You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Art of Blues SolosDocument51 pagesThe Art of Blues SolosEnrique Maldonado100% (8)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 450i User ManualDocument54 pages450i User ManualThượng Lê Văn0% (2)
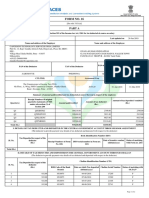
- Form16 2018 2019Document10 pagesForm16 2018 2019LogeshwaranNo ratings yet
- Noddy Goes To Toyland 1949Document71 pagesNoddy Goes To Toyland 1949janeprice100% (2)
- Big Data AnalyticsDocument31 pagesBig Data Analyticsjaneprice100% (1)
- Interoperability Standards For Voip Atm Components: Volume 4: RecordingDocument75 pagesInteroperability Standards For Voip Atm Components: Volume 4: RecordingjuananpspNo ratings yet
- FPGA Implementation of I C & SPI Protocols: A Comparative StudyDocument4 pagesFPGA Implementation of I C & SPI Protocols: A Comparative StudyjanepriceNo ratings yet
- 5 Star Hotels in Portugal Leads 1Document9 pages5 Star Hotels in Portugal Leads 1Zahed IqbalNo ratings yet
- Marine Lifting and Lashing HandbookDocument96 pagesMarine Lifting and Lashing HandbookAmrit Raja100% (1)
- GL 186400 Case DigestDocument2 pagesGL 186400 Case DigestRuss TuazonNo ratings yet
- GSM Door Control ArduinoDocument20 pagesGSM Door Control ArduinojanepriceNo ratings yet
- HC-SR04 Ultrasonic PDFDocument3 pagesHC-SR04 Ultrasonic PDFjanepriceNo ratings yet
- Optimizing The Implementation of SEC-DAEC Codes in FPGAsDocument5 pagesOptimizing The Implementation of SEC-DAEC Codes in FPGAsjanepriceNo ratings yet
- Scalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesDocument4 pagesScalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesjanepriceNo ratings yet
- HT9170B/HT9170D DTMF Receiver: FeaturesDocument14 pagesHT9170B/HT9170D DTMF Receiver: FeaturesjanepriceNo ratings yet
- Core E4Document5 pagesCore E4janepriceNo ratings yet
- Ultrasonic Ranging Module HC - SR04: Product FeaturesDocument3 pagesUltrasonic Ranging Module HC - SR04: Product FeaturesjanepriceNo ratings yet
- A Combined SDC-SDF Architecture For Normal I/O Pipelined Radix-2 FFTDocument5 pagesA Combined SDC-SDF Architecture For Normal I/O Pipelined Radix-2 FFTjanepriceNo ratings yet
- NMOS Pass Transistor: Transmission Gate Logic CircuitsDocument7 pagesNMOS Pass Transistor: Transmission Gate Logic CircuitsjanepriceNo ratings yet
- A Usb 2.0 C Processo Ontroller For An ARM7 or Implemented in FPG 7TDM-S GADocument4 pagesA Usb 2.0 C Processo Ontroller For An ARM7 or Implemented in FPG 7TDM-S GAjanepriceNo ratings yet
- Cache NptelDocument3 pagesCache NpteljanepriceNo ratings yet
- VHDL Implementation and Synthesis of Adaptive ThresholdingDocument72 pagesVHDL Implementation and Synthesis of Adaptive ThresholdingjanepriceNo ratings yet
- Power Estimation Compiler PDFDocument61 pagesPower Estimation Compiler PDFjanepriceNo ratings yet
- Data Acquisition in MATLAB PDFDocument30 pagesData Acquisition in MATLAB PDFjaneprice100% (1)
- Building and Other Construction Workers Act 1996Document151 pagesBuilding and Other Construction Workers Act 1996Rajesh KodavatiNo ratings yet
- Applied-Entrepreneurship PPTDocument65 pagesApplied-Entrepreneurship PPTJanice EscañoNo ratings yet
- Star Link SafetyDocument2 pagesStar Link SafetyJeronimo FernandezNo ratings yet
- Reflections On Free MarketDocument394 pagesReflections On Free MarketGRK MurtyNo ratings yet
- Pneumatic Fly Ash Conveying0 PDFDocument1 pagePneumatic Fly Ash Conveying0 PDFnjc6151No ratings yet
- Final ExamSOMFinal 2016 FinalDocument11 pagesFinal ExamSOMFinal 2016 Finalkhalil alhatabNo ratings yet
- SND Kod Dt2Document12 pagesSND Kod Dt2arturshenikNo ratings yet
- Role of The Government in HealthDocument6 pagesRole of The Government in Healthptv7105No ratings yet
- Use of EnglishDocument4 pagesUse of EnglishBelén SalituriNo ratings yet
- Newsletter 289Document10 pagesNewsletter 289Henry CitizenNo ratings yet
- Personal Best B1+ Unit 1 Reading TestDocument2 pagesPersonal Best B1+ Unit 1 Reading TestFy FyNo ratings yet
- TAS5431-Q1EVM User's GuideDocument23 pagesTAS5431-Q1EVM User's GuideAlissonNo ratings yet
- Accomplishment ReportDocument1 pageAccomplishment ReportMaria MiguelNo ratings yet
- Schmidt Family Sales Flyer English HighDocument6 pagesSchmidt Family Sales Flyer English HighmdeenkNo ratings yet
- Engine Diesel PerfomanceDocument32 pagesEngine Diesel PerfomancerizalNo ratings yet
- Building New Boxes WorkbookDocument8 pagesBuilding New Boxes Workbookakhileshkm786No ratings yet
- General Financial RulesDocument9 pagesGeneral Financial RulesmskNo ratings yet
- 3412C EMCP II For PEEC Engines Electrical System: Ac Panel DC PanelDocument4 pages3412C EMCP II For PEEC Engines Electrical System: Ac Panel DC PanelFrancisco Wilson Bezerra FranciscoNo ratings yet
- Brochure Ref 670Document4 pagesBrochure Ref 670veerabossNo ratings yet
- Forecasting of Nonlinear Time Series Using Artificial Neural NetworkDocument9 pagesForecasting of Nonlinear Time Series Using Artificial Neural NetworkranaNo ratings yet
- SM Land Vs BCDADocument68 pagesSM Land Vs BCDAelobeniaNo ratings yet
- RevisionHistory APFIFF33 To V219Document12 pagesRevisionHistory APFIFF33 To V219younesNo ratings yet
- What Caused The Slave Trade Ruth LingardDocument17 pagesWhat Caused The Slave Trade Ruth LingardmahaNo ratings yet