Professional Documents
Culture Documents
Soluções Fundamentais para Barras em Mísula Pela Analogia Da Viga Conjugada
Uploaded by
Daniela Araujo Alves FernandesOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Soluções Fundamentais para Barras em Mísula Pela Analogia Da Viga Conjugada
Uploaded by
Daniela Araujo Alves FernandesCopyright:
Available Formats
Departamento de Engenharia Civil
SOLUES FUNDAMENTAIS PARA BARRAS EM MSULA PELA
ANALOGIA DA VIGA CONJUGADA
Aluna: Paula de Castro Sonnenfeld Vilela
Orientador: Luiz Fernando Martha
1 Introduo
A metodologia de anlise de estruturas reticuladas (estruturas compostas por barras) pelo Mtodo dos Deslocamentos faz uma superposio de solues cinematicamente determinadas
[1,2,3]. Essas solues so configuraes deformadas elementares da estrutura sendo analisada. Dentro dessa metodologia, uma configurao deformada elementar isola um determinado
efeito ou parmetro que representa o comportamento cinemtico (deformado) da estrutura.
Cada configurao deformada elementar uma soluo fundamental no contexto do Mtodo
dos Deslocamentos. Nesse contexto, uma soluo fundamental de uma estrutura reticulada
composta de configuraes deformadas elementares das suas barras isoladas.
As solues fundamentais para uma barra isolada correspondem a reaes de engastamento
perfeito para a barra submetida solicitao externa (cargas atuando, variao de temperatura,
etc.) e a coeficientes de rigidez local, que so as foras e momentos que devem atuar nas extremidades da barra para impor deslocamentos ou rotaes, isoladamente, nas extremidades
da barra. Todas essas solues podem ser obtidas a partir de parmetros fundamentais que
so momentos de engastamento perfeito de barra isolada submetida a carregamentos externos
e coeficientes de rigidez rotao (momentos que devem atuar nas extremidades da barra para impor rotaes nas extremidades da barra).
Os parmetros fundamentais para barras com seo transversal constante so conhecidas e
encontradas em qualquer livro texto de anlise de estruturas [1,2]. Entretanto, no existem
solues analticas fechadas para momentos de engastamento perfeito e coeficientes de rigidez rotao para barras com seo transversal varivel (vigas em msula).
Este projeto de Iniciao Cientfica apresenta uma metodologia para determinao dessas solues fundamentais para barras que tm seo transversal varivel (msula reta) para o comportamento transversal de flexo em regime elstico-linear. Nesse contexto, se considera que
os deslocamentos so pequenos e que o material tem um comportamento elstico-linear, isto
, o material segue a Lei de Hooke.
O mtodo apresentado neste artigo baseado na analogia da viga conjugada, tambm conhecida como Processo de Mohr [4]. Essa metodologia resulta em integrais cujos integrandos
correspondem a uma diviso de polinmios, que no caso geral no tem soluo analtica fechada. Neste trabalho essas integrais so resolvidas numericamente atravs de uma integrao de Gauss implementada adaptativamente para obter uma preciso numrica adequada.
O artigo est organizado da seguinte maneira. Ainda na Introduo, a prxima sub-seo define todos os parmetros envolvidos no comportamento estrutural de uma barra flexo e estabelece a conveno de sinais adotada. Na seo 2, so definidos os coeficientes de rigidez
flexo para barras isoladas. O objetivo mostrar que todos os coeficientes de rigidez local,
no caso mais geral de barras com seo transversal varivel, podem ser deduzidos em funo
de poucos parmetros de rigidez. Estes so os chamados parmetros fundamentais que sero
resolvidos pela analogia da viga conjugada. A seo 3 define as reaes momento de engastamento, que servem como base para determinao de todas as outras reaes para o compor-
Departamento de Engenharia Civil
tamento flexo de uma forma geral. A seo 4 faz um resumo da Teoria de Vigas de Navier, que corresponde ao modelo estrutural adotado para a idealizao do comportamento de
barras flexo. Esse assunto bsico para a anlise de estruturas e pode ser encontrado em
qualquer livro texto de Resistncia dos Materiais. Esse resumo est sendo apresentado neste
artigo apenas para mostrar as expresses diferencias que so utilizadas para estabelecer a analogia da viga conjugada, o que feito na seo 0. A seo 6 mostra a determinao dos parmetros fundamentais de rigidez flexo pela analogia da viga conjugada. A seo 7 mostra a
determinao de reaes momento de engastamento para barras isoladas submetidas a um carregamento transversal linearmente distribudo. A seo 8 descreve as funes computacionais
que foram implementadas como resultado do desenvolvimento deste trabalho. Finalmente, na
seo 0 so feitas concluses sobre o trabalho e sugestes para continuao em trabalhos futuros.
1.1
Parmetros envolvidos e conveno de sinais
Para definir os parmetros envolvidos no comportamento estrutural de uma barra flexo,
adotado um sistema de coordenadas locais para a barra, tal como indicado na Figura 1, sendo:
l comprimento
da barra.
y, v
Seo transversal
y
x
CG
dx
l
Figura 1 Sistema de eixos locais de uma barra.
Na Figura 1, o eixo axial da barra, x, passa pelos centros de gravidade (CG) das sees transversais e os outros eixos so transversais barra. Portanto, est sendo considerado que existe
uma linha reta (o eixo x) que passa pelos CGs de todas as sees transversais ao longo da
barra.
Com base nesse sistema de coordenadas, so definidos os deslocamentos e rotaes que os
pontos do eixo de uma barra de um prtico plano podem ter:
v(x ) deslocamento
transversal (positivo na direo de y);
(x ) rotao da seo transversal por flexo (positivo no sentido anti-horrio em
torno do eixo z).
Os deslocamentos transversais v(x) de uma barra definem uma curva chamada elstica. Os
sentidos positivos do deslocamento transversal v(x) (positivo na direo do eixo local y) e da
rotao por flexo (x) (positiva no sentido anti-horrio) esto indicados na Figura 2, onde a
elstica est indicada pela linha tracejada desenhada em uma escala ampliada exageradamente.
Figura 2 Elstica de uma viga em balano com deslocamento transversal e rotao indicados
com seus sentidos positivos.
Departamento de Engenharia Civil
Se por um lado o deslocamento transversal v(x) e a rotao (x) so os parmetros cinemticos que definem a configurao deformada de uma barra na flexo, por outro lado os parmetros que definem os esforos na barra so (veja Figura 3):
q(x ) taxa de carregamento
distribudo transversal ao eixo da barra;
Q(x ) esforo
cortante (esforo interno transversal), positivo quando entrando pela esquerda
for na direo de y, ou quando entrando pela direita for contrrio a y;
M(x ) momento
fletor (esforo interno de flexo), positivo quando traciona as fibras
inferiores da seo transversal;
VA fora
transversal externa que atua na extremidade inicial de uma barra (positiva na
direo de y);
M A momento
de externo que atua na extremidade inicial de uma barra (positivo no sentido
anti-horrio);
VB fora
transversal externa que atua na extremidade final de uma barra (positiva na direo
de y);
M B momento
de externo que atua na extremidade final de uma barra (positivo no sentido
anti-horrio).
q
y
q(x)
VA
MA
M + dM
MB
VB
Q + dQ
dx
dx
Figura 3 Direes positivas adotadas para carga distribuda transversal, esforos internos e
esforos externos nas extremidades de uma barra para o comportamento flexo.
Complementando os parmetros que definem o comportamento de uma barra flexo, tem-se:
E mdulo de elasticidade do material;
A rea da seo transversal da barra;
I=
y 2 dA momento de inrcia da seo transversal em relao ao eixo z.
2 Coeficientes de rigidez local flexo
As mais importantes solues fundamentais de barra isolada so os chamados coeficientes de
rigidez local ou de barra. No presente contexto, coeficientes de rigidez de barra so foras e
momentos que devem atuar nas extremidades da barra isolada, paralelamente aos seus eixos
locais, para equilibr-la quando uma deslocabilidade (deslocamento ou rotao) imposta,
isoladamente, em uma das suas extremidades. A seguinte notao utilizada, conforme mostrado na Figura 4:
d deslocabilidade de barra no sistema local: deslocamento, na direo de um dos eixos
locais x ou y, ou rotao em uma extremidade de uma barra isolada.
Departamento de Engenharia Civil
k ij coeficiente de rigidez de barra no sistema local: fora ou momento que deve atuar em
uma extremidade de uma barra isolada, na direo da deslocabilidade di , para equilibrla quando a deslocabilidade unitria dj = 1 imposta, isoladamente, em uma das suas
extremidades.
O significado fsico dos coeficientes de rigidez de barra de prtico plano no sistema local
mostrado na Figura 4. Essa figura indica, no seu topo, a configurao deformada de uma barra isolada e o conjunto de foras e momentos que atuam nas extremidades da barra, paralelamente a seus eixos locais, para equilibr-la nessa configurao. Essas foras e momentos so
definidos como:
f i fora generalizada de barra no sistema local: fora ou momento que atua na direo da
deslocabilidade di de uma barra para equilibr-la quando isolada.
Como indica a Figura 4, a configurao deformada de uma barra pode ser decomposta em
configuraes deformadas elementares. A partir dessa superposio, as foras generalizadas
da barra so obtidas pela soma das foras e momentos que equilibram a barra para cada uma
das configuraes deformadas elementares.
y
d1
f 2
f 1
d4
d3
d2
f 5
f 4
f 3
d 5
x
k 41 d1
k 11 d1
f 6
d6
k 14 d4
k 44 d 4
d1
d4
k 55 d 5
k 22 d2
d 2
k 32 d2
k 23 d3
d 3
k 62 d 2
k 35 d5
k 52 d2
k 25 d5
d 3
k 63
k 26 d6
k 53 d3
k 36 d6
d 5
k 65
d 5
k 66 d 6
d6
k 33 d3
k 56 d6
Figura 4 Superposio de configuraes deformadas elementares para compor a elstica
final de uma barra de prtico plano isolada.
Observa-se na Figura 4 o desacoplamento entre os efeitos axiais e transversais de flexo de
uma barra. As deformadas elementares axiais provocadas por d1 e d4 no mobilizam os coeficientes de rigidez de flexo (foras na direo transversal ou momentos). Da mesma forma,
as deformadas elementares transversais de flexo provocadas por d2 , d3 , d5 e d6 no mobilizam coeficientes de rigidez axiais. Devido a esse desacoplamento, alguns coeficientes de rigidez locais so nulos. Neste artigo, apenas os efeitos transversais de flexo esto sendo considerados.
A superposio de configuraes deformadas elementares mostrada na Figura 4 resulta em
uma relao entre cada fora nodal generalizada f i e as deslocabilidades da barra. Por exem-
Departamento de Engenharia Civil
plo, a fora total f 1 obtida pela soma das foras axiais na extremidade inicial da barra, re d1 + k14 d4 . Analogamente, a fora total f 2 obtida pela soma das foras
sultando em: f 1 = k11
transversais na extremidade inicial da barra, resultando em: f 2 = k22 d2 + k23 d3 + k25 d5 + k26 d6 . Generalizando para todas as foras e momentos que atuam nas extremidades da barra, pode-se
escrever a seguinte relao matricial:
f 1 k 11
f 0
2
f 3 0
=
f 4 k 41
f 5 0
f 6 0
k 22
k 32
k 23
k 33
0
k 52
k 62
k 53
k 63
k 14
0
0
k 44
0
0
0
k 25
k 35
0
k 55
k 65
0 d1
d 2
k 26
d 3
k 36
0 d 4
k 56 d 5
k 66 d6
(1)
A Equao (1) tambm pode ser escrita de uma forma condensada:
{f } = [k ] {d} .
(2)
Sendo:
{f } vetor das foras generalizadas de barra no sistema local: conjunto de foras e
momentos que atuam nas extremidades de uma barra (nas direes dos eixos locais)
para equilibr-la quando isolada.
[k] matriz de rigidez de uma barra no sistema local: matriz dos coeficientes de rigidez local
kij nas direes dos eixos locais.
{d} vetor das deslocabilidades de barra no sistema local: conjunto de deslocabilidades de
uma barra nas direes dos eixos locais.
Duas observaes podem ser feitas quanto matriz de rigidez da barra isolada. A primeira
que pelo Teorema de Maxwell [1,5] a matriz simtrica, isto :
k ji = kij .
(3)
A segunda observao vem da superposio de configuraes deformadas elementares mostrada na Figura 4. Observa-se que os coeficientes de rigidez que correspondem a uma dada
configurao deformada elementar tm o mesmo ndice j. Pode-se dizer ento:
A j-sima coluna da matriz de rigidez [k] de uma barra no seu sistema local corresponde
ao conjunto de foras generalizadas que atuam nas extremidades da barra, paralelamente
a seus eixos locais, para equilibr-la quando imposta uma configurao deformada tal
que dj = 1 (deslocabilidade dj com valor unitrio e as demais deslocabilidades com valor nulo).
O Princpio dos Deslocamentos Virtuais pode ser utilizado para deduzir os valores dos coeficientes de rigidez de uma barra prismtica, isto , uma barra com uma seo transversal uniforme ao longo de seu comprimento [3]. Na seo 5 apresentada a analogia da viga conjugada como uma metodologia para determinao de coeficientes de rigidez para barras no
prismticas.
Existem parmetros de rigidez rotao (Figura 5) que so considerados fundamentais, na
medida em que todos os coeficientes de rigidez local flexo podem ser deduzidos a partir
deles. Esses parmetros so definidos como [2]:
Departamento de Engenharia Civil
KA
A = 1
K B t BA
K A t AB
KB
B = 1
Figura 5 Parmetros fundamentais de rigidez rotao de uma barra.
K A coeficiente de rigidez rotao na extremidade inicial: momento que deve atuar na
extremidade inicial de uma barra isolada para impor uma rotao unitria A = 1 na
extremidade inicial enquanto todas as outras deslocabilidades so mantidas nulas.
t AB coeficiente de transmisso de momento da extremidade inicial para a extremidade final:
parmetro que estabelece a relao entre o a coeficiente de rigidez K A e o momento que
necessrio atuar na extremidade final para impor uma rotao A = 1 na extremidade
inicial enquanto todas as outras deslocabilidades so mantidas nulas. O momento na
extremidade final sempre tem o mesmo sentido do momento K A .
K B coeficiente de rigidez rotao na extremidade final: momento que deve atuar na
extremidade final de uma barra isolada para impor uma rotao unitria B = 1 na
extremidade final enquanto todas as outras deslocabilidades so mantidas nulas.
t BA coeficiente de transmisso de momento da extremidade final para a extremidade inicial:
parmetro que estabelece a relao entre o a coeficiente de rigidez K B e o momento que
necessrio atuar na extremidade inicial para impor uma rotao B = 1 na extremidade
final enquanto todas as outras deslocabilidades so mantidas nulas. O momento na
extremidade inicial sempre tem o mesmo sentido do momento K B .
Embora quatro parmetros fundamentais sejam apresentados, na verdade apenas trs seriam
necessrios, pois pela Equao (3) deduz-se que K A t AB = K B t BA , e portanto [2]:
K A t BA
=
.
K B t AB
(4)
Optou-se por trabalhar com quatro parmetros, ao invs de trs reduzidos pela Equao (4),
para manter uma simetria entre as expresses que relacionam os coeficientes de rigidez local
flexo com os parmetros fundamentais de rigidez rotao.
As expresses para todos os coeficientes da matriz de rigidez da barra, com ou sem articulao, podem ser deduzidas diretamente com base nos parmetros fundamentais de rigidez
rotao [3].
Conforme mencionado, os valores do parmetros fundamentais de rigidez rotao para uma
barra com uma seo transversal uniforme ao longo de seu comprimento tm expresso analtica fechada. Eles podem ser deduzidos, por exemplo, pelo Princpio dos Deslocamentos Virtuais [3]:
K A = KB =
4EI
;
l
(5)
1
.
2
(6)
t AB = t BA =
Entretanto, no existem solues analticas fechadas para esses parmetros para barras com
seo transversal varivel. Na seo 6 apresentada a analogia da viga conjugada como uma
metodologia para determinao dos parmetros fundamentais de rigidez para barras no prismticas.
Departamento de Engenharia Civil
3 Reaes de engastamento de barra isolada
Esta seo define as solues fundamentais de engastamento perfeito de barras isoladas para
cargas transversais linearmente distribudas aplicadas. Procedimentos anlogos podem ser
feitos para outros tipos de solicitaes.
A Figura 6 mostra a notao e os sentidos positivos das reaes de engastamento perfeito para
um carregamento transversal linearmente distribudo, em que:
fi reao de engastamento perfeito de barra no sistema local: reao fora ou momento
que atua na direo da deslocabilidade local di de uma barra com as extremidades fixas
para equilibr-la quando atua uma solicitao externa.
y
qA
x
q( x ) = q A 1 + q B
l
l
qB
q(x)
f6
x
f3
f5
f2
l
Figura 6 Notao e sentidos positivos de reaes de engastamento perfeito flexo para
uma barra isolada com carga transversal linearmente distribuda.
Para cada tipo de solicitao externa, possvel definir dois parmetros fundamentais dos
quais todas as reaes de engastamento perfeito de uma barra isolada:
momento de engastamento na extremidade inicial: reao momento que atua na
M
A
extremidade inicial de uma barra com as extremidades fixas para equilibr-la quando
atua uma solicitao externa
momento de engastamento na extremidade final: reao momento que atua na
M
B
extremidade final de uma barra com as extremidades fixas para equilibr-la quando atua
uma solicitao externa
A Figura 7 mostra a superposio de efeitos que utilizada para determinar as reaes de engastamento da barra biengastada em funo dos parmetros fundamentais para uma carga
transversal linearmente distribuda. Cada parcela dessa superposio isola o efeito das reaes momentos fundamentais e o efeito do carregamento distribudo, ambos atuando na viga
com apoios simples (biapoiada). A seguinte notao vai ser adotada:
V A0 reao fora transversal na extremidade inicial da barra biapoiada para a solicitao
externa.
V B0 reao fora transversal na extremidade final da barra biapoiada para a solicitao
externa.
Departamento de Engenharia Civil
qB
qA
f3 = M
A
f2
M
A
+M
M
A
B
l
f5
l
qA
M
B
+M
M
A
B
l
f6 = M
B
q l q l
V A0 = A + B
3
6
qB
q l q l
V B0 = A + B
6
3
Figura 7 Superposio de efeitos para determinar reaes de engastamento de uma barra
com carga transversal linearmente distribuda em funo dos parmetros fundamentais.
As reaes de engastamento f3 e f6 saem diretamente das reaes momentos fundamentais.
As reaes f2 e f5 (foras transversais) podem ser determinadas pela superposio das reaes foras devidas s reaes momentos fundamentais com as reaes foras devidas ao carregamento atuando na barra biapoiada. Isso resulta em:
;
f3 = M
A
(7)
;
f6 = M
B
(8)
+M
M
B
f2 = A
+ V A0 ;
l
(9)
+M
M
B
f5 = A
+ VB0 .
l
(10)
Sendo, para o caso da carga transversal linearmente distribuda:
q l q l
V A0 = A B ;
3
6
(11)
q l q l
VB0 = A B .
6
3
(12)
Assim como existem solues analticas fechadas para os parmetros fundamentais de rigidez
rotao, possvel obter expresses fechadas para os parmetros fundamentais de reao de
engastamento para uma barra com uma seo transversal constante [3]:
2
2
= q A l qB l ;
M
A
20
30
(13)
2
2
= + q A l + qB l .
M
B
30
20
(14)
De mesma forma, no existem solues analticas fechadas para esses parmetros para barras
com seo transversal varivel. Uma possvel metodologia para resolver esse problema vai
ser apresentada na seo 7.
Departamento de Engenharia Civil
4 Idealizao do comportamento de barras flexo
A anlise estrutural de estruturas reticuladas (cujos elementos estruturais podem ser considerados como barras, isto , peas estruturais que tm uma dimenso bem maior do que as outras duas) est fundamentada na concepo de um modelo matemtico, aqui chamado de modelo estrutural, que adota hipteses sobre o comportamento das barras.
O comportamento de vigas flexo foi formalizado no incio do sculo 19 por Navier (17851836). Ele estabeleceu um conjunto de relaes diferenciais de equilbrio e compatibilidade
que fazem parte dessa formalizao, a chamada Teoria de Vigas de Navier. Esta seo faz um
resumo das principais relaes dessa teoria. Essas relaes so bsicas para a anlise de estruturas reticuladas e podem ser encontradas em vrios livros-texto sobre o assunto. O resumo aqui mostrado est baseado nos trabalhos dos seguintes autores: Fodosiev [6], Beer &
Johnston [7], Timoshenko & Gere [8], White et al. [1] e West [9]. A Figura 8 faz um resumo
de todas as expresses associadas a essa teoria, mostrando o seu relacionamento.
A Teoria de Vigas de Navier est fundamentada em quatro hipteses bsicas. A primeira
considera que os deslocamentos so pequenos em relao altura da seo transversal da barra. A segunda hiptese despreza deformaes provocadas por efeitos de cisalhamento (esforos cortantes). A terceira a hiptese de manuteno das sees transversais planas quando
a viga se deforma, proposta originalmente por Jacob Bernoulli (1654-1705). De acordo com
as segunda e terceira hipteses, as sees transversais de uma viga que se deforma flexo
permanecem planas e normais ao eixo deformado da viga. Como ltima hiptese, considerado que o material tem um comportamento elstico-linear, isto , o material segue a Lei de
Hooke.
O modelo estrutural tem como premissa uma condio de continuidade dos campos de deslocamentos e deformaes no interior das barras. Essa condio de continuidade forada quase que automaticamente quando s se admitem deformaes contnuas para as barras. Alm
disso, os campos deslocamentos e deformaes tm que ser compatveis entre si, isto , os
deslocamentos e deformaes de uma barra devem estar associados. Considerando que os
deslocamentos so pequenos, pode-se aproximar a rotao da seo transversal pela tangente
da elstica. Dessa forma, pode-se associar o deslocamento transversal rotao da seo
transversal em uma equao que tambm considerada uma equao de compatibilidade:
=
dv
.
dx
(15)
A hiptese de manuteno das sees transversais planas garante uma continuidade de deslocamentos no interior de uma barra que sofre flexo, pois cada seo transversal permanece
encaixada com as suas adjacentes. Esta condio de compatibilidade pode ser resumida na
Equao (16) que relaciona o momento fletor em uma seo transversal da barra com a curvatura da barra, que pode ser aproximada por d2v/dx2 no caso de pequenos deslocamentos [8,1]:
d 2 v M( x )
=
.
dx 2 EI ( x )
(16)
A Equao (16) considerada uma relao diferencial de compatibilidade, mas tambm engloba, no nvel de um elemento infinitesimal de barra, a lei constitutiva do material (relao
tenso-deformao) e o equilbrio entre tenses normais e momento fletor (veja Figura 8).
Essa equao considera o caso geral de momento de inrcia I varivel ao longo da barra.
Departamento de Engenharia Civil
TEORIA DE VIGAS DE NAVIER
Parmetros envolvidos:
Hipteses bsicas:
E mdulo de elasticidade do material
A rea da seo transversal
dA rea infinitesimal de uma fibra da seo
transversal
I = y 2 dA momento de inrcia da seo
transversal em relao ao eixo z
q taxa de carregamento distribudo transversal
ao eixo da barra (positiva na direo de y)
Q esforo cortante (positivo quando entrando
pela esquerda for na direo de y, ou quando
entrando pela direita for contrrio a y)
M momento fletor (positivo quando traciona as
fibras inferiores da seo transversal)
v deslocamento transversal (positivo na direo
de y)
rotao da seo transversal por flexo
(positiva no sentido anti-horrio)
d rotao relativa interna por flexo de um
elemento infinitesimal de barra
variao de comprimento de uma fibra
genrica dada por y
xf deformao normal na direo longitudinal de
uma fibra devida ao efeito de flexo
xf tenso normal na direo longitudinal da
barra devida ao efeito de flexo
(a) Deslocamentos so pequenos em relao s
dimenses da seo transversal.
(b) Despreza-se deformaes por cisalhamento
(barras longas, isto , comprimento bem
maior do que a altura da seo).
(c) Sees transversais permanecem planas e
normais ao eixo da barra quando esta se
deforma (Hiptese de Bernoulli).
(d) Material tem comportamento elstico-linear
(Lei de Hooke).
y, v
q(x)
x
dx
Pequenos deslocamentos:
tan( )
dv
= (x )
dx
Deformao do elemento infinitesimal:
d
d y
y
dx
Equilbrio do elemento infinitesimal:
dx
xf =
CG
dA
d
xf =
y
dx
dx
Relao tenso vs.
deformao:
xf = E xf
xf =
xf (y )
Seo transversal
y
d2 v
y
dx 2
x
Q + dQ
O
d
y 2 dA
A
dx
dx
Equilbrio entre momento fletor e
tenses normais:
d
xf = E
y
dx
M=
Fy = 0
( y ) xf dA
MO = 0
M + dM
-y
d
M=
(y ) E
y dA
dx
A
M = E
M = EI
d
dx
d 2 v M( x)
=
dx 2 EI (x )
Equao de Navier:
d2v
EI
(
x
)
= q( x )
dx 2
Figura 8 Resumo da Teoria de Vigas de Navier.
10
dM
= Q(x )
dx
d2 M
= q( x )
dx 2
d2
dx 2
M
d =
dx
EI
dQ
= q(x )
dx
d 4 v q( x ) (momento
=
de inrcia
EI constante)
dx 4
Departamento de Engenharia Civil
O modelo matemtico adotado para a representao do comportamento de estruturas reticuladas considera que as condies de equilbrio devem ser satisfeitas para a estrutura como um
todo, para cada barra ou n isolado, ou para qualquer poro isolada na estrutura. Isto inclui o
equilbrio de um elemento infinitesimal de barra.
O equilbrio de foras no elemento infinitesimal na direo vertical, considerando as direes
positivas mostradas na Figura 3, resulta em:
Fy = 0
dQ
= q( x ) .
dx
(17)
O equilbrio de momentos em relao ao ponto O no canto inferior esquerdo do elemento infinitesimal (Figura 8), desprezando os termos de ordem superior, fornece a seguinte relao:
MO = 0
dM
= Q( x ) .
dx
(18)
As Equaes (17) e (18) podem ser combinadas, resultando em uma relao de equilbrio entre o momento fletor em uma seo e a taxa de carregamento transversal distribudo:
d2M
= q( x ) .
dx 2
(19)
A Teoria de Vigas de Navier estabelece uma equao diferencial que relaciona os deslocamentos transversais v(x) de uma viga com a taxa de carregamento distribudo transversalmente q(x), desprezando deformaes devidas ao efeito cortante. A deduo dessa equao est
indicada na Figura 8. Considerando o caso geral de momento de inrcia I varivel ao longo
da barra, tem-se:
d2
d2v
EI
(
x
)
= q( x ) .
dx 2
dx 2
(20)
No caso em que a barra prismtica (momento de inrcia I da seo transversal constante ao
longo da barra), tem-se:
d 4 v q( x )
=
.
EI
dx 4
(21)
A Equao (20), ou a sua outra verso (21) para inrcia constante, chamada de Equao de
Navier. Essa equao engloba, no nvel de um elemento infinitesimal de barra, todas as condies que o modelo estrutural tem que atender: condies de compatibilidade entre deslocamentos, rotaes e deformaes, lei constitutiva do material, condies de equilbrio entre
carregamento transversal distribudo, esforo cortante e momento fletor, e condies de equilbrio entre tenses normais e momento fletor.
Pode-se ainda considerar a relao que existe entre o deslocamento transversal e o esforo
cortante em uma barra, que obtida pelas Equaes (18) e (16), considerando EI constante:
d 3 v Q( x )
=
.
EI
dx 3
11
(22)
Departamento de Engenharia Civil
5 Analogia da viga conjugada
Esta seo apresenta a Analogia da Viga Conjugada como uma metodologia para deduzir solues fundamentais de vigas. Essa metodologia para anlise de vigas est baseada em uma
comparao entre as equaes diferenciais de equilbrio e de compatibilidade que regem o
comportamento de barras flexo. Essas equaes foram mostradas seo anterior e esto
reproduzidas na Tabela 1 de forma comparativa.
A analogia entre as equaes diferenciais foi observada inicialmente por Mohr (1835-1918), e
por isso esse mtodo conhecido como Processo de Mohr [4].
Tabela 1 Comparao entre equaes diferenciais de equilbrio e
compatibilidade para flexo de vigas.
Equaes de
Equaes de
Equilbrio
Compatibilidade
dM
= Q(x )
dx
Eq. (18)
dv
= (x )
dx
Eq. (15)
d2M
= q( x )
dx 2
Eq. (19)
d 2 v M( x )
=
dx 2 EI ( x )
Eq. (16)
Nota-se na Tabela 1 que o papel que M(x) faz nas equaes de equilbrio o mesmo que o
papel que v(x) exerce nas equaes de compatibilidade, isto , M(x) anlogo a v(x). Observa-se tambm que Q(x) anlogo a (x ) e q(x) a M(x)/EI(x).
A idia original de Mohr em explorar essa analogia est em utilizar as equaes de compatibilidade da viga real como se fossem equaes de equilbrio de uma viga fictcia, chamada de
viga conjugada, com carregamento qC(x) = M(x)/EI(x), esforo cortante QC(x) = (x ) e momento fletor MC(x) = v(x), tal como indica a Tabela 2.
Com base nessa analogia, a resoluo do problema do equilbrio da viga conjugada
equivalente resoluo do problema da compatibilidade da viga real. Como a imposio de
condies de equilbrio , em geral, mais simples e intuitiva do que a imposio de condies
de compatibilidade, a analogia da viga conjugada se apresenta como uma alternativa para a
imposio de condies de compatibilidade em vigas.
Tabela 2 Analogia da viga conjugada.
VIGA REAL
VIGA CONJUGADA
Carregamento
q(x)
qC(x) = M(x)/EI(x)
Esforo cortante
Q(x)
QC(x) = (x )
Momento fletor
M(x)
MC(x) = v(x)
Rotao
(x )
Deslocamento transversal
v(x)
A analogia da viga conjugada tem diversas aplicaes na anlise de vigas. As principais so:
Clculo de deslocamentos em vigas.
12
Departamento de Engenharia Civil
Anlise de vigas hiperestticas.
Deduo de coeficientes de rigidez de barras isoladas.
Determinao de reaes de engastamento de vigas para carregamentos arbitrrios.
Todas essas aplicaes podem ser analisadas utilizando o Princpio dos Trabalhos Virtuais
(PTV) [3]. Entretanto, a analogia da viga conjugada uma alternativa mais simples de ser
utilizada em muitos casos, e tambm muito til quando a viga tem uma rigidez flexo varivel, isto , quando EI no constante. As sees seguintes deste artigo mostram a determinao dos parmetros fundamentais de rigidez flexo e de reaes de engastamento para barras
isoladas.
A aplicao da analogia da viga conjugada requer a converso das restries de apoio da viga
real para a viga conjugada. As restries de apoio, que so condies de compatibilidade da
viga real, so expressas em termos de deslocamentos transversais v e de rotaes . Na viga
conjugada, as restries relativas a deslocamentos transversais devem ser convertidas para
restries com respeito a momentos fletores MC, assim como as restries que se referem a
rotaes so traduzidas para restries impostas a esforos cortantes QC. A Tabela 3 mostra a
converso das possveis restries de apoio em vigas (reais) para as correspondentes restries de apoio na viga conjugada em termos de momentos fletores e esforos cortantes.
Na Tabela 3, os recalques de apoio impostos na viga real tm o sentido positivo, de acordo
com a conveno de sinais adotada: deslocamento transversal v positivo de baixo para cima
e rotao positiva no sentido anti-horrio. Os correspondentes momentos fletores MC e
esforos cortantes QC tambm so positivos na viga conjugada. Dessa forma, quando um recalque vertical positivo imposto na viga real, o momento que aplicado na viga conjugada
faz com que as fibras inferiores fiquem tracionadas na seo de aplicao (isso corresponde a
um momento fletor positivo). Analogamente, quando uma rotao positiva imposta como
recalque de apoio na viga real, a fora aplicada na viga conjugada provoca um esforo cortante positivo na seo de aplicao.
Para se analisar uma viga pela analogia da viga conjugada, deve-se adotar a seguinte seqncia de procedimentos:
1 Converso de restries de apoio da viga real para a viga conjugada conforme indicado
na Tabela 3.
2 Determinao do diagrama de momentos fletores da viga real parametrizado pelos valores dos momentos fletores nas extremidades das barras.
3 Determinao do carregamento na viga conjugada, qC(x) = M(x)/EI(x). A considerao
de barras com rigidez flexo EI varivel (inrcia varivel) ao longo do comprimento
da viga considerada no carregamento da viga conjugada.
4 Imposio de condies de equilbrio da viga conjugada. Isso equivale a impor condies de compatibilidade da viga real.
13
Departamento de Engenharia Civil
Tabela 3 Converso de restries da apoio para a viga conjugada.
VIGA REAL
VIGA CONJUGADA
apoio simples
v=0
apoio simples
MC = 0
engaste
v=0
extremidade livre
MC = 0
=0
extremidade livre
v0
QC = 0
engaste
MC
QC 0
engaste deslizante
engaste deslizante
v0
QC 0
MC 0
=0
v=
QC = 0
MC =
apoio simples com
recalque vertical
apoio simples com
momento aplicado
v=
MC =
MC
v=
engaste com
recalque vertical
=
extremidade livre com
momento aplicado
v=
MC =
QC =
=
engaste com
recalque rotao
extremidade livre com
fora aplicada
=
apoio simples interno
QC =
QCesq
esq = dir
MC
v=0
rtula interna
esq dir
MC 0
= QCdir
QCesq
esq = dir
descontinuidade de
deslocamento
transversal
descontinuidade de
rotao
rtula interna
=0
QCesq QCdir apoio simples interno
v0
apoio simples interno
com recalque vertical
QCdir
rtula interna com
momento aplicado
v=
MC =
MC =
MC =
momento aplicado
v =
QC =
=
fora aplicada
6 Determinao dos parmetros fundamentais de rigidez flexo
Uma aplicao importante da analogia da viga conjugada a determinao de coeficientes de
rigidez flexo de barras. Conforme visto na seo 2, todos os coeficientes de rigidez flexo de uma barra podem ser deduzidos com base nos parmetros fundamentais de rigidez
rotao K A , t AB , K B e t BA . A Figura 9 mostra a determinao de K A e t AB . Essa figura mostra uma viga biengastada com uma rotao A = imposta no sentido anti-horrio na extremidade inicial da viga. O que se deseja determinar so os momentos M A = K A e
MB = K A t AB de devem atuar nas extremidades inicial e final, respectivamente, para impor
essa configurao deformada.
14
Departamento de Engenharia Civil
VIGA REAL
VIGA CONJUGADA
A =
MA
qC(x) = M(x)/EI(x)
MA/EI(0)
A
MB
MB/EI(l)
l
l
vA = 0
A = +
MB = 0
C
QB = 0
QA = +
Diagrama de momentos fletores:
MA
MA = 0
vB = 0
B = 0
Fy = 0
(x ) dx + = 0
M CA = 0
+MB
M(x)
q
0
( x ) x dx = 0
Figura 9 Clculo de parmetros de rigidez rotao da extremidade inicial de viga
biengastada.
A soluo de uma viga hiperesttica pela analogia da viga conjugada fica facilitada se o aspecto do diagrama de momentos fletores da viga real for determinado a priori. A Figura 9
indica os sinais dos momentos fletores nas extremidades com base nos momentos MA e MB,
admitindo por hiptese que eles so positivos, isto , que eles tm o sentido anti-horrio (conveno para momentos externos). Na extremidade inicial o momento fletor negativo pois a
fibras de cima esto tracionadas e na extremidade final o momento fletor positivo pois as
fibras de baixo esto tracionadas. O resultado disso o diagrama de momentos fletores com
uma variao linear que est indicado na viga real da Figura 9. Na viga conjugada, isso resulta em um carregamento distribudo qC(x) = M(x)/EI(x) (vide Tabela 2), que no caso geral de
momento de inrcia varivel no tem uma variao linear.
A criao da viga conjugada requer a converso das condies de contorno em termos de deslocamentos e rotao da viga real para condies de contorno em termos de momentos fletores e esforos cortantes na viga conjugada. A traduo dessas condies de contorno est
mostrada na Figura 9 e segue o que est indicado na Tabela 3. As duas extremidades da viga
conjugada esto livres (sem apoio) e aparece uma fora aplicada com valor para cima na
extremidade inicial pois o esforo cortante na extremidade inicial tem que ser QCA = + .
Uma observao importante que a viga conjugada hiposttica. sempre assim: uma viga
real hiperesttica acarreta em uma viga conjugada hiposttica. Isso indica que a viga real
hiperesttica tem infinitas solues que satisfazem as condies de compatibilidade isoladamente, assim como tem infinitas solues que satisfazem as condies de equilbrio isoladamente (existem infinitos possveis valores de MA e MB que satisfazem as equaes de equilbrio da viga real). A soluo correta aquela que satisfaz simultaneamente as condies de
equilbrio e de compatibilidade. Com base na analogia da viga conjugada, a soluo correta
aquela que satisfaz as condies de equilbrio na viga conjugada pois estas substituem as condies de compatibilidade na viga real. Como a viga conjugada hiposttica, o carregamento
da viga conjugada tem que ser auto-equilibrado pois no existem vnculos externos suficientes
para garantir o equilbrio em uma estrutura hiposttica.
Existem duas condies de equilbrio na viga conjugada para garantir que o seu carregamento
seja auto-equilibrado:
15
Departamento de Engenharia Civil
=0
( x ) dx + = 0 ;
(23)
q C ( x ) x dx = 0 .
(24)
C
A
=0
l
0
A Equao (23) impe que o somatrio das foras verticais na viga conjugada seja nulo e a
Equao (24) impe que o somatrio dos momentos em relao ao ponto A na viga conjugada
seja nulo. Essas duas condies formam um sistema de duas equaes a duas incgnitas que
suficiente para determinar os momentos MA e MB.
Para determinar este sistema de equaes, de forma a explicitar os valores de MA e MB, conveniente decompor o diagrama de momentos fletores da Figura 9 em duas parcelas lineares,
uma dependente s de MA e outra dependente s de MB, tal como mostrado na Figura 10:
MA
MA
x
M( x ) = M A 1
l
MB
x
MB
x
M( x ) = M B
l
Figura 10 Parcelas do diagrama de momentos fletores que isolam os efeitos dos momentos
aplicados nas extremidades.
x
M( x ) = M A 1 ;
l
(25)
x
M( x ) = M B .
l
(26)
O diagrama de momentos fletores finais na viga biengastada obtido pela soma das Equaes
(25) e (26). Substituindo essas duas expresses nas Equaes (23) e (24), resulta em:
dx M A +
EI ( x )
(x / l ) 1
l
0
(x / l) x dx M
2
EI ( x )
x /l
dx M B + = 0 ;
0 EI ( x )
x 2 / l
dx M B = 0 .
0 EI ( x )
(27)
(28)
A soluo do sistema de equaes formado pelas Equaes (27) e (28) leva aos valores de MA
e MB. Dessa forma, chega-se aos valores dos parmetros de rigidez rotao K A e t AB :
KA =
t AB =
MA
(29)
MB
.
MA
(30)
A determinao dos parmetros fundamentais de rigidez rotao K B e t BA feita de maneira
anloga, tal como indicado na Figura 11. As duas equaes de equilbrio na viga conjugada
so:
16
Departamento de Engenharia Civil
C
A
=0
( x ) dx = 0 ;
(31)
q C ( x ) x dx l = 0 .
(32)
=0
l
0
Utilizando a mesma decomposio do diagrama de momentos na viga real mostrada na Figura
10, chega-se no sistema de equaes de equilbrio que permitem a determinao nos momentos nas extremidades da barra isolada:
dx M A +
EI ( x )
(x / l ) 1
(x / l) x dx M
EI ( x )
x /l
dx M B = 0 ;
0 EI ( x )
(33)
x 2 / l
dx M B l = 0 .
0 EI ( x )
(34)
VIGA REAL
VIGA CONJUGADA
B =
MA
MA/EI(0)
MB
MB/EI(l)
qC(x) = M(x)/EI(x)
l
l
vA = 0
A = 0
Diagrama de momentos fletores:
MA
Fy = 0
M(x)
MB = 0
C
QB = +
M CA = 0
MA = 0
C
QA = 0
vB = 0
B = +
q
0
(x ) dx = 0
+MB
( x ) x dx l = 0
Figura 11 Clculo de parmetros de rigidez rotao da extremidade final de viga
biengastada.
A soluo do sistema de equaes formado pelas Equaes (33) e (34) leva aos valores de MA
e MB. Isso permite determinar os parmetros de rigidez rotao K B e t BA :
KB =
t BA =
MB
(35)
MA
.
MB
(36)
Observa-se que a metodologia apresentada resulta em integrais cujos integrandos correspondem a uma diviso de polinmios, que no caso geral no tem soluo analtica fechada. Neste
trabalho, essas integrais so resolvidas numericamente atravs de uma integrao de Gauss
implementada adaptativamente para obter uma preciso numrica adequada. Utiliza-se uma
funo de interpolao Lagrangeana cbica para descrever a variao do momento de inrcia
da seo transversal em x. Como o momento de inrcia varia cubicamente com a altura da
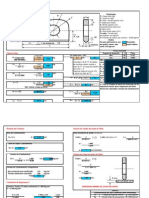
seo transversal, isso corresponde ao caso de msula reta. A Figura 12 indica os valores de
amostragem que foram adotados na interpolao Lagrangeana do momento de inrcia ao lon-
17
Departamento de Engenharia Civil
go da barra. Quatro valores so amostrados (I0=IA, I1, I2 e I3=IB): no incio da barra, a um tero
do vo, a dois teros do vo e no final da barra. Os valores intermedirios (I1 e I2) so calculados com base nos valores das alturas intermedirias (h1 e h2) da seo transversal, que por
sua vez so obtidas por interpolao linear (msula reta) dos valores das alturas da seo nas
extremidades (h0=hA e h3=hB).
h2
h1
h0=hA
I2
I1
I0=IA
h3=hB
I3=IB
x1
x1 = l/3
x2
x2 = 2l/3
l
Figura 12 Msula reta com variao cbica do momento de inrcia ao longo de uma barra
com msula reta (altura da seo transversal variando linearmente).
Com base na metodologia descrita nesta seo para calcular os parmetros fundamentais de
rigidez flexo, foi implementada uma funo em C (RotStiffCoef) que est descrita na seo 8. A implementao considera uma barra com variao cbica do momento de inrcia da
seo transversal.
Alguns resultados obtidos por esta implementao so comparados com tabelas atribudas a
Guldan apresentadas por Sssekind [2]. Essas tabelas contm valores para os parmetros
fundamentais de vigas em msula com seo transversal retangular. As Tabelas 4 e 5 comparam os valores calculados pela presente metodologia [vc] com os mostrados por Sssekind [2]
para vigas em msula reta com valores da relao IB/IA variando de 1,000 a 0,005. Os valores
dos coeficientes de rigidez rotao (KA e KB) so mostrados de forma adimensional multiplicados por l/(E IB). Os valores do coeficiente de transmisso de momentos (tAB) tambm so
mostrados de forma adimensional multiplicados por KA l/(E IB). Valores para o outro coeficiente de transmisso de momentos (tBA) podem ser obtidos com base na relao K A t AB = K B t BA
vide equao (4).
Tabela 4 Parmetros fundamentais de rigidez rotao para vigas em msula reta com seo
transversal retangular (IB/IA variando de 1,000 a 0,150).
IB/IA
1,000
0,900
0,800
0,700
0,600
0,500
0,400
0,300
0,200
0,150
KA l/(E IB)
[vc]
4,00
4,33
4,73
5,23
5,87
6,74
7,99
9,94
13,55
16,90
KA l/(E IB)
[2]
4,00
4,30
4,74
5,23
5,88
6,74
7,99
9,94
13,55
16,90
KB l/(E IB)
[vc]
4,00
4,11
4,23
4,38
4,55
4,77
5,05
5,44
6,05
6,54
KB l/(E IB)
[2]
4,00
4,08
4,24
4,38
4,55
4,77
5,05
5,44
6,05
6,54
tAB KA l/(E IB)
[vc]
2,00
2,11
2,24
2,39
2,58
2,83
3,17
3,67
4,50
5,22
tAB KA l/(E IB)
[2]
2,00
2,08
2,25
2,39
2,58
2,83
3,17
3,67
4,51
5,22
18
Departamento de Engenharia Civil
Tabela 5 Parmetros fundamentais de rigidez rotao para vigas em msula reta com seo
transversal retangular (IB/IA variando de 0,120 a 0,005).
IB/IA
0,120
0,100
0,080
0,060
0,050
0,040
0,030
0,020
0,010
0,005
KA l/(E IB)
[vc]
20,07
23,11
27,48
34,37
39,63
47,19
59,17
81,51
141,57
247,26
KA l/(E IB)
[2]
20,07
23,11
27,43
34,37
39,63
47,20
59,17
81,51
141,57
247,26
KB l/(E IB)
[vc]
6,94
7,29
7,74
8,38
8,81
9,37
10,15
11,37
13,85
16,93
KB l/(E IB)
[2]
6,94
7,29
7,68
8,38
8,81
9,37
10,15
11,37
13,85
16,93
tAB KA l/(E IB)
[vc]
5,85
6,42
7,20
8,35
9,17
10,29
11,95
14,76
21,22
30,59
tAB KA l/(E IB)
[2]
5,85
6,42
7,14
8,35
9,17
10,29
11,95
14,76
21,22
30,59
Observa-se nessa comparao que as diferenas entre os resultados atuais e os apresentados
por Sssekind so mnimas, demonstrando que a presente metodologia est correta. A vantagem da presente metodologia que ela calcula numericamente os parmetros fundamentais de
rigidez para qualquer valor da relao IB/IA e para qualquer forma de seo transversal (no s
a retangular).
7 Determinao de reaes momento de engastamento para carregamento transversal
linearmente distribudo
Outra aplicao importante da analogia da viga conjugada a determinao dos momentos
e M
de engastamento perfeito nas extremidades de barras submetidas a cargas arbitrM
A
B
rias. A Figura 13 mostra o diagrama de momentos fletores de uma viga (real) biengastada
submetida a um carregamento linearmente distribudo, sendo a taxa de carregamento distribudo no incio da barra igual a qA e a taxa no final igual a qB.
Assim como foi feito na seo anterior, conveniente decompor o diagrama de momentos
fletores na viga de forma a explicitar os valores de M A e M B . Alm disso, o efeito da carga
distribuda tambm separado no diagrama. Conforme indica a Figura 13, o digrama de momentos fletores dividido em duas parcelas lineares, uma dependente s de M A e outra dependente s de M B , e em uma parcela cbica Mq(x), que corresponde ao polinmio do terceiro grau resultante da carga linearmente distribuda atuando na viga biapoiada (apoios articulados):
x 1 + M
x + M ( x ) ;
M( x ) = M
A
B
q
l
l
M q (x ) =
qB q A 3 q A 2 2 q A l + qB l
x +
x
x .
6l
2
6
19
(37)
(38)
Departamento de Engenharia Civil
M
A
M
B
qA
qB
l
x 1 + M
x + M ( x )
M(x) = M
A
B
q
l
M
A
x
M(x)
M
B
M
A
M
A
x 1
M( x ) = M
A
l
M
B
x
M
B
x
M( x ) = M
B
l
q A l qB l
+
6
3
q A l qB l
+
3
6
qA
qB
x
qB q A 3 q A 2 2 q A l + qB l
x +
x
x
6l
2
6
M q (x) =
Figura 13 Diagrama de momentos fletores de viga (real) biengastada para uma carga
linearmente distribuda.
Para determinar os valores de M A e M B pela analogia da viga conjugada, necessrio converter as condies de contorno em termos de deslocamentos e rotao da viga real para condies de contorno em termos de momentos fletores e esforos cortantes na viga conjugada.
A traduo dessas condies de contorno est mostrada na Figura 14 e segue o que est indicado na Tabela 3. As duas extremidades da viga conjugada esto livres (sem apoio). Essa
figura tambm mostra o carregamento na viga conjugada, que corresponde a qC(x) =
M(x)/EI(x), sendo que M(x) dado pelas equaes (37) e (38).
A determinao dos momentos de engastamento M A e M B feita de maneira anloga ao que
foi feito na seo anterior, isto , impe-se que o carregamento da viga conjugada seja autoequilibrado. Disso resulta duas equaes de equilbrio na viga conjugada. A primeira impe
que o somatrio das foras verticais na viga conjugada seja nulo e a segunda equao impe
que o somatrio dos momentos em relao ao ponto A na viga conjugada seja nulo:
l
0
+
dx M
A
EI ( x )
(x / l ) 1
(x / l) x dx M
2
EI ( x )
x /l
+
dx M
B
0 EI ( x )
x 2 / l
dx M B +
0 EI ( x )
20
lM
0
EI ( x )
lM
0
q (x)
dx = 0 ;
q (x) x
EI ( x )
dx = 0 .
(39)
(40)
Departamento de Engenharia Civil
/ I(x )
M
A
x
qc(x)= M(x)/I(x)
/ I (x )
M
B
l
Figura 14 Viga conjugada e seu carregamento para determinao dos momentos de
engastamento para uma carga linearmente distribuda.
Foi implementada uma funo em C (FixEnd_q) que est descrita na seo 8 para calcular os
momentos de engastamento perfeito de uma barra com variao cbica do momento de inrcia da seo transversal para uma solicitao de carga transversal linearmente distribuda.
Para testar esta implementao, feita uma comparao com tabelas de Guldan apresentadas
por Sssekind [2]. Essa tabelas contm valores para os momentos de engastamento perfeito
de vigas com seo transversal retangular e somente consideram o caso de uma carga transversal uniformemente distribuda (q = qA = qB). As Tabelas 6 e 7 mostram a comparao dos
valores calculados pela presente metodologia [vc] com os mostrados por Sssekind [2] para
vigas em msula reta com valores da relao IB/IA variando de 1,000 a 0,005. Os valores dos
momentos de engastamento perfeito ( M A e M B ) so mostrados de forma adimensional multiplicados por 12/ql2. Observa-se pelas equaes (13) e (14) que ql2/12 o valor dos momentos de engastamento perfeito para uma barra com momento de inrcia constante e solicitada
por uma carga uniformemente distribuda q.
Tabela 6 Momentos de engastamento perfeito para vigas em msula reta com seo transversal retangular para carga transversal uniformemente distribuda
(IB/IA variando de 1,000 a 0,150).
IB/IA
1,000
0,900
0,800
0,700
0,600
0,500
0,400
0,300
0,200
0,150
12 / ql 2 [vc]
M
A
1,000
1,021
1,045
1,073
1,105
1,144
1,192
1,256
1,349
1,416
12 / ql 2 [2]
M
A
1,000
1,018
1,043
1,071
1,110
1,146
1,193
1,255
1,348
1,416
12 / ql 2 [vc]
M
B
1,000
0,979
0,956
0,930
0,901
0,867
0,826
0,776
0,708
0,663
12 / ql 2 [2]
M
B
1,000
0,978
0,955
0,931
0,897
0,866
0,826
0,777
0,709
0,663
21
Departamento de Engenharia Civil
Tabela 7 Momentos de engastamento perfeito para vigas em msula reta com seo transversal retangular para carga transversal uniformemente distribuda
(IB/IA variando de 0,120 a 0,005).
IB/IA
0,120
0,100
0,080
0,060
0,050
0,040
0,030
0,020
0,010
0,005
12 / ql 2 [vc]
M
A
1,469
1,513
1,567
1,638
1,683
1,739
1,812
1,916
2,095
2,274
12 / ql 2 [2]
M
A
1,469
1,513
1,571
1,638
1,683
1,739
1,812
1,916
2,095
2,274
12 / ql 2 [vc]
M
B
0,629
0,602
0,570
0,531
0,507
0,479
0,445
0,400
0,331
0,272
12 / ql 2 [2]
M
B
0,629
0,602
0,566
0,531
0,507
0,479
0,445
0,400
0,331
0,272
As Tabelas 6 e 7 mostram que so mnimas as diferenas entre os resultados atuais e os apresentados por Sssekind, demonstrando que a presente implementao est correta. A vantagem da presente implementao que ela calcula numericamente os momentos de engastamento perfeito para qualquer valor da relao IB/IA, para qualquer forma de seo transversal
(no s a retangular) e para cargas transversais linearmente distribudas (no somente cargas
uniformes).
8 Implementao computacional
Com base no exposto nas sees 6 e 7 foram implementadas funes utilizando a linguagem
computacional C para fazer o clculo dos parmetros fundamentais de uma barra com variao cbica do momento de inrcia da seo transversal ao longo do seu vo (msula reta).
Dessa forma, foi implementada uma funo (RotStiffCoef) para calcular os coeficientes de
rigidez rotao K A e K B e os coeficientes de transmisso de momentos t AB e t BA , e outra
funo (FixEnd_q) para calcular as reaes momentos de engastamento perfeito provocados
por uma carga transversal linearmente distribuda.
A funo RotStiffCoef resolve dois sistemas de duas equaes com duas incgnitas: o sistema formado pelas equaes (27) e (28); e o sistema formado pelas equaes (33) e (34). A
funo FixEnd_q resolve o sistema formado pelas equaes (39) e (40).
Os coeficientes dessas equaes correspondem a integrais de divises de polinmios. Portanto, as funes RotStiffCoef e FixEnd fazem uso de uma funo auxiliar (IntegraDivPoli)
que faz o clculo da integral da diviso de dois polinmios quaisquer. Essas trs funes so
descritas a seguir.
22
Departamento de Engenharia Civil
void RotStiffCoef( double len, double I0, double I1, double I2, double I3,
double* Ka, double* Kb, double* tab, double* tba )
Esta funo calcula os coeficientes de rigidez rotao e os coeficientes de transmisso de
momentos para uma barra com variao cbica do momento de inrcia da seo transversal.
Parmetros:
len
I0
I1
I2
I3
Ka
Kb
tab
tba
comprimento da barra
valor do momento de inrcia da seo transversal no incio da barra
valor do momento de inrcia a 1/3 do vo da barra
valor do momento de inrcia a 2/3 do vo da barra
valor do momento de inrcia no final da barra
coeficiente de rigidez rotao no incio da barra
coeficiente de rigidez rotao no final da barra
coeficiente de transmisso de momentos do incio para o fim da barra
coeficiente de transmisso de momentos do fim para o incio da barra
(input)
(input)
(input)
(input)
(input)
(output)
(output)
(output)
(output)
void FixEnd_q( double len, double qa, double qb, double I0, double I1,
double I2, double I3, double* Ma, double* Mb )
Esta funo calcula as reaes momentos de engastamento perfeito para uma barra com variao cbica do momento de inrcia da seo transversal solicitada por uma carga transversal
linearmente distribuda ao longo do seu vo.
A conveno de sinais para carga transversal tal que valores positivos correspondem direo para cima (na direo do eixo local y transversal barra).
A conveno de sinais para as reaes momentos de engastamento tal que valores positivos
correspondem a momentos no sentido anti-horrio.
Parmetros:
len
qa
qb
I0
I1
I2
I3
Ma
Mb
comprimento da barra
valor da carga transversal no incio da barra
valor da carga transversal no final da barra
valor do momento de inrcia da seo transversal no incio da barra
valor do momento de inrcia a 1/3 do vo da barra
valor do momento de inrcia a 2/3 do vo da barra
valor do momento de inrcia no final da barra
reao de engastamento perfeito no incio da barra
reao de engastamento perfeito no incio da barra
23
(input)
(input
(input)
(input)
(input)
(input)
(input)
(output)
(output)
Departamento de Engenharia Civil
double IntegraDivPoli( int grauPoliNumerador, double* PoliNumerador,
int grauPoliDenominador, double* PoliDenominador,
double a, double b)
Esta funo realiza a integrao da diviso de dois polinmios no intervalo [a,b].
A funo verifica se necessrio subdividir o intervalo de integrao. No caso de a diferena
entre o valor da integral calculado em todo o trecho ser diferente, a menos de uma tolerncia,
da soma dos valores calculados nas duas metades do trecho, a funo calcula recursivamente a
integral em cada metade do trecho. A funo utiliza integrao numrica de Gauss com quatro pontos de integrao em cada trecho.
Parmetros:
grauPoliNumerador
PoliNumerador
grauPoliDenominador
PoliDenominador
a
b
grau do polinmio do numerador
coeficientes do polinmio do numerador
grau do polinmio do denominador
coeficientes do polinmio do denominador
limite inferior de integrao
limite superior de integrao
(input)
(input)
(input)
(input)
(input)
(input)
Retorna:
Resultado da integrao.
9 Concluses
Este trabalho mostrou que possvel determinar parmetros fundamentais para barras com
variao linear da altura da seo transversal (msula reta) de uma forma numrica, simples e
eficiente.
A metodologia adotada, baseada na analogia da viga conjugada, resultou em uma implementao computacional em C. Uma funo implementada calcula coeficientes de rigidez rotao e coeficientes de transmisso de momentos para barras isoladas. Outra funo calcula
reaes momentos de engastamento perfeito para barras submetidas a cargas transversais linearmente distribudas. Os parmetros calculados por essas funes so considerados fundamentais pois podem ser utilizados como base para o clculo de todos os outros parmetros
(solues fundamentais) que descrevem o comportamento de uma barra isolada no contexto
do Mtodo dos Deslocamentos.
As funes implementadas esto prontas para serem incorporadas a qualquer programa de anlise de estruturas que utilizem este mtodo. Isso j est sendo realizado no programa Ftool
[10].
Como continuao do trabalho, sugere-se a determinao de reaes momentos de engastamento perfeito para outras solicitaes, tais como variao de temperatura. Alm disso, seria
importante a considerao de msulas parablicas (altura da seo transversal variando em um
polinmio do segundo grau ao longo do comprimento da barra). Para tanto, necessrio considerar a variao do momento de inrcia da seo transversal utilizando um polinmio do
sexto grau.
24
Departamento de Engenharia Civil
10 Agradecimentos
Os autores agradecem o pesquisador Alexandre de Oliveira Lopes do Tecgraf/PUC-Rio pela
ajuda na implementao da funo que calcula a integral da diviso de polinmios. A aluna
teve uma bolsa de iniciao cientfica (PIBIC) do CNPq.
11 Referncias
1. - White, R.N., Gergely, P. e Sexsmith, R.G. Structural Engineering Combined Edition
Vol. 1: Introduction to Design Concepts and Analysis Vol. 2: Indeterminate Structures, John Wiley & Sons, New York, 1976.
2 - Sssekind, J.C. Curso de Anlise Estrutural Vol. 3: Mtodo das Deformaes e
Processo de Cross, Editora Globo, Porto Alegre, 1977.
3 - Martha, L.F. Mtodos Bsicos da Anlise de Estruturas, http://www.tecgraf.puc-rio.br/
~lfm, 2006.
4 - Sssekind, J.C. Curso de Anlise Estrutural Vol. 2: Deformaes em Estruturas e
Mtodo das Foras, Editora Globo, Porto Alegre, 1977.
5 - Tauchert, T.R. Energy Principles in Structural Mechanics, McGraw-Hill, New York,
1974.
6 - Fodosiev, V. Resistncia dos Materiais, Edies Lopes da Silva, Porto, Portugal, 1977.
7 - Beer F.P. e Johnston Jr, E.R. Resistncia dos Materiais, Terceira Edio, MAKRON
Books, So Paulo, 1996.
8 - Timoshenko, S.P. e Gere, J.E. Mecnica dos Slidos, Vols. 1, Livros Tcnicos e Cientficos, Rio de Janeiro, 1994.
9 - West, H.H. Analysis of Structures: An Integration of Classical and Modern Methods,
Segunda Edio, John Wiley & Sons, Nova Iorque, 1989.
10 - Martha, L.F. Ftool: Two-dimensional frame analysis tool, http://www.tecgraf.pucrio.br/ ftool, 2002.
25
You might also like
- T7 - Polimeros Comportamento MecanicoDocument26 pagesT7 - Polimeros Comportamento Mecanicobru8No ratings yet
- EMT 020 Lista 4Document2 pagesEMT 020 Lista 4Thaisa FonsecaNo ratings yet
- Elasticidade e PlasticidadeDocument21 pagesElasticidade e PlasticidadeEliana FrancoNo ratings yet
- Atividade 3 - Mecanica Dos Solos - Ensaio de Compreensão Nao ConfinadaDocument2 pagesAtividade 3 - Mecanica Dos Solos - Ensaio de Compreensão Nao ConfinadaJoao Pedro Carvalhais100% (2)
- Gabarito PHPDocument89 pagesGabarito PHPARIANANo ratings yet
- Exercicios 04 Tensoes e DeformacoesDocument3 pagesExercicios 04 Tensoes e DeformacoesGabryel LuizNo ratings yet
- Peças de Concreto Armado Sujeitas À Torção (ARMADURAS PRINCIPAIS)Document10 pagesPeças de Concreto Armado Sujeitas À Torção (ARMADURAS PRINCIPAIS)Axel Sallas LopesNo ratings yet
- Osb CatDocument5 pagesOsb CatAngelo Tiberio de CarvalhoNo ratings yet
- Flexao ExcentricaDocument13 pagesFlexao ExcentricaGabriel CarlosNo ratings yet
- Aulas 7 e 8-Exercício PDFDocument17 pagesAulas 7 e 8-Exercício PDFBrenda RNo ratings yet
- Relatório - Muro de GabiãoDocument5 pagesRelatório - Muro de GabiãoCamila FerreiraNo ratings yet
- 04b136 A60382d7bd584b16Document34 pages04b136 A60382d7bd584b16Suziane TavaresNo ratings yet
- MS - Estado de Tensão PDFDocument2 pagesMS - Estado de Tensão PDFFranciscoNo ratings yet
- Estruturas Mistas - Aula 04 - Viga Mista - Parte 1Document89 pagesEstruturas Mistas - Aula 04 - Viga Mista - Parte 1MANOEL OTÁVIO QUARESMA SALOMÃONo ratings yet
- Parte 4 - Cisalhamento Puro PDFDocument22 pagesParte 4 - Cisalhamento Puro PDFCarol SolNo ratings yet
- Plataforma RG 600 M Com AssinaturaDocument40 pagesPlataforma RG 600 M Com AssinaturaMarcusGepp86430No ratings yet
- Propriedade de OssosDocument41 pagesPropriedade de OssosRicardo DiasNo ratings yet
- 3b Propriedades MecanicasDocument42 pages3b Propriedades MecanicasJanaina Aquino QueirogaNo ratings yet
- Laje TreliçadaDocument5 pagesLaje TreliçadaEnthony MarkNo ratings yet
- Ficha 1 Vigas Eq Linha Elastica PDFDocument30 pagesFicha 1 Vigas Eq Linha Elastica PDFFoxdevil LopesNo ratings yet
- 8 - Pilar: Fernando Musso Junior Musso@npd - Ufes.br Estruturas de Concreto Armado 118Document7 pages8 - Pilar: Fernando Musso Junior Musso@npd - Ufes.br Estruturas de Concreto Armado 118Renato SeveroNo ratings yet
- Resistencia Dos MateriaisDocument19 pagesResistencia Dos MateriaisPedro JuniorNo ratings yet
- Memória de Cálculo Treliça Ponte Rolante Halyson1Document20 pagesMemória de Cálculo Treliça Ponte Rolante Halyson1Antonio Tadeu MenesesNo ratings yet
- Vu-Pr147-14-Mc-11-201-1-20190710124451 - InterseçãoDocument209 pagesVu-Pr147-14-Mc-11-201-1-20190710124451 - InterseçãoJordana FurmanNo ratings yet
- Rema 1Document18 pagesRema 1Matheus JoséNo ratings yet
- Calculo Olhal de Chapa - MelhoradoDocument2 pagesCalculo Olhal de Chapa - MelhoradoFredFrederico100% (1)
- Relatório Ensaio de FlexãoDocument9 pagesRelatório Ensaio de FlexãoDenisson BraunNo ratings yet
- Calculo de Olhal e ManilhasDocument12 pagesCalculo de Olhal e Manilhasfabiosouza2010100% (2)
- 8 AULA 08 Sapatas de DivisaDocument46 pages8 AULA 08 Sapatas de DivisaBruno De Carvalho LibórioNo ratings yet
- Calculo de Olhal e ManilhasDocument14 pagesCalculo de Olhal e ManilhasptkfernandesNo ratings yet