You might also like
- Estimation of Gasoline-Engine Parameters Using Higher Order Sliding ModeDocument8 pagesEstimation of Gasoline-Engine Parameters Using Higher Order Sliding ModeenginehardwareNo ratings yet
- Mean Value Modelling of A S.i.: EngineDocument19 pagesMean Value Modelling of A S.i.: EnginesamarjitpatnaikNo ratings yet
- Engine CalibrationDocument8 pagesEngine CalibrationbiopoweredNo ratings yet
- 14 - Jmse 07 00138Document19 pages14 - Jmse 07 00138Ali ElmaihyNo ratings yet
- A Systematic Approach Towards Automated Control Design For Heavy-Duty EGR Diesel EnginesDocument6 pagesA Systematic Approach Towards Automated Control Design For Heavy-Duty EGR Diesel Engines11751175No ratings yet
- IFB103Document6 pagesIFB103Omnaath GupthaNo ratings yet
- Mathematical Modelling and Simulation of Spark Ignition Engine For Predicting Engine Performance CharacteristicsDocument5 pagesMathematical Modelling and Simulation of Spark Ignition Engine For Predicting Engine Performance CharacteristicsInnovative Research PublicationsNo ratings yet
- Brief Papers: Frequency-Domain Identification of Gas Turbine DynamicsDocument12 pagesBrief Papers: Frequency-Domain Identification of Gas Turbine DynamicsDiego CarpioNo ratings yet
- MatlabDocument47 pagesMatlabalkadyasNo ratings yet
- Full Vehicle Modelling For Cold Start Cycle Fuel Economy and Emissions PredictionDocument10 pagesFull Vehicle Modelling For Cold Start Cycle Fuel Economy and Emissions Predictionmina badratNo ratings yet
- UntitledDocument29 pagesUntitledTerryNo ratings yet
- Development and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil ApplicationsDocument10 pagesDevelopment and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil Applicationsarun kumarNo ratings yet
- Automotive Engine Hybrid Modelling and Control For Reduction of Hydrocarbon EmissionsDocument16 pagesAutomotive Engine Hybrid Modelling and Control For Reduction of Hydrocarbon EmissionsdraggonboyNo ratings yet
- Variable Camshaft Timing Engine ControlDocument12 pagesVariable Camshaft Timing Engine ControlAbinash PrabhuNo ratings yet
- C94e PDFDocument11 pagesC94e PDFPhotonsmart DxNo ratings yet
- Design and Optimization of A Throttle Body Assembly by CFD AnalysisDocument11 pagesDesign and Optimization of A Throttle Body Assembly by CFD Analysisbob loblawNo ratings yet
- Simulation of The Dynamics of A Marine Diesel EngineDocument16 pagesSimulation of The Dynamics of A Marine Diesel EngineFlorian DraguNo ratings yet
- WAID0-Time: Automotive Engine Modeling For Real Control ApplicationDocument6 pagesWAID0-Time: Automotive Engine Modeling For Real Control ApplicationDanson DavidNo ratings yet
- Engine AFR ModelDocument6 pagesEngine AFR ModelIkhwanul KhairiNo ratings yet
- 2015-SAE-Prediction of High Altitude Performance For UAV Engine PDFDocument6 pages2015-SAE-Prediction of High Altitude Performance For UAV Engine PDF128mansouriNo ratings yet
- Dynamic Modeling and Simulation On GE90 EngineDocument10 pagesDynamic Modeling and Simulation On GE90 EnginetheijesNo ratings yet
- Modeling of Wheels and TiresDocument8 pagesModeling of Wheels and TireswhereareyoudearNo ratings yet
- A Nonlinear Engine Model For Drivetrain System DevelopmentDocument5 pagesA Nonlinear Engine Model For Drivetrain System Developmentsf111No ratings yet
- Analysis of Gas Flow Path in A Gas TurbineDocument15 pagesAnalysis of Gas Flow Path in A Gas TurbineYashasCRNo ratings yet
- At Zero-Dimensional Combustion SimulationDocument4 pagesAt Zero-Dimensional Combustion SimulationAhmed Mohamed IbrahimNo ratings yet
- PX C 3894038Document7 pagesPX C 3894038Sharad JadhavNo ratings yet
- Stepped PistfonDocument12 pagesStepped PistfonSrikanth DesaiNo ratings yet
- Identification Techniques For Control Oriented Models of Internal Combustion EnginesDocument26 pagesIdentification Techniques For Control Oriented Models of Internal Combustion EnginesAndrés CeverisaeNo ratings yet
- J. David Powell, N.: P. Fekete, and Chen-Fang ChangDocument12 pagesJ. David Powell, N.: P. Fekete, and Chen-Fang Changdimoi6640No ratings yet
- Dynamic Simulation of IC Engine PDFDocument3 pagesDynamic Simulation of IC Engine PDFKannan MuthusamyNo ratings yet
- Acc 2014 6858933Document7 pagesAcc 2014 6858933mohammad ghaderzadehNo ratings yet
- A Dynamic Model For Automotive Engine Control AnalysisDocument7 pagesA Dynamic Model For Automotive Engine Control Analysisekitani6817No ratings yet
- Modeling of Variable Intake Valve Timing in SI EngineDocument15 pagesModeling of Variable Intake Valve Timing in SI EngineHuneza AtaNo ratings yet
- Multiple Input Multiple Output Model Predictive Contr - 2010 - IFAC ProceedingsDocument6 pagesMultiple Input Multiple Output Model Predictive Contr - 2010 - IFAC ProceedingsmuradbashirNo ratings yet
- Ptolemy Approach With Hybrid SystemsDocument1 pagePtolemy Approach With Hybrid SystemsAslan SessizNo ratings yet
- A New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkDocument15 pagesA New Automotive Air Conditioning System Simulation Tool Developed in MATLAB/SimulinkPrashant IngaleNo ratings yet
- Mathematical Optimization of Variable Valve Timing For Reducing Fuel Consumption of A Si EngineDocument9 pagesMathematical Optimization of Variable Valve Timing For Reducing Fuel Consumption of A Si EngineahmedNo ratings yet
- 2006 01 0884Document38 pages2006 01 0884Yosra RamadhanNo ratings yet
- Performance Prediction of A Faulty Marine Diesel Engine Under Dif-Ferent Governor SettingsDocument10 pagesPerformance Prediction of A Faulty Marine Diesel Engine Under Dif-Ferent Governor SettingswaleedyehiaNo ratings yet
- 17-2 Stroke Engine-Queens UniDocument10 pages17-2 Stroke Engine-Queens UnipeterNo ratings yet
- Design and Optmization of A Throttle BodyDocument11 pagesDesign and Optmization of A Throttle BodyRodrigo PassosNo ratings yet
- Investigating Diesel Engine Performance and Emissions Using CFDDocument10 pagesInvestigating Diesel Engine Performance and Emissions Using CFDmfmechanics2020No ratings yet
- Hedrick, 1989Document9 pagesHedrick, 1989Diep Hau ThanNo ratings yet
- Illustration of The Use of An Instructional Version of A Thermodynamic Cycle Simulation For A Commercial Automotive Spark-Ignition EngineDocument15 pagesIllustration of The Use of An Instructional Version of A Thermodynamic Cycle Simulation For A Commercial Automotive Spark-Ignition EngineJose Luis RattiaNo ratings yet
- Modelling of The Exhaust Gas RecirculationDocument15 pagesModelling of The Exhaust Gas RecirculationAdølfo BtzNo ratings yet
- Genetic-Fuzzy Model of Diesel Engine Working Cycle: M. Kekez and L. RadziszewskiDocument7 pagesGenetic-Fuzzy Model of Diesel Engine Working Cycle: M. Kekez and L. RadziszewskiJai SankarNo ratings yet
- Paper No.: 10 Multi-Model Adaptive Wastegate Control of A Large Medium-Speed EngineDocument7 pagesPaper No.: 10 Multi-Model Adaptive Wastegate Control of A Large Medium-Speed EngineAnonymous 8qUHG4SlNo ratings yet
- 00 - Theotokatos 2010 On The Cycle Mean Value Modelling of A Large Two Stroke Marine Diesel EngineDocument13 pages00 - Theotokatos 2010 On The Cycle Mean Value Modelling of A Large Two Stroke Marine Diesel EngineAli ElmaihyNo ratings yet
- FuelDocument30 pagesFuelrakhikishoreNo ratings yet
- 1989 Aker Predicting Gas Turbine Performance Degradation Due To Compressor Fouling Using Computer Simulation TechniquesDocument8 pages1989 Aker Predicting Gas Turbine Performance Degradation Due To Compressor Fouling Using Computer Simulation TechniquesArgenomSaubiNo ratings yet
- Full 2870Document14 pagesFull 2870danteNo ratings yet
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDocument14 pagesPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNo ratings yet
- San Tirso 2019Document51 pagesSan Tirso 2019Harihara sakthi sudhan mechNo ratings yet
- Idle Speed ComparisonDocument12 pagesIdle Speed ComparisonIkhwanul KhairiNo ratings yet
- Flow Simulation - CFD - & Fatigue Analysis - Fea - of A Centrifugal PumpDocument17 pagesFlow Simulation - CFD - & Fatigue Analysis - Fea - of A Centrifugal PumpIAEME PublicationNo ratings yet
- Turbofan Engine Control Design Using Robust Multivariable Control TechnologiesDocument10 pagesTurbofan Engine Control Design Using Robust Multivariable Control TechnologiesPeter MalatinNo ratings yet
- 04789342Document9 pages04789342Raees SwatiNo ratings yet
- How Much Does Traffic Congestion Increase Fuel ConDocument17 pagesHow Much Does Traffic Congestion Increase Fuel Consnehalthakare556No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Como Dibujar Animales BebesDocument19 pagesComo Dibujar Animales Bebesrcruces100% (10)
- Assign2 2006 PDFDocument4 pagesAssign2 2006 PDFKousik MandalNo ratings yet
- Russel - Photorealist Painting TechniquesDocument19 pagesRussel - Photorealist Painting TechniquesRobert SoloNo ratings yet
- Drawing Made Easy PDFDocument54 pagesDrawing Made Easy PDFNelson Nascimento100% (5)
- CrdiDocument2 pagesCrdiYash BelaniNo ratings yet
- GT6B FoundamentalDocument53 pagesGT6B FoundamentalThanapaet RittirutNo ratings yet
- Chry-45RFE VacTestDocument4 pagesChry-45RFE VacTestAnonymous WzR5h9g8VNo ratings yet
- Carburetor Adjustment and Its Importance in Bike Engine PerformanceDocument3 pagesCarburetor Adjustment and Its Importance in Bike Engine PerformancePuneeth KumarNo ratings yet
- Planned Maintenance ProgramDocument12 pagesPlanned Maintenance ProgramRajan BhandariNo ratings yet
- Robin EY20 Parts CatalogDocument36 pagesRobin EY20 Parts CatalogVictor Isaac Pasten Araya50% (6)
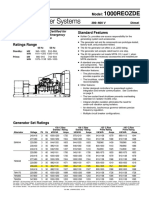
- 1000REOZDEDocument4 pages1000REOZDELanh TranNo ratings yet
- Introduction of Automobile or VehicleDocument2 pagesIntroduction of Automobile or VehiclePritam Kumar SinghNo ratings yet
- Honda Click 110 Service Manual EngDocument19 pagesHonda Click 110 Service Manual Engbigbavy000067% (6)
- Cat 3512 Sensor PositionDocument5 pagesCat 3512 Sensor PositionĐoàn Ngọc Đại86% (7)
- How To Keep Your Subaru AliveDocument470 pagesHow To Keep Your Subaru AlivePeter Milne100% (9)
- 0370 151 PVM y 002 01Document13 pages0370 151 PVM y 002 01sandeep pandeyNo ratings yet
- Electronic Ignition SystemDocument5 pagesElectronic Ignition SystemRicardo BanderasNo ratings yet
- Series: Use and Maintenance Uso E Manutenzione Utilisation Et Entretien Betrieb Und Wartung Uso Y MantenimientoDocument31 pagesSeries: Use and Maintenance Uso E Manutenzione Utilisation Et Entretien Betrieb Und Wartung Uso Y MantenimientoRasheed SiddiquiNo ratings yet
- Husaberg Fe 550-E 2007 MotorDocument28 pagesHusaberg Fe 550-E 2007 Motorjinxy06No ratings yet
- Yb08 2Document26 pagesYb08 2eemylNo ratings yet
- 2002 Sienna EcuimmobDocument14 pages2002 Sienna EcuimmobMiguel ruizNo ratings yet
- Elantra 2010 2.0LDocument85 pagesElantra 2010 2.0LRoger Ramirez100% (2)
- DB 01.01.26.04 Pump S200 SSDocument2 pagesDB 01.01.26.04 Pump S200 SSPRAMOD KUMARNo ratings yet
- PERKINS 1375-1880 kVA: Technical SpecificationsDocument2 pagesPERKINS 1375-1880 kVA: Technical SpecificationsAnamta KhanNo ratings yet
- Solid State Drives: Notes of Lesson PlanDocument24 pagesSolid State Drives: Notes of Lesson PlanetasureshNo ratings yet
- Elite 2500 1500 DBW Information PDFDocument1 pageElite 2500 1500 DBW Information PDFcristian4481400No ratings yet
- Engineparts: BF Engine Parts For HeavyweightsDocument4 pagesEngineparts: BF Engine Parts For HeavyweightsDaniNo ratings yet
- Cat 3116 Marine Spec Sheet AbbyDocument6 pagesCat 3116 Marine Spec Sheet AbbyJesus CaguaNo ratings yet
- DE165GCDocument2 pagesDE165GCHesham HusseinNo ratings yet
- Basic Mechanical Engineering Lab ManualDocument71 pagesBasic Mechanical Engineering Lab ManualseenuNo ratings yet
- Injector DC CalculatorDocument14 pagesInjector DC CalculatorFirdaus AbdullahNo ratings yet
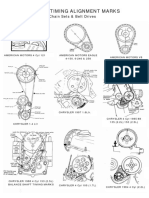
- Factory Timing MarksDocument6 pagesFactory Timing Marksvadi100% (3)
- Gen Set 2.5 KVA 1Document17 pagesGen Set 2.5 KVA 1Pankaj TiwariNo ratings yet
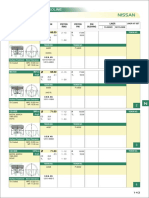
- Teikin Catalog-Automobile NISSANDocument36 pagesTeikin Catalog-Automobile NISSANBruno Andres Miranda Soto100% (7)