You might also like
- Optimal Robust Controller Design For The Ball and Plate SystemDocument4 pagesOptimal Robust Controller Design For The Ball and Plate SystemAra DisNo ratings yet
- Modelling and Control of Ball-Plate SystemDocument22 pagesModelling and Control of Ball-Plate SystemJisoo UmNo ratings yet
- Trajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerDocument6 pagesTrajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerAyushman BaruaNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- Dieu Khien He Thong Bi Trong Tu TruongDocument5 pagesDieu Khien He Thong Bi Trong Tu TruongNinhĐứcThànhNo ratings yet
- Genetic Algorithm Based Optimal Control For A 6-DOF Non Redundant Stewart ManipulatorDocument7 pagesGenetic Algorithm Based Optimal Control For A 6-DOF Non Redundant Stewart ManipulatorEdith GranadosNo ratings yet
- An Application of Robust Feedback Linearization To A Ball and Beam Control ProblemDocument5 pagesAn Application of Robust Feedback Linearization To A Ball and Beam Control ProblemE Daniel ReyesNo ratings yet
- Ball and Hoop2Document0 pagesBall and Hoop2Parameswararao BillaNo ratings yet
- Ball & Beam DocumentDocument14 pagesBall & Beam DocumentJorge PorrasNo ratings yet
- Design of Optimal Controllers For A Ball & Beam SystemDocument10 pagesDesign of Optimal Controllers For A Ball & Beam SystemGRD JournalsNo ratings yet
- BallonbeamDocument22 pagesBallonbeamYuan HuNo ratings yet
- Application of Intelligent Controller in A Ball and Beam Control SystemDocument16 pagesApplication of Intelligent Controller in A Ball and Beam Control SystemjerrythaNo ratings yet
- Robust Control For A Delta RobotDocument6 pagesRobust Control For A Delta Robotjuanpereza21No ratings yet
- Selby Trapp Final ReportDocument28 pagesSelby Trapp Final ReportothmanNo ratings yet
- Nonlinear Model & Controller Design For Magnetic Levitation System-IsPRADocument5 pagesNonlinear Model & Controller Design For Magnetic Levitation System-IsPRAIshtiaq AhmadNo ratings yet
- Lab 07Document2 pagesLab 07reza66No ratings yet
- AHRS LabDocument12 pagesAHRS Labjoshimeet479No ratings yet
- Feedback Linearization and Notch Filter For A Magnetic Levitation System (MagLev)Document7 pagesFeedback Linearization and Notch Filter For A Magnetic Levitation System (MagLev)Luca MaggioriNo ratings yet
- Controller Design of Inverted Pendulum Using Pole Placement and LQRDocument7 pagesController Design of Inverted Pendulum Using Pole Placement and LQRInternational Journal of Research in Engineering and Technology100% (1)
- Backstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemDocument5 pagesBackstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemAlfian MaarifNo ratings yet
- C 11.3-D BUILDING Compatibility ModeDocument18 pagesC 11.3-D BUILDING Compatibility ModejojomarbunNo ratings yet
- Robust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDocument6 pagesRobust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDandro-LinkNo ratings yet
- Ee 469Document39 pagesEe 469arwa zeglamNo ratings yet
- The Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WuDocument6 pagesThe Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WunguyendattdhNo ratings yet
- Spacecraft Formation Flying ControlDocument6 pagesSpacecraft Formation Flying ControlJuan Manuel MauroNo ratings yet
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDocument9 pagesRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNo ratings yet
- Design and Experiment of A 3DOF Parallel Micro-Mechanism Utilizing Flexure HingesDocument6 pagesDesign and Experiment of A 3DOF Parallel Micro-Mechanism Utilizing Flexure HingesOlgy MarinescuNo ratings yet
- A Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation SystemsDocument8 pagesA Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation Systemsankurgoel1975No ratings yet
- Ball & Beam DocumentDocument8 pagesBall & Beam DocumentJorge PorrasNo ratings yet
- Optimal Control of Double Inverted Pendulum Using LQR ControllerDocument4 pagesOptimal Control of Double Inverted Pendulum Using LQR ControllerSachin SharmaNo ratings yet
- A Comparative Study of Fuzzy Logic and Classical Control With EPICSDocument6 pagesA Comparative Study of Fuzzy Logic and Classical Control With EPICSGanesh NhivekarNo ratings yet
- Robust Control of Active Vehicle Suspension Systems Using Sliding Modes and Differential Flatness With MATLABDocument18 pagesRobust Control of Active Vehicle Suspension Systems Using Sliding Modes and Differential Flatness With MATLABAVALDERNo ratings yet
- THRD PD 29febDocument7 pagesTHRD PD 29febvijay_marathe01No ratings yet
- Modeling and Control of Active Suspension Using Pismc and SMCDocument10 pagesModeling and Control of Active Suspension Using Pismc and SMCjulioandres2011No ratings yet
- Networked Nonlinear Model Predictive Control of The Ball and Beam SystemDocument5 pagesNetworked Nonlinear Model Predictive Control of The Ball and Beam SystemdiegoNo ratings yet
- Hard Disk Drive Servo ControlDocument20 pagesHard Disk Drive Servo ControlMohammad IkhsanNo ratings yet
- Moasaa 08Document6 pagesMoasaa 08Manh Nguyen TienNo ratings yet
- Перко циклыDocument28 pagesПерко циклыНиколай ФедуновNo ratings yet
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 pagesControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rNo ratings yet
- AB Robust Report PendulumInverted1Document16 pagesAB Robust Report PendulumInverted1Sebastian ReyesNo ratings yet
- Teaching 560 945 1527689633Document17 pagesTeaching 560 945 1527689633Mahmood AbuZaidNo ratings yet
- Teaching 560 945 1527689633Document17 pagesTeaching 560 945 1527689633Mahmood AbuZaidNo ratings yet
- m4l30 Lesson 30 The Direct Stiffness Method: Plane FramesDocument23 pagesm4l30 Lesson 30 The Direct Stiffness Method: Plane FramesVitor Vale100% (1)
- Chapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDocument14 pagesChapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDivya Dev C MNo ratings yet
- Design of Robust Fuzzy Controllers For Aerospace ApplicationsDocument5 pagesDesign of Robust Fuzzy Controllers For Aerospace ApplicationsRitesh SinghNo ratings yet
- Prediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationDocument8 pagesPrediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationHadhoud MécaniqueNo ratings yet
- Esign For A: AbstractDocument5 pagesEsign For A: Abstractsattanic666No ratings yet
- MCT Question BankDocument5 pagesMCT Question BankKalamchety Ravikumar SrinivasaNo ratings yet
- Lecture 1: Preliminary CommentsDocument5 pagesLecture 1: Preliminary CommentsRavi Harish MaulanaNo ratings yet
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerDocument6 pagesModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerRonald CaravacaNo ratings yet
- Observer-Based ControlDocument6 pagesObserver-Based ControlKadir CumaliNo ratings yet
- Controlengg Compiled Sridar (Session 1 8)Document60 pagesControlengg Compiled Sridar (Session 1 8)Prem T RajuNo ratings yet
- Robust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementDocument6 pagesRobust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementinfodotzNo ratings yet
- Modelling and Control of Ball-Plate System PDFDocument22 pagesModelling and Control of Ball-Plate System PDFsolid34100% (1)
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- Loop Shapind Design ProcedureDocument4 pagesLoop Shapind Design ProcedureRitesh SinghNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
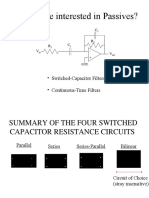
- Why Are We Interested in Passives?: - Switched-Capacitor Filters - Continuous-Time FiltersDocument5 pagesWhy Are We Interested in Passives?: - Switched-Capacitor Filters - Continuous-Time FiltersGiang TepNo ratings yet
- Slau 318Document20 pagesSlau 318fasterfoxNo ratings yet
- Power Supply Noise Reduction (Power Supply Noise Reduction) (2004)Document12 pagesPower Supply Noise Reduction (Power Supply Noise Reduction) (2004)Silvio DelijaNo ratings yet
- Optimizing C&C++ Compiler V 4.1 BetaDocument160 pagesOptimizing C&C++ Compiler V 4.1 Betaduythuc_lqdNo ratings yet
- Ballonplate MechatronicsDocument12 pagesBallonplate MechatronicsGiang TepNo ratings yet
- EMI and Layout FundamentalsDocument38 pagesEMI and Layout Fundamentalsapi-3719969100% (1)
- Vehicle Stability Dean KarnoppDocument332 pagesVehicle Stability Dean KarnoppRed-Kan0% (1)
- ProjectDocument1 pageProjectGiang TepNo ratings yet
- @team Building and Project ManagementDocument262 pages@team Building and Project ManagementGiang TepNo ratings yet
- @team Building and Project ManagementDocument262 pages@team Building and Project ManagementGiang TepNo ratings yet
- Voltage Drop Calculator - AlbanyDocument17 pagesVoltage Drop Calculator - AlbanyWonbae ChoiNo ratings yet
- Motor Fundamentals: 1. Stepper MotorsDocument2 pagesMotor Fundamentals: 1. Stepper MotorsGiang TepNo ratings yet
- For More Explanation See The Example.: So That's Why We Need To Install A Starter With A Motor........Document1 pageFor More Explanation See The Example.: So That's Why We Need To Install A Starter With A Motor........Giang TepNo ratings yet
- AN857 BLDC Motor Control Made Easy (Microchip)Document48 pagesAN857 BLDC Motor Control Made Easy (Microchip)Carlos Iván RuedaNo ratings yet
- Developing ListeningDocument24 pagesDeveloping ListeninggildejcaduNo ratings yet
- EPA Consensus Project Paper Accuracy of Photogrammetry Devices Intraoral Scanners and Conventional Techniques For The Full Arch Implant Impressions A Systematic ReviewDocument12 pagesEPA Consensus Project Paper Accuracy of Photogrammetry Devices Intraoral Scanners and Conventional Techniques For The Full Arch Implant Impressions A Systematic Reviewcasto.carpetasmiaNo ratings yet
- Rosca Ciprian Application Form EB 11-12Document20 pagesRosca Ciprian Application Form EB 11-12Ciprian RoscaNo ratings yet
- ArrrcccllmmmDocument5 pagesArrrcccllmmmNicole BeltranNo ratings yet
- Final Presentation For The Research Congress 2022Document23 pagesFinal Presentation For The Research Congress 2022Nassr RyhanNo ratings yet
- Sources of Sales Force RecruitmentDocument8 pagesSources of Sales Force RecruitmentTanya Patel50% (2)
- Beyond Boredom and Anxiety by Mihaly CsikszentmihalyiDocument264 pagesBeyond Boredom and Anxiety by Mihaly CsikszentmihalyiSunny Talwar100% (3)
- Evaluation of Nutrient Uptake and Nutrient-Use Efficiency of SRI and Conventional Rice Cultivation Methods in MadagascarDocument5 pagesEvaluation of Nutrient Uptake and Nutrient-Use Efficiency of SRI and Conventional Rice Cultivation Methods in Madagascarmote34No ratings yet
- Topic 7 - Building Powerful Marketing PlanDocument42 pagesTopic 7 - Building Powerful Marketing PlanAgnes TeoNo ratings yet
- Supplier Selection Criteria in Vietnam: A Case Study in Textile and Apparel IndustryDocument30 pagesSupplier Selection Criteria in Vietnam: A Case Study in Textile and Apparel IndustryHuỳnh Minh Gia HàoNo ratings yet
- Program Schedule Phase 2Document2 pagesProgram Schedule Phase 2priya dharshiniNo ratings yet
- Analysis of A Split-Split-Plot Experiment: Ijkl L I Il J Ij Ijl K Ik JK Ijk IjklDocument2 pagesAnalysis of A Split-Split-Plot Experiment: Ijkl L I Il J Ij Ijl K Ik JK Ijk IjklMochammad Fachrouzi IskandarNo ratings yet
- Sustainable Fashion - Current and Future Reserach DirectionsDocument37 pagesSustainable Fashion - Current and Future Reserach DirectionsLam WEn SiangNo ratings yet
- Market Share-A Key To ProfitabilityDocument20 pagesMarket Share-A Key To ProfitabilityAnkur GoelNo ratings yet
- 7 Numerical Methods 3 Newton Raphson and Second OrderDocument19 pages7 Numerical Methods 3 Newton Raphson and Second OrderCarl PNo ratings yet
- Jurnal Cindy BDocument6 pagesJurnal Cindy Bmegawati manengkeyNo ratings yet
- DopeDocument30 pagesDopeAlyssa NavarroNo ratings yet
- Leuven University Press - The Artistic Turn A Manifesto - 2013-08-08Document3 pagesLeuven University Press - The Artistic Turn A Manifesto - 2013-08-08Lixo Electronico100% (1)
- PHD Thesis On Strategic Management PDFDocument5 pagesPHD Thesis On Strategic Management PDFowynqovcf100% (2)
- Tips For Structuring Better Brainstorming Sessions - InspireUXDocument7 pagesTips For Structuring Better Brainstorming Sessions - InspireUXJonathan Bates0% (1)
- Assignment - Week 10Document6 pagesAssignment - Week 10Nabella Roma DesiNo ratings yet
- Jawaban QnaDocument2 pagesJawaban QnaIvana YustitiaNo ratings yet
- Project Profile Information FormDocument2 pagesProject Profile Information Formgeza_szabo5001No ratings yet
- Research 1Document33 pagesResearch 1Margaret GalangNo ratings yet
- Textbook Economic Development 12Th Edition Full ChapterDocument41 pagesTextbook Economic Development 12Th Edition Full Chaptervirginia.carmona601100% (25)
- Epidemiology & Health Information: NU1103 Tara Brookes @tarapb8Document40 pagesEpidemiology & Health Information: NU1103 Tara Brookes @tarapb8smartisaacNo ratings yet
- Dawkins - A Case Study in The Roots of MoralityDocument2 pagesDawkins - A Case Study in The Roots of MoralityMichael SmithNo ratings yet
- APQC - InsuranceDocument1,214 pagesAPQC - InsurancecasoreyNo ratings yet
- FS 2 Episode 16Document3 pagesFS 2 Episode 16Christian Elorde67% (3)
- MMS/M06 Management Training and Development Paper: HRM403 Time: Three Hours Maximum Marks: 70 All Questions Carry Equal MarksDocument4 pagesMMS/M06 Management Training and Development Paper: HRM403 Time: Three Hours Maximum Marks: 70 All Questions Carry Equal Marksvikizza100% (1)