You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
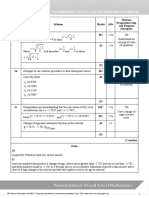
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Nassim Haramein Answers His CriticsDocument7 pagesNassim Haramein Answers His Criticsr.viola9101No ratings yet
- TCS - Mock Paper 1Document36 pagesTCS - Mock Paper 1CS2146Sakshi KhatkeNo ratings yet
- 2018-06-05Document34 pages2018-06-05XxyyzzNo ratings yet
- Fire Load CalculationDocument8 pagesFire Load Calculation4045 VIKRAM KNo ratings yet
- GS 122 2 Crystal Symmetry ModifiedDocument23 pagesGS 122 2 Crystal Symmetry ModifiedRicardo VelozNo ratings yet
- Intro To PdesDocument16 pagesIntro To PdesJihan PacerNo ratings yet
- Progress in The Spectacle Correction of Presbyopia PDFDocument27 pagesProgress in The Spectacle Correction of Presbyopia PDFjuliogarridoNo ratings yet
- Fall 2016 Chapter 1 Lecture 3Document18 pagesFall 2016 Chapter 1 Lecture 3Tan Quoc HuynhNo ratings yet
- Noc18 Ee33 Assignment5Document6 pagesNoc18 Ee33 Assignment5Hari PrasathNo ratings yet
- Additional Maths Project Work 2 2011Document13 pagesAdditional Maths Project Work 2 2011Alvin Soo100% (3)
- IVT Network - A Risk Matrix Approach For Media Simulation Trials - 2014-04-30Document11 pagesIVT Network - A Risk Matrix Approach For Media Simulation Trials - 2014-04-30vijayns_250355172No ratings yet
- New Products Management: Merle Crawford Anthony Di Benedetto 10 EditionDocument19 pagesNew Products Management: Merle Crawford Anthony Di Benedetto 10 EditionmzumziNo ratings yet
- Model QP IV Maths Sa 1Document9 pagesModel QP IV Maths Sa 1sarveshfdk48No ratings yet
- M1Document5 pagesM1Mavis WongNo ratings yet
- General Physics A1: Ho Chi Minh City University of TechnologyDocument9 pagesGeneral Physics A1: Ho Chi Minh City University of TechnologyKhoa NguyenNo ratings yet
- DADocument40 pagesDAkrishneel sharmaNo ratings yet
- Machines 05 00021 v3 PDFDocument28 pagesMachines 05 00021 v3 PDFAuditio MandhanyNo ratings yet
- General Procedure of FEA 7Document30 pagesGeneral Procedure of FEA 7tauasi_1No ratings yet
- C Program To Delete Middle Node of Singly Linked List: Required KnowledgeDocument2 pagesC Program To Delete Middle Node of Singly Linked List: Required KnowledgePratikRoyNo ratings yet
- Shifting of GraphsDocument8 pagesShifting of GraphsChampionip4pNo ratings yet
- Sequence Guide - Soda Can Calorimeter Student SampleDocument3 pagesSequence Guide - Soda Can Calorimeter Student Sampleapi-334553540No ratings yet
- Sextus Empiricus and Ancient Physics AlgraDocument442 pagesSextus Empiricus and Ancient Physics AlgraCarmelo GomezNo ratings yet
- Python Code For Artificial Intelligence: Foundations of Computational AgentsDocument221 pagesPython Code For Artificial Intelligence: Foundations of Computational AgentslevarioNo ratings yet
- C++ Language: By:-Aakash Kaushik #9289817971, 98919893083Document33 pagesC++ Language: By:-Aakash Kaushik #9289817971, 98919893083Ansh GanatraNo ratings yet
- L6 - Intermediate Code GenerationDocument56 pagesL6 - Intermediate Code GenerationIQRA Talim ClassNo ratings yet
- Mechanics NotesDocument220 pagesMechanics NotesPunit BadalNo ratings yet
- PHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurDocument21 pagesPHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurSABARI BALANo ratings yet
- Pushover Analysis in SapDocument5 pagesPushover Analysis in SapSiddharthJoshiNo ratings yet