momento
de ponerse en marcha, para que pueda cumplirse la secuencia de funcionamiento pretendida;
se debe asegurar tambin que el otro estado (2) no se encuentre activado.
Cada estado se materializa con una memoria de un bit o Flip-Flop RS, ya sea bajo la configuracin de compuertas NOR, compuertas NAND, bloques RS o SR (depende de si se quiere prioridad
al RESET o al SET), bobinas de puesta a SET puesta a RESET, simplemente a travs de configuraciones de memorias implementadas con contactos, ya sea prioridad a la MARCHA a la
PARADA.
Implementacin con Memoria SR
Para este ejemplo aplicaremos memorias SR (prioridad al SET), cuya simbologa y tabla de funcionamiento son las siguientes:
S (set)
R (reset)
Q(t+)
Q(t+)
0
1
0
1
0
0
1
1
Q(t)
1
0
1
Q(t)
0
1
0
Implementacin con el Mtodo de Llamada-Respuesta
Para obtener las ecuaciones del Set y Reset de cada memoria podemos aplicar el denominado
Mtodo de LLAMADA-RESPUESTA, el cual evala:
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 5 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
a) las condiciones por las cuales cada estado se activa, considerando los arcos orientados que
llegan al estado
b) las condiciones por las cuales el estado se desactiva, considerando los estados siguientes
que pueden activarse a partir del considerado.
A cada estado le asociaremos una variable de estado Xi (i = 1, 2), la que estar en correspondencia con la salida (Q) de cada memoria SR.
Ecuaciones de estado
S1 = X2 h1 + C.I.
R1 = X2 h1
C.I. representa la condicin por la cual se activa inicialmente
esta memoria.
El trmino h1 se agreg a la ecuacin de R1 para eliminar la
ambigedad que surge cuando, al ser X2=1 habra una doble
orden a la memoria X1 (set = reset = 1), aunque en este caso al
usar prioridad al set se eliminara la indefinicin sobre su salida.
De modo similar:
Nuevamente, el trmino h2 se agreg a la ecuacin de R2 para
eliminar la ambigedad que surge cuando, al ser X1=1 habra
una doble orden a la memoria X2 (set = reset = 1), aunque en
este caso al usar prioridad al set se eliminara la indefinicin
sobre su salida.
S2 = X1 h2
R2 = X1 h2
Ecuacin de salida: H = X1
Circuito electrnico:
C.I.
h1 h2
X2
X1
S1
R1
S2
R2
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 6 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Si comparamos este circuito con la solucin obtenida en el problema 1 de la Prctica Opcional
(solucin por tabla de estados), observamos que por Grafo de Estados arribamos a un circuito
con mayor cantidad de componentes. Bajo el paradigma de la economa, la solucin por tabla
de estado sera, para este tipo de problemas, la ms adecuada.
Sin embargo por Grafo de Estados podremos modelar, en forma relativamente simple, problemas de mayor complejidad. Recordemos que si el nmero de entradas es importante, slo deben considerarse aqullas que, al cambiar, modifican el estado del automatismo. Adems, para
la implementacin de este tipo de problema se utilizan soportes fsicos con suficiente capacidad de memoria (API/PLC), lo que hace a este modelo el de uso ms adecuado, bajo las condiciones planteadas.
Programa utilizando lenguaje de contactos en un PLC:
C.I. (SM0.1)
X2
X1
h1
S
X2
X1
h1
R
X1
X2
h2
S
X1
X2
h2
R
H
X1
Asumiendo el uso de un PLC Siemens S7200, se us para la condicin inicial la marca especial
SM0.1 que se activa durante el primer ciclo de scan.
2.1.
Problema 2
El producto final de una fabricacin son barras metlicas cuya longitud puede ser inferior, igual
o superior a un valor L:
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 7 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
para la seleccin del producto terminado se utiliza el sistema de la figura, constituido por
una cinta transportadora que desplaza las barras entre dos barreras infrarrojas, separadas
por la distancia L. Las barreras infrarrojas estn constituidas por un emisor y un receptor de
luz infrarroja: el receptor entrega un 1 lgico si la barra se interpone entre el transmisor y
el receptor.
despus del segundo detector existe una trampa accionada por un cilindro neumtico. Si la
barra tiene una longitud superior a L, se debe activar la trampa y la barra caer. Una vez que
la barra pas el cilindro debe volver a su posicin de reposo.
la distancia entre barras es tal que no habr mas de una barra en la zona de medicin.
Disear el sistema secuencial asincrnico que sintetice lo solicitado.
Grafo de Estados
1
a=0
b=0
a=1
b=0
a=0
b=0
(ab=10)
(ab=00)
(ab=00)
2
a=1
b=1
(ab=11)
EV=1
Implementacin con el Mtodo de Llamada-Respuesta y Circuito
Se deja al alumno la obtencin de las ecuaciones de las memorias y el circuito final.
2.2.
Problema 3
La siguiente mquina traslada los paquetes (que llegan por gravedad y en orden indeterminado) hacia un puesto de clasificacin.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 8 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Implementar el circuito de control para que el sistema funcione como se describe a continuacin:
a) al llegar un paquete se accionar el contacto m, lo que provocar el accionamiento del
mbolo Cl y el traslado del paquete hacia la cinta transportadora que est detenida
b) cuando el paquete active al contacto a, la cinta transportadora Z se pondr en movimiento
c)
al liberarse el contacto m el mbolo retornar a su posicin de reposo
d) al soltarse el contacto a, la cinta seguir en movimiento; cuando el paquete accione al
contacto b, se detendr la cinta transportadora y sonar el timbre T
e) el paquete ser retirado por un operario y comenzar un nuevo ciclo, en el caso de que una
nueva caja est en condicin de ser transportada
f)
un mecanismo de seguridad (no mostrado) impedir que una nueva caja caiga para ser
desplazada cuando se est transportando otra caja hacia a.
Grafo de Estados
Implementacin con el Mtodo de Llamada-Respuesta y Circuito
Se deja al alumno la obtencin de las ecuaciones de las memorias y el circuito final.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 9 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
2.3.
Problema 4
Implementar el circuito de control de un sistema de suministro de agua que consta de un pozo,
una bomba y un depsito.
El depsito posee dos sensores que determinan los niveles mximo (DS) y mnimo (DI).El pozo
posee tambin un sensor de nivel mnimo (PI).
El funcionamiento pretendido es el siguiente:
si no hay suficiente nivel en el pozo la bomba no debe funcionar
si el nivel del depsito supera DS la bomba deber detenerse, y continuar en ese estado
hasta que el nivel del agua en el depsito sea inferior a DI
si el nivel del depsito est por debajo de DI y hay suficiente agua en el pozo, la bomba funcionar. La bomba seguir funcionando hasta que el nivel del depsito alcance a DS el nivel del pozo sea inferior a PI.
Grafo de Estados
1
PI=1
DI=0
PI=0
PI=0
DS=1
B=1
DS=0
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 10 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Implementacin con el Mtodo de Llamada-Respuesta y Circuito
Se deja al alumno la obtencin de las ecuaciones de las memorias y el circuito final.
2.4.
Problema 5
En un edificio de departamentos existen dos tanques de agua, uno pequeo en la planta baja y
otro mucho mayor en la azotea.
La entrada de agua al tanque de planta baja se maneja con una vlvula A. Si A=0, la vlvula estar cerrada y si A=1 la vlvula estar abierta. Este tanque posee dos indicadores de nivel: uno
inferior F1 y otro superior F2, que tomarn el valor uno cuando el agua los alcance.
El tanque grande posee un indicador de nivel F3, instalado a una altura tal que si el nivel de
agua no lo sobrepasa, ser posible volcar completamente el contenido del tanque chico sin que
se rebalse.
Una bomba B acarrear agua desde la planta baja si F2=1 y F3=0, hasta que F1=0. Siempre
que la bomba se ponga en marcha acarrear un tanque chico completo. La bomba no deber
trabajar en vaco, y mientras est funcionando la vlvula deber estar cerrada. Si la bomba est
apagada y F2=0, se abrir la vlvula hasta que F2=1.
Grafo de Estados
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 11 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Implementacin con el Mtodo de Llamada-Respuesta y Circuito
Se deja al alumno la obtencin de las ecuaciones de las memorias y el circuito final.
2.5.
Problema 6
Disear el automatismo de control de un montacargas que se desplazar entre dos pisos. En
ambos extremos se encuentran los finales de carrera FCI (planta baja) y FCS (primer piso).
estando el montacargas en cualquiera de sus posiciones extremas, la activacin de un pulsador P pondr en movimiento al motor del montacargas, y lo llevar a la posicin opuesta.
el motor se manejar a travs de otro circuito de control con las variables S y B:
si S=B=0, el motor estar detenido;
si S=1 y B=0, el motor girar en el sentido que desplace al montacargas hacia el primer
piso;
si S=0 y B=1, el motor girar en el sentido que desplace al montacargas hacia la planta
baja.
Control del
Motor
Motor
FCS
S
Circuito de
control
FCI
Grafo de Estados
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 12 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Implementacin con el Mtodo de Llamada-Respuesta y Circuito
Se deja al alumno la obtencin de las ecuaciones de las memorias y el circuito final.
2.6.
Problema 6B
Modificar el Problema 6 para que, dada la condicin inicial, primero se lleve al montacargas a la
planta baja (puede estar en cualquier posicin) y luego realice el funcionamiento descripto en
dicho Problema.
2.7.
Problema 7: limitaciones del mtodo
Nos proponemos automatizar el funcionamiento de un sistema conformado por dos tanques
para que su comportamiento sea como el que a continuacin se detalla:
a) al pulsarse M se llenarn los tanques inferiores a travs de las vlvulas Vi (i=1 2) respectivamente;
b) cuando alguno de los tanques se llene, detectado por hi=1 (i=1 2), se cerrar la vlvula Vi
(i=1 2), correspondiente;
c)
cuando cualquiera de los tanques est lleno se puede usar su contenido abriendo la vlvula
Wi (i=1 2), respectiva hasta alcanzar su nivel mnimo, detectado por bi=0 (i=1 2);
d) cuando ambos tanques estn vacos, se podr reiniciar el llenado, accionando nuevamente
el pulsador M.
M
DEPSITO
V1
V2
h1
h2
TANQUE 1
TANQUE 2
b1
b2
W1
W2
Grafo de Estados
El Grafo de Estado que sigue describe el comportamiento propuesto. La tabla que le sigue comenta el significado de cada estado del grafo:
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 13 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
__ __
b2 M
__ __
b1 M
1
__
b2 M
M
2
h1
__
b1
V2, W1
V2
V1, W2
__
b2
h1
5
__
b1
h2
V1, V2
h2
h2
6
__
b1 M
V1
W1, W2
__
b2
W2
h1
9
W1
Estado
1
2
3
4
5
6
7
8
9
Descripcin
Ambos tanques estn vacos
Ambos tanques llenndose
El tanque 1 se llen antes que el tanque 2
El tanque 2 se llen antes que el tanque 1
Ambos tanques vacindose
El tanque 1 se vaci pero el tanque 2 an no se llen
El tanque 2 se vaci pero el tanque 1 an no se llen
Estando vaco el tanque 1 se est vaciando el tanque 2
Estando vaco el tanque 2 se est vaciando el tanque 1
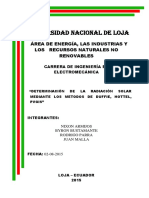
El siguiente esquema es una ampliacin del anterior, en donde el nmero de tanques se increment de 2 a 3. El funcionamiento es similar al descripto para 2 tanques.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 14 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Grafo de Estados
Se propone para el alumno la tarea de modelizar la variante utilizando Grafo de Estados. Aqu
nos limitaremos a analizar intuitivamente el funcionamiento (en forma parcial) en la siguiente
tabla, para poner en evidencia una limitacin de este mtodo:
E
V1
V2
V3
W1
W2
W3
Eq.
Todos los tanques vacos
SITUACIN
00
Todos los tanques llenndose
56
Partiendo del estado 2 se puede seguir la siguiente secuencia:
3
El Tanque 1 se llen antes que los Tanques 2 y 3
28
Se llen el Tanque 2 mientras se vaciaba el Tanque 1; Tanque 3 llenndose
14
Se llen el Tanque 3 mientras se vaciaba el Tanque 1; Tanque 2 llenndose
21
Todos los Tanques vacindose
07
Se vaci el Tanque 1 mientras se vaciaban los Tanques 2 y 3
03
Se vaci el Tanque 2 mientras se vaciaban los Tanques 1 y 3
05
Se vaci el Tanque 3 mientras se vaciaban los Tanques 1 y 2
06
10
Se vaciaron los Tanques 1 y 2 mientras se vaciaba el Tanque 3
01
11
Se vaciaron los Tanques 1 y 3 mientras se vaciaba el Tanque 2
02
12
Se vaciaron los Tanques 2 y 3 mientras se vaciaba el Tanque 1
04
Se vaciaron los tres Tanques
00
Partiendo del estado 3 se puede seguir la siguiente secuencia:
13
El Tanque 1 se vaci antes de que se llenaran los Tanques 2 y 3
24
14
Se llen el Tanque 2 con el Tanque 1 vaco; Tanque 3 llenndose
10
Se llenaron los Tanques 2 y 3, con el Tanque 1 vaco
03
Partiendo del estado 13 se puede seguir la siguiente secuencia:
15
Se llen el Tanque 3 con el Tanque 1 vaco; Tanque 2 llenndose
17
17
Se llen el Tanque 2 con el Tanque 1 vaco; Tanque 3 vacindose
03
Nota: Eq. es una columna de verificacin: contiene el equivalente decimal de las combinaciones V1-V2-3-W1W2-W3, y se la usa para evitar combinaciones repetidas.
Quedan por analizar otras secuencias como, por ejemplo, que a partir del estado 2 se llene primero el tanque 2 primero el tanque 3, etctera. Pero tan slo lo analizado muestra que, comparado con el sistema de 2 tanques, el modelado para 3 tanques hizo crecer el nmero de estados en forma exponencial. Pensemos en lo que sucedera si en vez de 3 los tanques fueran 4
ms !.
Esto pone en evidencia la dificultad de este modelo para representar procesos con evoluciones
en paralelo, debido a las combinaciones de las posibles evoluciones, lo que enmaraa innecesariamente la descripcin. El modelado por Redes de Ptri salva esta dificultad.
3.
PRCTICA OPCIONAL
Se plantean en esta seccin varios problemas resueltos mediante Tablas de estado o Mtodo
de Huffman.
3.1.
Problema PO-1
Disear el circuito de control para que un cilindro neumtico se desplace alternativamente entre sus finales de carrera identificados como h1 y h2.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 15 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Tabla de Fases Primitiva
Caractersticas de la tabla:
posee tantas columnas como combinaciones diferentes de entradas, ms una columna por
cada salida
las columnas se identifican usando el cdigo binario reflejado
cada fila representa un conjunto posible de situaciones, y se la denomina estado interno.
Las situaciones posibles son:
estado estable (uno por estado interno): identificado con un nmero circundado que
representa las diferentes situaciones
estados inestables: identificados con nmeros sin circundar que representan los estados
estables a los que puede evolucionar el sistema
estados indiferentes (en blanco en la figura): representan situaciones imposibles
opcionalmente, se pueden describir verbalmente las diferentes situaciones que representan
cada uno de los estados a la derecha de la columnas de salidas.
En la tabla se pone de manifiesto que los estados 2 y 4 requieren el uso de memorias, ya que
las mismas combinaciones de entradas generan dos situaciones diferentes. Al carecer de
entradas que permitan diferenciar las situaciones, se deben incorporar nuevas variables,
denominadas variables internas o secundarias, las que sumadas, a las entradas primarias,
diferencian todas las situaciones de funcionamiento.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 16 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Tabla de Fases Simplificada
Simplificacin de estados equivalentes
En el transcurso de la resolucin del problema puede ocurrir que se identifiquen con nmeros
diferentes dos estados iguales o equivalentes. Se deber representar en este caso solo uno de
ellos.
La deteccin se lleva cabo sobre los estados estables definidos en la Tabla Primitiva. Dos
estados son equivalentes cuando:
son estables en la misma columna
tienen las mismas salidas
a partir de ellos se repiten las mismas secuencias de estados para las mismas combinaciones
de entradas posibles.
Fusin de filas
Manipulando la Tabla de Fases Primitiva es posible tener en una misma fila ms de un estado
estable, obviamente en columnas diferentes. Para ello se deben poder fusionar en una sola
lnea (estado interno) dos ms lneas de la Primitiva. La Tabla de Fases resultante, conteniendo menos filas, se denomina Tabla de Fases Simplificada.
Para determinar la posibilidad de fusionar se representan en el plano los diferentes estados
estables (1, 2, 3 y 4) y se analiza, columna a columna, la posibilidad de fusin, sin considerar el
valor de las salidas. Para nuestro ejemplo:
Las barras muestran las posibilidades de fusin. Las lneas 2 y 3 no se pueden fusionar porque
en la columna h1.h2=00 tenemos dos estados diferentes; lo mismo ocurre entre las lneas (1 y
3), (1 y 4), (2 y 3), (2 y 4). Las nicas posibilidades son fusionar la lnea 1 con la 2, y la 3 con la 4.
La Tabla de Fases Simplificada se muestra en la figura siguiente. Representa las mismas situaciones que la Primitiva, pero con slo dos filas. Los valores de la salida se han indicado a la derecha de los estados estables correspondientes.
Adems, se han identificado las filas con una variable X, que es la variable secundaria en este
problema. La fusin de filas ha simplificado la cantidad de variables secundarias: dos filas se
pueden diferenciar con una sola variable.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 17 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
En esta tabla quedan sintetizadas:
el valor actual (X en mayscula) de la variable secundaria, y su valor futuro en los contenidos
de las celdas
el valor de la salida en funcin de las entradas primarias (h1, h2) y de la variable secundaria
(X)
Codificacin
En este paso obtendremos la relacin numrica entre la variable secundaria y las entradas primarias (ecuacin de estado), y la de la salida en funcin de las entradas h1, h2 y X (ecuacin de
salida):
x = h2 + X h1 = h1 (X + h2)
H=X
Desarrollando por ceros, y planteando una sntesis usando compuertas NOR: x = h1 + (X + h2) ,
lo cual nos lleva a uno u otro de los siguientes circuitos:
El circuito que se obtiene coincide con la resolucin del problema en forma intuitiva.
Se deja para el alumno desarrollar las ecuaciones por unos, y obtener el circuito con compuertas NAND.
Uso de memoria explcita
A partir de la Tabla de Fases Simplificada se pueden obtener directamente las ecuaciones de set
y reset de la memoria de estado interno:
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 18 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Con ayuda de la Tabla de Verdad del flip-flop RS obtenemos su tabla de excitacin:
S (set)
0
1
0
1
R (reset)
0
0
1
1
X(t+)
X(t)
1
0
X(t)
0
0
1
1
X(t+)
0
1
0
1
R (reset)
(1/0)
0
1
1
S (set)
0
1
0
(1/0)
X(t) representa los valores actuales de X, mientras que X(t+) representa sus valores futuros
(que son los que aparecen en las celdas de la Tabla de Fases Simplificada).
Reemplazando en la Tabla de Fases Simplificada se obtienen las tablas del reset y set de X:
h1 h2
00
X
01
11
10
h1 h2
00
X
01
11
10
h1
Flip-flop
R-S
h2
Rx = h1
3.2.
_
H=X
Sx = h2
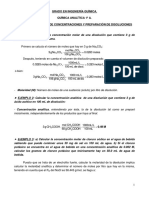
Problema PO-2
El producto final de una fabricacin son barras metlicas cuya longitud puede ser inferior, igual
o superior a L.
Trampa
L
Cinta
Barra
Sensores
infrarrojos
Al cilindro
b
a
Sistema
secuencial
asincrnico
EV
Para la seleccin del producto terminado, se utiliza el sistema de la figura anterior, constituido
por una cinta transportadora que desplaza a las barras entre dos barreras infrarrojas, separadas
una distancia L. Las barreras infrarrojas estn constituidas por un emisor y un receptor de luz
infrarroja. El receptor entregar un 1 lgico si la barra se interpone entre el transmisor y el
receptor.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 19 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Despus del segundo detector existe una trampa accionada por un cilindro neumtico. Si la
barra tiene una longitud superior a L, se deber activar la trampa y la barra caer. Una vez que
la barra pas el cilindro deber volver a su posicin de reposo.
Se garantiza que la distancia entre barras es tal que no habr ms de una barra en la zona de
medicin.
Disear el sistema secuencial asincrnico que sintetice lo solicitado.
Tabla de Fases Primitiva
ab
ab
00
01
11
10
5
1
ab
00
01
11
10
00
01
11
10
Tabla de Fases Simplificada
Tabla de Estado
Tabla de Salida
x = a b + b X = (a b) (b X)
EV = X
__
Biestable R S
a
_
S
EV = X
_
R
El biestable (flip-flop) R S activa su salida con niveles bajos en las entradas. La combinacin de
entradas 11 es la que guarda la salida anterior.
3.3.
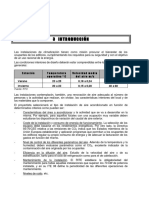
Problema PO-3
La mquina mostrada en el esquema siguiente traslada los paquetes que llegan, por gravedad y
en orden indeterminado, hacia un puesto de clasificacin.
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 20 de 21
Prctica de SISTEMAS SECUENCIALES SIMPLES
Implementar el circuito de control para que el funcionamiento sea como el descripto a continuacin:
a) al llegar un paquete se acciona el contacto m, lo que provoca el accionamiento del mbolo
Cl y el traslado del paquete hacia la cinta transportadora (que est detenida)
b) cuando el paquete activa el contacto a, la cinta transportadora Z se pone en movimiento
c) al liberarse el contacto m, el mbolo retorna a su posicin de reposo
d) al soltarse el contacto a, la cinta sigue en movimiento. Cuando el paquete acciona el contacto b, la cinta transportadora se detiene y suena el timbre T
e) el paquete ser retirado por un operario y comenzar un nuevo ciclo, en el caso de que una
nueva caja est en condicin de ser transportada
f) un mecanismo no mostrado impedir que caiga una nueva caja para ser desplazada cuando
an se est transportando otra caja hacia el sensor a
Solucin tabular (Prctica opcional)
mab
Z
CI
000 001 011 010 110 111 101 100
1
3
4
5
5
4
8
Solucin:
x =a+b X
CI = m (a + b X )
Z=X
T =b
LABORATORIO DE TECNOLOGAS DIGITALES E INFORMTICA INDUSTRIAL - DSI - FCEIA U.N.R
Pgina 21 de 21
You might also like
- La Cultura Del Transporte Público y La de BicicletaDocument4 pagesLa Cultura Del Transporte Público y La de BicicletaAdrian GustavoNo ratings yet
- La Chopper Eléctrica de Sine CyclesDocument3 pagesLa Chopper Eléctrica de Sine CyclesAdrian GustavoNo ratings yet
- La Ciudad de Nueva York Completa Las Pruebas Del Autobús Eléctrico de BYDDocument2 pagesLa Ciudad de Nueva York Completa Las Pruebas Del Autobús Eléctrico de BYDAdrian GustavoNo ratings yet
- Crecen Las Instalaciones Respaldadas Por BateríasDocument2 pagesCrecen Las Instalaciones Respaldadas Por BateríasAdrian GustavoNo ratings yet
- Bosch Trabaja en Una Batería de 50 KWH Que Pesa 190 KG y Se Carga Hasta El 75Document3 pagesBosch Trabaja en Una Batería de 50 KWH Que Pesa 190 KG y Se Carga Hasta El 75Adrian GustavoNo ratings yet
- Todos Los Autobuses Públicos de Ámsterdam Serán Eléctricos en 2025Document2 pagesTodos Los Autobuses Públicos de Ámsterdam Serán Eléctricos en 2025Adrian GustavoNo ratings yet
- Guatemala Ensamblará Auto y PickDocument5 pagesGuatemala Ensamblará Auto y PickAdrian GustavoNo ratings yet
- Catamaranes EléctricosDocument4 pagesCatamaranes EléctricosJoshua PerryNo ratings yet
- Corpusculo de BarrDocument3 pagesCorpusculo de BarrAndrew K-rolinaNo ratings yet
- Academiasemestral Abril - Agosto 2002 - II Química (32) 11Document2 pagesAcademiasemestral Abril - Agosto 2002 - II Química (32) 11Michael Slater Ocaña PuiconNo ratings yet
- Informe10 VBDocument4 pagesInforme10 VBlfmzNo ratings yet
- Modelos de Exámenes QAIDocument46 pagesModelos de Exámenes QAIMiilenne100% (1)
- Tecnica ThetahealingDocument16 pagesTecnica ThetahealingMauricio Astorga100% (1)
- M e M o R I A D e C A L C U L o Dunas Costeras ArrecifesDocument19 pagesM e M o R I A D e C A L C U L o Dunas Costeras ArrecifesSaulo CatzinNo ratings yet
- Metodos Teóricos de Radiación SolarDocument20 pagesMetodos Teóricos de Radiación SolarJack XaviNo ratings yet
- Mecanica de Suelos Avanzada 2Document57 pagesMecanica de Suelos Avanzada 2Juan Luis Guerra ChayñaNo ratings yet
- Linea de Tiempo PlasticoDocument9 pagesLinea de Tiempo PlasticoCabo VlogNo ratings yet
- Propuesta Mejoramiento Instalaciones Electricas CRISTOFER MENDOZA 31-07-2019Document44 pagesPropuesta Mejoramiento Instalaciones Electricas CRISTOFER MENDOZA 31-07-2019CENAIDA MENDOZANo ratings yet
- Corinta DiseDocument12 pagesCorinta DiseCorinta Violeta Caman RamosNo ratings yet
- Calculo de ConcentracionesDocument7 pagesCalculo de ConcentracionesSoraya Unión ÁlvarezNo ratings yet
- William Benjamin Lema Tamay CVDocument3 pagesWilliam Benjamin Lema Tamay CVwilliamNo ratings yet
- Sifón NormalDocument13 pagesSifón NormalEdgar Saldaña TejadaNo ratings yet
- Esposiciones Valvulas de ExpansionDocument5 pagesEsposiciones Valvulas de ExpansionDiego MolinaNo ratings yet
- Diapos de Informe Ley CeroDocument10 pagesDiapos de Informe Ley CeroBritaniKeithNo ratings yet
- 22 IFPpotencialDocument4 pages22 IFPpotencialalexis jonathanNo ratings yet
- 1 Movimiento OndulatorioDocument54 pages1 Movimiento OndulatorioJeanPoll RiemalasuerteNo ratings yet
- La Elipse (Tierra)Document14 pagesLa Elipse (Tierra)Javier J Hernández HNo ratings yet
- !ruge Como Leon! - Como Hablar e - Alejandro Perez TobiasDocument161 pages!ruge Como Leon! - Como Hablar e - Alejandro Perez TobiasMarcelo Cojulún PolancoNo ratings yet
- DCCT-GNL-050 Criterios de Aceptacion y Rechazo de Mercancia PDFDocument84 pagesDCCT-GNL-050 Criterios de Aceptacion y Rechazo de Mercancia PDFPiscifactoría Remar PastoNo ratings yet
- Taller de Vias Alineamientos HorizontalesDocument5 pagesTaller de Vias Alineamientos HorizontalesJoheddys CastilloNo ratings yet
- Estudio de Algunas Propiedades Del AlmidónDocument8 pagesEstudio de Algunas Propiedades Del AlmidónGustavoSanchezNo ratings yet
- Manual de Conductos de Aire Acondicionado - ISOVER PDFDocument119 pagesManual de Conductos de Aire Acondicionado - ISOVER PDFOmar Ramírez ReynosoNo ratings yet
- 17 GeografiaDocument22 pages17 GeografiaRegys José Gamarra SulcaNo ratings yet
- VOLADURA ExpoDocument32 pagesVOLADURA ExpoAnderson CapchaNo ratings yet
- 2.2 Métodos de Diseño de Separadores PDFDocument82 pages2.2 Métodos de Diseño de Separadores PDFAndres Garcia100% (2)
- Tiempo de MuestreoDocument6 pagesTiempo de MuestreoBernie_Garcia__9886No ratings yet
- Analisis de Un Cubo Elemental PDFDocument20 pagesAnalisis de Un Cubo Elemental PDFJoaquin CastellanoNo ratings yet
- Fisuracion en CalienteDocument31 pagesFisuracion en CalienteLuis Espinoza SanchezNo ratings yet