You might also like
- AmancoDocument4 pagesAmancoottoherNo ratings yet
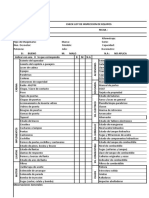
- Formato de Check ListDocument4 pagesFormato de Check ListAmérico Hernández MendozaNo ratings yet
- Proyecto Final - Casa DomoticaDocument25 pagesProyecto Final - Casa DomoticaKevin PalmaNo ratings yet
- Sensor de TemperaturaDocument9 pagesSensor de TemperaturaKevin Palma100% (1)
- Laboratorio N°8 - Ram JetDocument36 pagesLaboratorio N°8 - Ram JetVictor Angel Fuertes SaboyaNo ratings yet
- Deep Learning Aplicado - BrochureDocument5 pagesDeep Learning Aplicado - BrochureGerman Doza Ramirez0% (1)
- Tipo de Bombas MDP 02 P 05Document28 pagesTipo de Bombas MDP 02 P 05Felix CarvajalNo ratings yet
- Cont Digital Cap 1Document12 pagesCont Digital Cap 1Bombonzhitoh Zhokolate TelloNo ratings yet
- Laboratorio N°4Document23 pagesLaboratorio N°4Kevin Palma100% (1)
- Informe 2 FISICA IIIDocument14 pagesInforme 2 FISICA IIIKevin PalmaNo ratings yet
- Lab 1 Circuitos Electronicos IIDocument11 pagesLab 1 Circuitos Electronicos IIKevin PalmaNo ratings yet
- Lab 2 Ingenieria de ControlDocument10 pagesLab 2 Ingenieria de ControlKevin Palma100% (1)
- Lab 1 Ingenieria de ControlDocument6 pagesLab 1 Ingenieria de ControlKevin Palma100% (1)
- Informe de Fisica EQUILIBRIODocument7 pagesInforme de Fisica EQUILIBRIOKevin PalmaNo ratings yet
- LinealizacionlDocument3 pagesLinealizacionlKevin PalmaNo ratings yet
- Paralelo Cinemática CNC Investigación Del Sistema 3PRSDocument6 pagesParalelo Cinemática CNC Investigación Del Sistema 3PRSAlicia VizaNo ratings yet
- Bimferénciate Especialista3DDocument15 pagesBimferénciate Especialista3DMiguel SambranoNo ratings yet
- Usando Convenciones de NombresDocument4 pagesUsando Convenciones de NombresNico LuisNo ratings yet
- Plantilla Del PaperDocument6 pagesPlantilla Del Paper44david100% (1)
- El Ciclo Diesel IdealDocument4 pagesEl Ciclo Diesel IdealEdinson Delgado DiazNo ratings yet
- Enfermeria ComunitariaDocument10 pagesEnfermeria ComunitariaGabriela Vargas100% (1)
- Ejercicios Pep 1 (Resueltos)Document45 pagesEjercicios Pep 1 (Resueltos)Hugo HenriquezNo ratings yet
- Frecuencia de ProcesadorDocument1 pageFrecuencia de ProcesadorAnonymous uWMsOf8No ratings yet
- Formato 17 Plan de Acción-Control Simultáneo-SaneamientoDocument1 pageFormato 17 Plan de Acción-Control Simultáneo-SaneamientoJ Smithk UCNo ratings yet
- UNEPARDocument9 pagesUNEPAROscar GarcíaNo ratings yet
- Primer Examen Parcial de Poo 2022Document2 pagesPrimer Examen Parcial de Poo 2022Benjamin LopezNo ratings yet
- TraducidoDocument4 pagesTraducidoAmilkar PerezNo ratings yet
- Informe FinalDocument297 pagesInforme FinalBellaNavarroNo ratings yet
- Comprobante Vigencia Derechos 33958102304Document2 pagesComprobante Vigencia Derechos 33958102304Jesús MartínezNo ratings yet
- Instalación TecDren - V.2Document8 pagesInstalación TecDren - V.2emy murilloNo ratings yet
- Microscopia A Grandes Rasgos Tipos de MicrosDocument5 pagesMicroscopia A Grandes Rasgos Tipos de MicrosKarolayn MunozNo ratings yet
- Trabajo de Recoleccion de Aguas ServidasDocument34 pagesTrabajo de Recoleccion de Aguas ServidasBarinitas Calderas75% (4)
- Infografía MEGLDocument4 pagesInfografía MEGLMarx E LopezNo ratings yet
- 00 Libro RuedaDocument214 pages00 Libro RuedadiegormellaNo ratings yet
- Modelo de Desarrollo Propuestos de La CepalDocument11 pagesModelo de Desarrollo Propuestos de La CepalJackelin Ñaccha0% (1)
- Guía de Laboratorio Redes Opticas 02Document9 pagesGuía de Laboratorio Redes Opticas 02MAX FREDI QUISPE AGUILARNo ratings yet
- Desarmado de Camiones Cat 785d #82 #87Document2 pagesDesarmado de Camiones Cat 785d #82 #87juanvillalobos2022No ratings yet
- Sistemas Dinámicos en MatemáticasDocument58 pagesSistemas Dinámicos en MatemáticasIsmael ValverdeNo ratings yet
- Manual Usuario RegistradorDocument59 pagesManual Usuario Registradorruth evelin ccorisapra100% (1)
- CPM Pert2Document2 pagesCPM Pert2JANA חאנה MENDOZA GONZALEZNo ratings yet