You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- R 02 Danieli Corus - Blast Furnace Cast HouseDocument11 pagesR 02 Danieli Corus - Blast Furnace Cast HouseSaptarshi Sengupta100% (1)
- Air Pressure Control Valves and Air Pressure Stabilisers: ProductsDocument1 pageAir Pressure Control Valves and Air Pressure Stabilisers: ProductshyreepktNo ratings yet
- ICU DesignDocument3 pagesICU DesignhyreepktNo ratings yet
- 100LF-Van Tran GioDocument1 page100LF-Van Tran GiohyreepktNo ratings yet
- Laboratory Space Pressurization Control Systems: Dale T. Hitchings, PE, CIHDocument12 pagesLaboratory Space Pressurization Control Systems: Dale T. Hitchings, PE, CIHhyreepktNo ratings yet
- Cauthang Van Tran Gio SdngliDocument1 pageCauthang Van Tran Gio SdnglihyreepktNo ratings yet
- Cauthang-Van Tran GioDocument1 pageCauthang-Van Tran GiohyreepktNo ratings yet
- 03-Tang 2-View1-50 PDFDocument1 page03-Tang 2-View1-50 PDFhyreepktNo ratings yet
- Barcol-Air Fan Coils 2008 PDFDocument28 pagesBarcol-Air Fan Coils 2008 PDFhyreepktNo ratings yet
- A0360106 PDFDocument6 pagesA0360106 PDFhyreepktNo ratings yet
- Nihon Spindle Cooling Towers Sdn. Bhd. (784210-D) : My International School, VietnamDocument1 pageNihon Spindle Cooling Towers Sdn. Bhd. (784210-D) : My International School, VietnamhyreepktNo ratings yet
- Digital 12-Month Subscription: Pressure Loss in Steel Pipes Schedule 40Document4 pagesDigital 12-Month Subscription: Pressure Loss in Steel Pipes Schedule 40hyreepktNo ratings yet
- s21 s22 s36 s47 s64Document2 pagess21 s22 s36 s47 s64hyreepktNo ratings yet
- S-4 Mounting Brackets Installation Procedures: Not Subjected To Physical Contact or Wind or Air Flow Conditions.)Document1 pageS-4 Mounting Brackets Installation Procedures: Not Subjected To Physical Contact or Wind or Air Flow Conditions.)hyreepktNo ratings yet
- RXS09 - 12DAVJU Installation ManualDocument8 pagesRXS09 - 12DAVJU Installation ManualhyreepktNo ratings yet
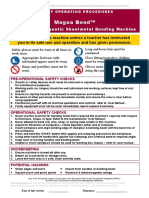
- Magna Bend SopDocument1 pageMagna Bend SopClarkKent Fabro Batucan0% (1)
- HMS - EVO - ST - M00964Document4 pagesHMS - EVO - ST - M00964Nguyễn Thống NhấtNo ratings yet
- Specifications - Hexagonal Boron Nitride (HBN 10 and HBN 20)Document1 pageSpecifications - Hexagonal Boron Nitride (HBN 10 and HBN 20)Israel ExporterNo ratings yet
- Assignment 1Document33 pagesAssignment 1KHÁNH VÕ ĐĂNGNo ratings yet
- 19P602 - Jigs, Fixture and Die Design: Design of Plastic Injection MouldsDocument56 pages19P602 - Jigs, Fixture and Die Design: Design of Plastic Injection Moulds21P410 - VARUN MNo ratings yet
- Cutting and Installing Crown MoldingDocument5 pagesCutting and Installing Crown Moldingcaliangel1No ratings yet
- Marshall AS100DDocument2 pagesMarshall AS100DBarry StoveNo ratings yet
- 14.Stress-Strain Relationship in Axial Compression For EPS ConcreteDocument7 pages14.Stress-Strain Relationship in Axial Compression For EPS ConcreteManuel GutarraNo ratings yet
- RSPRODocument14 pagesRSPROFaber Andres Vidal RuizNo ratings yet
- Automation & Sanitization: OmnilogicDocument5 pagesAutomation & Sanitization: OmnilogicJoni MoonNo ratings yet
- Concrete Volute PumpsDocument8 pagesConcrete Volute PumpsvijayunityNo ratings yet
- Service Manual Fuller Heavy Duty Frfro Transmissions Trsm2400 Eaton FullerDocument196 pagesService Manual Fuller Heavy Duty Frfro Transmissions Trsm2400 Eaton FullerCristian Muñoz100% (10)
- Rajasthan Pollution Control Board RSPCB JEE 2016 Paper - RemovedDocument19 pagesRajasthan Pollution Control Board RSPCB JEE 2016 Paper - RemovedMuzaffar RatherNo ratings yet
- Beasy Corrosion SimulationDocument106 pagesBeasy Corrosion SimulationPeter GeorgeNo ratings yet
- GlobalXPE Teco PDFDocument4 pagesGlobalXPE Teco PDFcelectricNo ratings yet
- Impact of Solid On Health and EnvDocument5 pagesImpact of Solid On Health and EnvAbiodun OnadejiNo ratings yet
- 20160323014501-20MnCr5 - 20MnCrS5Document1 page20160323014501-20MnCr5 - 20MnCrS5singaravelan narayanasamyNo ratings yet
- Separation Using Membrane - Water&oilDocument4 pagesSeparation Using Membrane - Water&oilsasiNo ratings yet
- AST - Fixed Roof DesignDocument23 pagesAST - Fixed Roof DesignAntony Bruno Genewin100% (2)
- Book 1Document22 pagesBook 1Arpit ShuklaNo ratings yet
- CHAPTER 3 FINAL PAPER AirconDocument8 pagesCHAPTER 3 FINAL PAPER Airconjohanna faith israelNo ratings yet
- ICSE Class 10 Chemistry 2004Document7 pagesICSE Class 10 Chemistry 2004SACHIDANANDA SNo ratings yet
- Rampur Hydro Electric Project ReportDocument16 pagesRampur Hydro Electric Project ReportNawang NegiNo ratings yet
- Pheonwj M Spe 0025 1Document48 pagesPheonwj M Spe 0025 1Iksan Adityo Mulyo100% (1)
- Oxygen CorrosionDocument8 pagesOxygen CorrosionGovind kumarNo ratings yet
- Raftfoundations LABC PDFDocument1 pageRaftfoundations LABC PDFErnie ErnieNo ratings yet
- Is 12791 1989 - High Carbon-Chromium Bearing SteelDocument10 pagesIs 12791 1989 - High Carbon-Chromium Bearing SteelVismay kumar. NNo ratings yet
- NTC 10D 15x MayloonDocument1 pageNTC 10D 15x MayloonBábáRafaelTyErinléNo ratings yet