You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Teaching A Foreign Language and Foreign Culture To Young LearnersDocument13 pagesTeaching A Foreign Language and Foreign Culture To Young Learnerssonu thigleNo ratings yet
- Teaching A Foreign Language and Foreign Culture To Young LearnersDocument13 pagesTeaching A Foreign Language and Foreign Culture To Young Learnerssonu thigleNo ratings yet
- 51 2 4 Neff RucynskiDocument12 pages51 2 4 Neff Rucynskisonu thigleNo ratings yet
- KeyShot 3 - ManualDocument252 pagesKeyShot 3 - ManualRoberto CastañedaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Yaesu VR 120Document44 pagesYaesu VR 120Chema MelidaNo ratings yet
- (BDDJ-2016-0006) Introduction of New Printer NKG-901Document4 pages(BDDJ-2016-0006) Introduction of New Printer NKG-901じゃしゅてぃん ぅうNo ratings yet
- Fingerstyle Guitar - Fingerpicking Patterns and ExercisesDocument42 pagesFingerstyle Guitar - Fingerpicking Patterns and ExercisesSeminario Lipa100% (6)
- Surface Roughness TesterDocument1 pageSurface Roughness TesterRenju NairNo ratings yet
- Installation, and Maintenance Manual For Gas Fired, Wall-Hung BoilersDocument24 pagesInstallation, and Maintenance Manual For Gas Fired, Wall-Hung Boilersca3accoNo ratings yet
- Series: 25 TON (222 KN)Document2 pagesSeries: 25 TON (222 KN)Marius IlcaNo ratings yet
- 1-18 Easy Fix Double Glazing Counter Price ListDocument16 pages1-18 Easy Fix Double Glazing Counter Price ListChris PaceyNo ratings yet
- Ignitability and Explosibility of Gases and VaporsDocument230 pagesIgnitability and Explosibility of Gases and VaporsKonstantinKot100% (3)
- Waterjet CutterDocument4 pagesWaterjet CutterCarlos RamirezNo ratings yet
- Creating Flight Plan and User Waypoint Files For The Flight1 GTNDocument6 pagesCreating Flight Plan and User Waypoint Files For The Flight1 GTNJosé A. Montiel QuirósNo ratings yet
- Zf6 6r60 Zip BookletDocument8 pagesZf6 6r60 Zip BookletPablo Farfan Alvarez100% (1)
- Pump Primer 1 AssDocument34 pagesPump Primer 1 AssGkou DojkuNo ratings yet
- Indian Standard: Stationary Valve Regulated Lead Acid Batteries - SpecificationDocument12 pagesIndian Standard: Stationary Valve Regulated Lead Acid Batteries - Specificationmukesh_kht1No ratings yet
- 020 - MDCC For Sluice GatesDocument1 page020 - MDCC For Sluice GatesYOGESH PHALKENo ratings yet
- Pursuit ManualDocument26 pagesPursuit Manualhunter9903No ratings yet
- Retail Generation ZDocument24 pagesRetail Generation ZSomanNo ratings yet
- User Manual For Online Super Market WebsiteDocument3 pagesUser Manual For Online Super Market WebsiteTharunNo ratings yet
- TCE BE EEE RulesandRegulationsDocument509 pagesTCE BE EEE RulesandRegulationsAplieNo ratings yet
- Operaional Manual: YZBF-120LDDocument16 pagesOperaional Manual: YZBF-120LDMohamed AnwarNo ratings yet
- CS-Z25XKEW - 1, Evaporator Specification SheetDocument1 pageCS-Z25XKEW - 1, Evaporator Specification SheetpaulNo ratings yet
- ACR Methodology For The Conversion of High-Bleed Pneumatic Controllers in Oil and Natural Gas Systems v1.1Document33 pagesACR Methodology For The Conversion of High-Bleed Pneumatic Controllers in Oil and Natural Gas Systems v1.1mlkrembsNo ratings yet
- ASME B16.47 Series A FlangeDocument5 pagesASME B16.47 Series A FlangePhạm Trung HiếuNo ratings yet
- Na Edifact Desadv SpecificationsDocument17 pagesNa Edifact Desadv Specificationsrajendra2505No ratings yet
- Electronic Circuits - II Lab ManualDocument26 pagesElectronic Circuits - II Lab Manualbalabasker100% (1)
- LogDocument2 pagesLogFerdian SumbaNo ratings yet
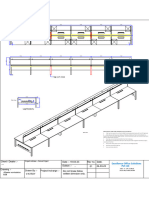
- 6seater Workstation B2BDocument1 page6seater Workstation B2BDid ProjectsNo ratings yet
- Firewall Geometric Design-SaiTejaDocument9 pagesFirewall Geometric Design-SaiTejanaveenNo ratings yet
- Running Head: Digital Storytelling As An Assessment Tool 1Document9 pagesRunning Head: Digital Storytelling As An Assessment Tool 1vifongiNo ratings yet
- Electrical Design Checklist v1.2Document39 pagesElectrical Design Checklist v1.2huangjlNo ratings yet
- Research Proposal GuidelinesDocument8 pagesResearch Proposal Guidelineskomal khalidNo ratings yet