Professional Documents
Culture Documents
Algebra Linear Revisto PDF
Uploaded by
Bruno MoreiraOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Algebra Linear Revisto PDF
Uploaded by
Bruno MoreiraCopyright:
Available Formats
UNIVERSIDADE DE SO PAULO
ESCOLA DE ENGENHARIA DE SO CARLOS
PS-GRADUAO EM ENGENHARIA DE ESTRUTURAS
INTRODUO MECNICA DO CONTNUO
NOTAS DE AULAS (lgebra e Anlise Tensorial)
Sergio Persival Baroncini Proena
So Carlos, Janeiro de 2011.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
1. Espaos Vetoriais Reais
Def.1 - Espao vetorial sobre o campo R dos nmeros reais um sistema
(V,+, R, ) constitudo por:
- um conjunto no-vazio V cujos elementos so chamados vetores;
- uma operao binria + sobre V chamada adio de vetores, cujo elemento
neutro ser representado por 0;
- um campo = (R, +, ), dotado das operaes de soma e multiplicao,
cujos elementos so chamados escalares, sendo os elementos zero e
identidade, representados por 0 e 1, respectivamente;
- uma aplicao () de RV em V chamada multiplicao de escalar por
vetor, que associa ao par ( , x) o vetor representado por x.
Para a operao de adio, as seguintes propriedades devem ser satisfeitas:
a) A adio de vetores comutativa
x y yx
x, y V
(1)
b) A adio de vetores associativa
x ( y z ) ( x y ) z x, y, z V
(2)
c) Existe um nico vetor 0 em V, chamado vetor nulo ou elemento neutro, tal
que:
x 0 x x V
(3)
d) Para cada vetor x V , o chamado vetor oposto ou simtrico de x tal
que:
x ( x) 0 x V
(4)
Def.2 - sejam dois vetores x e y, define-se por vetor diferena ou subtrao
entre x e y ao vetor resultante da soma de x com o simtrico de y,
representado por x - y, ou seja:
x y x ( y )
(5)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
A operao de multiplicao por escalar deve apresentar as seguintes
propriedades:
e)
( x) ( ) x , e x V
f) 1x x x V
g) ( ) x x x
, e x V
h) ( x y ) x y e x, y V
(6 a,b,c,d)
Os exemplos que seguem constituem espaos vetoriais.
Exemplo 1: o conjunto dos nmeros reais para as definies usuais de soma
e produto.
Exemplo 2: o sistema (n , , R , ) das n-uplas de nmeros reais
x ( 1 , 2 ,..., n ) e y ( 1 , 2 ,..., n ) sendo i , i R , em que as operaes
igualdade de vetores, a adio de vetores e a multiplicao por escalar so
definidos por:
x y se 1 1 ; n n
x y ( 1 1 ,..., n n )
x ( 1 ,..., n )
Exemplo 3: o espao vetorial V cujos elementos so funes reais de mesmo
domnio D tais que
( f g ) x f ( x) g ( x)
( f ) x ( f ( x))
Exemplo 4: o sistema (mn , , R , ) de todas as m n matrizes sobre o
campo , sendo a adio de matrizes e a multiplicao de matriz por escalar
operaes j conhecidas.
2. Dependncia e independncia linear de um conjunto de vetores
Def.3 - sendo V o espao vetorial sobre o campo , um subconjunto S com
nmero finito de vetores x1 , x2 ,, xn de V dito ser linearmente dependente
se existirem escalares ( 1 , 2 ,..., n ) no todos nulos tais que:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
x1 x2 xn 0
1
(7)
A notao empregando ndices superiores , por hora, introduzida e ser
justificada mais adiante.
Def.4 - um subconjunto S dito linearmente independente se para
quaisquer vetores no-nulos x1 , , xn de S, em nmero finito, e escalares j ,
a igualdade:
1 x1 2 x2 n xn 0 implicar em 1 2 ... n 0
Exemplo 5: dois vetores (segmentos orientados clssicos) no-colineares no
plano so linearmente independentes.
Exemplo 6: os monmios 1, x1, x2, ... , xn so vetores linearmente
independentes no espao dos polinmios em x. Evidentemente, neste caso os
ndices superiores indicam potncias.
3. Espaos com produto interno
Def.5 - Denomina-se produto interno em V, toda aplicao que associa a
cada par de vetores (x,y) de VV um nico real denotado por (x . y) tal que:
i. x y y x
ii.
x y ( x y)
iii. x y z x z y z
iv. x x 0 sendo que x x 0
se e s se x 0
(8 a,b,c,d)
Um espao vetorial com produto interno denominado Espao Euclidiano.
Exemplo7 - No espao 2 o produto interno entre x = (x1,x2) e y = (y1,y2)
pode ser definido por:
x y x1 y1 x2 y2 x1 y2 x2 y1
(9)
Exemplo8 - No espao vetorial das funes contnuas no intervalo [a,b]
define-se produto interno por:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
f g a f t g t dt
b
(10)
Exemplo9 - No espao das matrizes reais de ordem nn define-se produto
interno por:
A B tr A B
T
(11)
onde a operao trao, denotada por tr(.), realiza a soma dos elementos da
diagonal principal de uma matriz.
Def.6 - Sendo V um espao euclidiano, denomina-se norma de um elemento
u de V ao nmero real no-negativo obtido por:
u u.u
(12)
A norma assim definida satisfaz s seguintes propriedades:
i.
u u
ii. u 0 p / u 0 ; 0 0
iii. u v u v
(desigualdade de Cauchy-Schwarz)
iv. u v u v
(desigualdade triangular)
(13 a,b,c,d)
Obs. Qualquer operao que no necessariamente faa uso do produto
interno, como na (12), mas que satisfaa s propriedades acima constitui
uma norma. Assim o conceito se estende aos espaos vetoriais quaisquer.
Def.7 - a distncia entre dois elementos x e y de um espao vetorial V
definida como a norma da diferena entre eles, sendo representada por:
d x, y x y
(14)
A medida assim definida satisfaz s seguintes propriedades:
i. d x, y d y, x
ii. d x, y 0 se x y e d x, x 0
(15 a,b,c)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
iii. d x y d x, z d z , y
(a distncia o menor caminho entre dois
pontos)
Um espao com operao distncia definida chamado de espao mtrico.
Def.8 - Da desigualdade de Cauchy-Schwarz decorre a definio de ngulo
0 entre dois vetores no-nulos, representada por:
cos x, y
x y
x y
(16)
Obs. No se define ngulo entre vetores quando pelo menos um deles o
vetor nulo.
Outras definies complementares so tambm de interesse:
Def.9 - Dois vetores x e y so ortogonais se x y 0 ; logo, o ngulo entre
eles
Def.10 - Um conjunto de vetores de V ortogonal se seus vetores forem
ortogonais dois a dois.
Def.11 - Um vetor x dito unitrio, ou versor, se x 1 .
Exemplo10 - No espao das funes contnuas no intervalo [-1,1] com
produto interno definido por:
f g 1 f t g t dt
1
(17)
os polinmios f (t ) t e g (t ) 3t 2 1 so ortogonais, assim como as
funes f (t ) cos 2m t e g (t ) sen2n t , com m e n inteiros quaisquer.
4. Combinaes lineares. Base e dimenso
Def.12 - um vetor x do espao vetorial V dito ser uma combinao linear
dos vetores x1 , , xn de V se existirem escalares 1 , 2 ,..., n tais que:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
x 1 x1 2 x2 n xn
(18)
Def.13 - uma base de um espao vetorial V um subconjunto de V
linearmente independente tal que todo vetor do espao pode ser escrito de
forma nica como uma combinao linear dos vetores da base.
Existem infinitas bases em um espao vetorial.
Def.14 - a dimenso de um espao vetorial o nmero mximo de vetores
linearmente independentes do espao.
O espao V dito de dimenso finita se admitir uma base finita.
O teorema seguinte apenas enunciado.
Teorema1 - Em qualquer espao euclidiano:
i. Um vetor x ortogonal a todo vetor do espao se, e s se, x o vetor
nulo.
ii. Um conjunto ortogonal de vetores no-nulos linearmente independente.
Def.15 - Num espao euclidiano, um conjunto ortonormal um conjunto
ortogonal de vetores unitrios.
Exemplo10 - Considerando-se o produto interno definido por x y xi yi (i =
1,...,n) , os vetores:
x1 1, 0, 0,, 0
x2 0, 1, 0,, 0
xn 0, 0,, 0, 1
so unitrios e constituem uma base ortonormal para o n .
Os teoremas que seguem so enunciados sem demonstrao:
Teorema2 - Todo espao vetorial possui uma base.
(19)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Teorema 3 - Num espao de dimenso finita qualquer conjunto de vetores
linearmente independente pode ser estendido a uma base.
Corolrio - Se V for um espao de dimenso finita n ento:
a) Qualquer conjunto de n + 1 vetores de V linearmente dependente;
b) Nenhum subconjunto de V contendo menos de n vetores pode gerar V.
Sendo ei com (i 1,, n), uma base de V, qualquer vetor x do espao dado
por x 1e1 2 e2 n en pode ser escrito segundo uma notao indicial
na forma:
x i ei
(20)
onde os i so as componentes de x na base ei , tambm denominadas, por
uma razo que ficar clara mais adiante, componentes contravariantes.
Nota-se que na notao indicial, a repetio de ndices no mesmo termo tem
o significado de somatria, sendo o nmero de parcelas igual dimenso do
espao. O ndice repetido denominado ndice mudo. Alis, para ndice
mudo pode-se adotar qualquer letra, de modo que segundo uma mesma base
o vetor x pode ser representado indiferentemente por:
x i ei j e j k ek
(21)
uma vez que todos os ndices variam de 1 a n .
No caso de vetores diferentes, escritos cada um como combinao linear de
uma mesma base, conveniente adotar letras diferentes para os ndices
mudos. Entretanto, a notao indicial permite representar, por exemplo, um
conjunto de m vetores escritos em funo de uma mesma base de dimenso
n, do seguinte modo:
xi ai j e j
com i = 1, ..., m e j = 1, ... , n
O que equivalente a:
(22)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
x1 a1 e1 a1 e2 a1 en
1
x2 a2 1 e1 a2 2 e2 a2 n en
(23)
xm am 1 e1 am 2 e2 am n en
Decorre da definio 15 e do teorema 2 que todo espao euclidiano de
dimenso finita admite uma base ortonormal. Os vetores da base ortonormal
verificam a condio:
ei e j ij
(24)
ei e j 0 se i j e ei e j 1 se i j . Essas condies so
resumidas na (24) pelo smbolo de Kronecker ij .
ou seja:
Em termos prticos, a base ortonormal pode ser obtida de uma base
ortogonal dividindo-se cada vetor pela sua norma.
Sejam ei e f j duas bases de Vn (espao vetorial de dimenso n). Ento como
os f j so vetores de Vn, tambm eles podem ser representados por
combinaes lineares dos ei :
f j C j i ei
(25 a)
A mesma expresso pode ser colocada em forma matricial admitindo-se, por
exemplo, que nas componentes C ij o ndice superior i est associado ao
nmero de uma linha da matriz C e o ndice inferior j ao nmero de uma
coluna. Nessas condies vale tambm a representao:
f C e
T
(25 b)
sendo C interpretada como matriz de mudana de base.
Sendo, por outro lado, i e j as componentes de um vetor x nas bases ei e
f j , respectivamente, ento:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
x ei f j
i
Substituindo-se a relao (25 a), segue que:
x j C ij ei i ei
(26)
Como as componentes segundo uma mesma base so nicas, ento:
i j C ij
(27 a)
ou ainda, matricialmente:
(27 b)
Sendo a matriz C inversvel e conhecidas as componentes i , vale escrever:
C
1
ou
D , com D C
Em notao indicial:
j i Di j
(28)
Nota-se, portanto, que a variao das componentes de um vetor escrito na
base ei para a base f j se d com o inverso da matriz que opera a mudana
dos vetores da base ei para os vetores da base f j . Segue da a denominao
de componentes contravariantes.
A condio de que D e C so inversas uma da outra pode ser colocada em
notao indicial como:
C ij Dik jk
(29)
onde se fez uso, novamente, do smbolo de Kronecker, mais formalmente
definido por:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
0 se k j
1 se k j
jk
(30)
Observa-se que nos vetores a notao com ndices superiores das
componentes contravariantes proposital e est para diferenciar das
componentes covariantes, que se escrevem em relao a uma base dual e so
identificadas por um ndice subscrito.
Um mesmo vetor pode ento ser escrito segundo componentes
contravariantes numa base natural ou covariantes numa base dual. Sendo ei
e g j versores das bases natural e dual, ambos se relacionam pela seguinte
condio:
ei g j i j
(31)
Conclui-se, portanto, que por definio os versores da base dual obedecem a
uma relao de ortogonalidade em relao aos versores da base natural
regida pela (31).
O interesse pela base dual existe quando a base natural no ortogonal,
entretanto, nestas notas, por simplificao, admite-se que as bases naturais
adotadas sejam sempre ortonormais, de modo que as componentes naturais e
duais se confundem. Nesse caso, o posicionamento dos ndices nas
representaes dos versores da base ou das componentes de vetores em
relao a elas torna-se irrelevante. Segue, por exemplo, que o smbolo de
Kronecker pode ser representado indistintamente com ndices em posio
mista, sobrescritos ou subescritos como: i j ji ji .
Por outro lado, em funo de sua propriedade o smbolo de Kronecker pode
funcionar, numa deduo, como um trocador de ndices, pois:
j i ij
(32)
O mesmo smbolo serve, ainda, para indicar a soma dos elementos da
diagonal principal de uma matriz ( n n ) como segue:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
a ij a
ij
(33)
ii
(nesse caso fica implcito que: a a a a ) .
ii
11
22
nn
5. Produto vetorial e produto misto
O produto vetorial de dois vetores u e v definido como a operao que
apresenta as seguintes propriedades:
i. u v v u
ii. u v w u w v w
u,v V ; ,
iii. u . u v v . u v 0
iv. u v . u v u.u v.v u.v
(34 a,b,c,d)
O resultado do produto vetorial um vetor ortogonal ao plano definido por u
e v, como indica a propriedade iii.
Em relao a uma base ortonormal de V, a operao produto vetorial
definida por:
u v
ijk
ui v j ek
(35)
onde ijk o operador de permutao, que assume o valor +1 para uma
permutao cclica ('horria') dos ndices i, j e k, -1 para uma permutao
anti-cclica e zero no caso de coincidncia nos valores de quaisquer pares ou
tripla de ndices.
Escrevendo-se u e v em funo de suas componentes na base ortonormal de
V u ui ei ; v v j e j e substituindo-se na relao anterior, conclui-se que:
e e
i
ijk
ek
(36)
Realizando-se o produto interno da anterior por ek e por em en resultam,
respectivamente:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
ijk ei e j .ek
(37)
e e . e
(38)
en ijk mnp ek .e p
Da anterior seguem os seguintes casos particulares:
- se k = p
ijk mnk ei e j . em en im jn in jm
(39)
- se k = p e j = n
ijk mjk ei e j . em e j 2 im
(40)
- se k = p, j = n e i = m
ijk ijk 6
(41)
As duas ltimas relaes podem ser verificadas considerando o seguinte
desenvolvimento:
ijk mjk i 21 m 21 i 31 m31 i12 m12 i 32 m32 i13 m13 i 23 m 23
Tendo-se em vista a (34 d) e a (16), resulta a definio do mdulo do
produto vetorial:
u v
u v . u v u.u v.v u.v
u
u v
v u
v cos 2 u,v
(42)
v sen u,v
A relao do mdulo do produto vetorial ao quadrado escrita em
componentes fica dada por:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
u v
ijk mnk ui v j um vn
im jn in jm ui v j um vn
(43)
ui ui v j v j ui vi u j v j
Seguindo um procedimento anlogo possvel demonstrar que:
u v w u.w v u.v w
(44)
Geometricamente o mdulo do produto vetorial coincide com a rea do
paralelogramo definido por u e v. Assim, admite-se a denominao "vetor
rea" para o vetor resultante do produto vetorial de dois vetores com mdulo
igual rea do paralelogramo por eles definido e com direo normal ao seu
plano.
O produto misto de vetores, simbolizado por: u v .w definido pela
operao:
u1
u v .w ijk ui v j wk u2
v1
v2
w1
w2
u3
v3
w3
(45)
O produto misto apresenta as seguintes propriedades:
u v .w w u .v v w .u
v u .w u w .v w v .u u,v,w V
ii. u v w .d u w .d v w .d u,v,w,d V ; ,
iii. w. u v 0 se os vetores so linearmente dependentes.
i.
O resultado do produto misto, em mdulo, pode ser geometricamente
interpretado como o volume do paraleleppedo de arestas alinhadas com u, v
e w.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
6. Formas lineares, bilineares e quadrticas
Chama-se forma linear em um espao vetorial V toda aplicao f que a cada
vetor x de V associa um nico nmero real f(x), de modo que:
f ( x y ) f ( x) f ( y )
f ( x) f ( x)
(46)
Uma forma bilinear uma aplicao B que a cada par de vetores de V
associa um nico nmero real satisfazendo as seguintes condies:
B ( x y , z ) B ( x, z ) B ( y , z )
B( x, y ) B ( x, y )
B ( x, y z ) B ( x , y ) B ( x, z )
B ( x, y ) B ( x, y )
x, y , z V R
(47)
Uma forma bilinear dita simtrica se:
B ( x, y ) B ( y , x )
(48)
Seja B uma forma bilinear simtrica definida em um espao vetorial V de
dimenso finita. Define-se forma quadrtica associada forma bilinear como
a aplicao que a cada vetor x de V associa um nico nmero real B( x) , de
modo que:
B( x) B( x, x)
(49)
Uma forma quadrtica se diz positivo-definida se:
B( x) B( x, x) 0
(50)
7. Transformaes Lineares em Espaos Euclidianos
Sendo U e V espaos vetoriais reais, uma funo F : U V dita uma
transformao linear se vale a seguinte relao:
F ( u v) F (u ) F (v)
(51)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
onde , so nmeros reais, u e v so vetores de U e F (u ), F (v) so vetores
de V.
Exemplo 12 - Seja f uma funo de em tal que: f : x 3x , ento:
a) f ( x) f ( x)
b) f ( x y ) f ( x) f ( y )
De fato:
f ( x) 3 x 3x f ( x)
f ( x y ) 3( x y ) 3 x 3 y f ( x) f ( y )
A funo f como definida acima uma transformao linear de em .
Exemplo13 - Analogamente pode-se mostrar que a funo f de em tal
que f : x 3x 5 no uma transformao linear de em .
Exemplo14 - Seja V o espao vetorial das funes polinomiais f sobre o
corpo dos nmeros reais, dadas por:
f : x a0 x 0 a1 x1 an x n
Seja D o operador de derivao tal que:
D( f ) : x a1 2a2 x nan x n 1 .
Ento D uma transformao linear de V em V, ou seja, em um ponto x
qualquer do domnio de f:
a) D [ f ( x] Df ( x)
b) D[ f1 ( x) f 2 ( x)] Df1 ( x) Df 2 ( x)
Voltando considerao da (51), se V = R a transformao F denominada
forma linear, ou funcional linear. O teorema da representao das formas
lineares diz que dada uma forma F existe um nico vetor a U tal que:
F (v ) a . v v U .
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Por outro lado, sendo x e y vetores de um espao vetorial de dimenso finita,
a uma forma bilinear B definida em V pode-se associar uma transformao
linear T, tal que:
B( x, y ) T x. y
x, y V
(52)
8. Vetores e valores prprios
Seja T uma transformao linear num espao vetorial de dimenso finita.
Um vetor x do espao que satisfaz a relao:
T xx
(53)
chamado vetor prprio da transformao. O escalar , que pode assumir
valores reais ou complexos, chamado valor prprio, ou autovalor de T.
Existem alguns teoremas importantes no estudo dos autovalores. Os seus
enunciados so aqui apresentados sem demonstrao.
Teorema 4: Seja V um espao vetorial real euclidiano. Se T uma
transformao linear simtrica definida em V, ento todos os seus
autovalores so reais.
Teorema 5: Seja T uma transformao linear num espao vetorial de
dimenso finita. O conjunto de auto-vetores de T correspondente a
autovalores distintos linearmente independente.
Teorema 6: Seja T uma transformao linear simtrica num espao vetorial
de dimenso finita. Existe em V uma base ortonormal relativa qual a matriz
de T diagonal.
Teorema 7: Seja T uma transformao linear simtrica num espao vetorial
de dimenso finita. Auto-vetores de T associados a autovalores distintos so
ortogonais entre si.
Teorema 8: Seja V um espao vetorial real euclidiano de dimenso trs. Seja
uma forma quadrtica definida sobre versores f1 , f 2 e f3 de V e a
transformao linear a ela associada. Ento a forma quadrtica passa por um
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
mnimo 3 e por um mximo 1 , respectivamente nos versores f 3 e f1 , onde
1 2 3 so os autovalores reais da transformao.
9. Tensores de segunda ordem
Quando os espaos U e V forem um mesmo espao vetorial, a transformao
linear F : V V chamada de tensor.
Um tensor A de segunda ordem associa a um vetor arbitrrio a outro vetor
Aa. A transformao em questo tal que:
A a b Aa Ab
(54)
O tensor nulo de segunda ordem O associa o vetor nulo ao vetor arbitrrio a:
Oa 0
(55)
O tensor identidade I associa o vetor a ele mesmo:
Ia a
(56)
9.1 Produto Tensorial
O produto tensorial de dois vetores u e v de V o tensor definido pela
relao:
(u v) w (v w) u
(57)
onde w um vetor de V.
Note-se que o produto tensorial uma transformao linear de V em V, ou
seja:
(u v)( x y ) (u v) x (u v) y
(58)
9.2 Base e componentes de um tensor
Seja V um espao vetorial euclidiano de dimenso finita n, sendo ei versores
de uma base. O conjunto de tensores:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
ei e j c / i, j 1,, n
(59)
constitui uma base para o espao dos tensores de segunda ordem.
A representao de um tensor T em componentes com relao base
tensorial pode ser escrita por:
T Tij ei e j c / i, j 1,, n
(60)
Por outro lado, dado o tensor T, suas componentes em relao base
tensorial podem ser determinadas por:
Tij ei .Te j c / i, j 1,, n
(61)
9.3 Algumas Propriedades
O transposto de um tensor S representado por S T o tensor que obedece a
seguinte propriedade:
S u v u STv
u, v V .
(62)
Um tensor dito simtrico se S T S e dito antissimtrico se S T S . Da
relao (62) sendo S um tensor antissimtrico segue que:
S u v u S v
u, v V
(63 a)
No caso particular de u = v na relao anterior, resulta:
S u u 0
Decorrem da (57) e da definio (62):
a)
b)
c)
d)
(u v) w.d w.(v u ) d
(u v)T v u
(u v)(c d ) (v.c)(u d )
L (u v) ( Lu v)
(63 b)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
e) (u v) L u L v
T
u , v, c, d , w V
(64 a,b,c,d,e)
Outras relaes de interesse envolvendo transposto de um tensor so as
seguintes:
a) ( S T )T S T T T
b) S S T
T
c) ST T T S T
T
d) S T S
T
(66 a,b,c,d)
Todo tensor pode ser decomposto, de forma nica, como a soma de sua parte
simtrica e outra antissimtrica, as quais so definidas, respectivamente, por:
U 12 ( F F T )
W 12 ( F F T )
(67 a,b)
onde F U W . Como conseqncia: v Fv v Uv .
O trao de um tensor a aplicao que a cada tensor associa um nmero real
definido por:
tr (u v) u v
(68)
O produto interno entre dois tensores S e T o nmero real representado por
(S.T) e obtido pela seguinte operao:
S .T tr S T T
(69)
A norma de um tensor o nmero real no-negativo determinado por:
S S .S
12
(70)
A norma obedece s seguintes propriedades:
a) S v S
b) SF S
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
c) S G S G
d) u v u v
(71 a,b,c,d)
O determinante de um tensor S o determinante da matriz que rene suas
componentes em relao uma base qualquer:
det S det[ S ]
(72)
Em termos das componentes do tensor S, a relao anterior pode ser escrita
na forma:
1
det S ijk pqr Sip S jq Skr
6
(73)
Levando-se em conta que ijk ijk 6 , pode-se ainda escrever:
ijk det S pqr Sip S jq Skr
(74)
Com as relaes anteriores pode-se concluir que:
det S det S T
det S 3 det S
det ( AB) det A det B
(75 a,b,c,d)
det I 1
Se det A 0 o tensor inversvel e, portanto, existe A1 tal que:
det A1 det A
(76)
Com a relao anterior, pode-se mostrar que:
AB
B 1 A1
(77)
Uma interpretao geomtrica para o determinante de um tensor de segunda
ordem pode ser obtida mediante o produto misto, o qual, como j foi visto,
representa o volume de um paraleleppedo.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Um tensor T que atua sobre os vetores que concorrem no produto misto
transforma linearmente o paraleleppedo envolvido em outro cujo volume
determinado por:
v T u T v .T w pqr Tpi ui Tqj v j Trk wk ijk ui v j wk det T
(78)
Assim sendo:
T u T v .T w
v
det T
V
u v. w
(79)
Em aplicaes de interesse, particularmente quando T representa um tensor
de deformao, comum impor a restrio que det T > 0, isto : a
deformao no implica em inverso do volume inicial. Nessas condies,
os sinais de mdulo na relao anterior podem ser suprimidos.
Em outro caso particular, quando w u v segue que:
T u T v .T u v T T u T v . u v
det T
u v. u v
u v. u v
T
(80)
ou ainda,
det T u v . u v T T T u T v . u v
(81)
de onde resulta:
T u T v det T T u v
T
(82)
9.4 Invariantes de um tensor de segunda ordem
As propriedades do produto misto permitem mostrar que dado um tensor de
segunda ordem T arbitrrio e duas bases tambm arbitrrias definidas pelos
vetores (u,v,w) e (l,m,n) valem as seguintes relaes:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
T u v .w u Tv .w u v .Tw T l m .n l Tm .n l m .Tn
u v. w
l m .n
T u Tv .w u Tv .Tw T u v .Tw T l T m .n l Tm .Tn Tl m .Tm
u v. w
l m .n
Tu Tv .Tw Tl Tm .Tn
u v. w
l m .n
(83 a,b,c)
Das relaes anteriores, nota-se que o resultado numrico de cada igualdade
o mesmo independente da base adotada e, por isso denominado invariante.
Respectivamente para as relaes (83 a,b,c) os invariantes so representados
por I1 , I 2 e I 3 .
Formalmente, invariantes so aplicaes que fazem corresponder a um
tensor de segunda ordem um nico nmero real, independente da base
escolhida para represent-lo. Dado um tensor qualquer A, os invariantes
podem ser definidos pelas seguintes operaes:
I1 tr A Aii
1
1
2
2
I 2 tr A tr ( A A) Aii Aij Aji
2
2
I 3 det A
(84 a,b,c)
Da (84 a) segue que:
tr AT tr A
tr A B tr B A
(85)
Da (84 c) pode-se concluir que:
det AT det A
(86)
Admitindo-se que um tensor A seja definido pelo produto tensorial de dois
vetores arbitrrios u e v, isto : A u v , as relaes (83) e as definies
dos invariantes permitem concluir que o segundo e o terceiro invariantes de
A se anulam e:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
tr u v u.v
(87 a,b)
det u v 0
A partir de uma representao matricial para o tensor A cuja base definida
a partir de uma base de versores ei , pode-se mostrar que o primeiro
invariante (trao) coincide com a soma dos elementos da diagonal principal.
O segundo invariante coincide com a soma dos determinantes menores de
ordem dois e o terceiro invariante dado pelo determinante da matriz do
tensor.
Do anterior decorre uma propriedade til em algumas aplicaes de
interesse, que consiste na derivada do determinante de um tensor em relao
a um escalar.
Nesse sentido, seja T um tensor inversvel que depende de um parmetro real
. Segue da (79) sucessivamente que:
u v . w det T T u T v .T w
(88 a)
d
d
d
u v . w
det T T u T v .T w T u T v .T w
d
d
d
(88 b)
d
T u T v . T w
d
d 1
d
Introduzindo o tensor B
T T , ou BT
T , a anterior assume a
d
d
forma:
d
u v . w
det T BT u T v .T w T u BT v .T w
d
T u T v .BT w
(89)
Considerando que Tu, Tv e Tw so vetores e com a (83 a) e a definio do
primeiro invariante, resulta:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
d
u v . w
det T tr B T u T v .T w tr B det T u v .w
d
(90)
Conclui-se, finalmente, que:
d
dT
det T det T tr T 1
d
d
(91)
9.5 Vetores e valores prprios de um tensor de segunda ordem
Seja A um tensor de segunda ordem arbitrrio. Um vetor x um vetor
prprio de A se existe um escalar que satisfaz a relao:
A x x ou A I x 0
(92)
O escalar pode assumir valores reais e chamado valor prprio, ou
autovalor de A.
Por outro lado, diz-se que um autovalor de A se satisfaz a equao
caracterstica:
det A I 0
(93)
Em forma expandida, a equao caracterstica pode ser representada na
forma:
3 I1 2 I 2 I 3 0
(94)
onde I 1 ,I 2 e I 3 so invariantes do tensor A.
Um tensor simtrico S possui trs autovalores reais 1 ,2 e 3 e trs vetores
prprios e1 ,e2 e e3 , ou autoversores, que compem uma base ortonormal.
Aplicando a (59) os autoversores constituem uma base segundo a qual o
tensor S pode ser escrito tendo os autovalores como componentes:
S 1 e1 e1 2 e2 e2 3 e3 e3
(95)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
A forma anterior denominada representao espectral do tensor simtrico.
Explorando essa representao, os invariantes dados pelas (62) assumem as
seguintes expresses:
I1 tr S 1 2 3
1
2
I 2 Sii Sij S ji 12 13 23
2
I 3 ijk Si1 S j 2 S k 3 123
(96 a,b,c)
Um tensor dito positivo-definido se:
a Sa 0 a 0
(97)
Um tensor simtrico positivo-definido possui autovalores positivos. Nessa
condio, pela (69 c) det S > 0 e, portanto, S inversvel. A representao
espectral do tensor inverso dada por:
S 1 11 e1 e1 21 e2 e2 31 e3 e3
(98)
Um tensor antissimtrico possui pelo menos um autovalor no-nulo.
9.6 Relao entre um tensor antissimtrico e o produto vetorial
possvel associar a um vetor a do produto vetorial um tensor
antissimtrico A tal que:
Av a v com a V e A LinV
(99 a)
Adotando-se uma base ortonormal ek , em forma indicial a relao anterior
passa a ser dada por:
Aik vk ijk a j vk
Segue ainda que:
(99 b)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Aik ijk a j
ikm Aik ikm ijk a j ikm ikj a j 2 jm a j 2 am
(100)
As relaes anteriores permitem determinar as componentes do tensor A e do
vetor a umas em funo das outras. Tais relaes escritas em notao
matricial so dadas, respectivamente, por:
0
A a3
a2
a3
0
a1
2 A32 A23
a2
a1 ; a A13 A31
0
1
2 A21 A12
(101)
Em particular, se o vetor a se apia no eixo x3 ( a a3 ) resulta:
0 a 0
A a 0 0
0 0 0
(102)
Nota-se uma correspondncia vlida em trs dimenses: o nmero de
componentes independentes de a e de A coincidem. Em geral, diz-se que a
o vetor associado ao tensor A e A o tensor do vetor a.
Um exemplo da utilizao do conceito de "vetor de tensor" apresenta-se na
relao seguinte:
T v Ts v Ta v Ts v av
v V e T LinV
(103)
onde T s a parte simtrica de T, T a a parte antissimtrica e a o vetor de
Ta.
9.7 Tensor Ortogonal
Sejam x e y dois vetores quaisquer de V transformados por um tensor Q de
tal modo que:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
x Qx;
y Qy;
x x ;
y y
(104)
Observa-se que o tensor Q assim definido preserva o produto interno de
vetores, ou seja:
x y x y
(105)
De outro modo, pela (16), o ngulo entre x e y se mantm entre x e y .
Ainda da (100):
x y x y Q x Q y QT Q x y .
(106)
Logo, pode-se concluir que QT Q I , ou que QT Q 1 . O tensor Q
chamado de Tensor Ortogonal.
Considere-se a ao de um tensor ortogonal sobre um dos versores de uma
base ortonormal:
e*j Q e j
(107)
Assim, explorando as (56) e (57) pode-se concluir que o tensor ortogonal
pode ser escrito numa base mista da seguinte forma:
Q ei* ei ;
QT ei ei*
(108 a,b)
Por outro lado, conhecidos os versores ei* e ei , as componentes do tensor
ortogonal na base ei e j podem ser calculadas mediante as seguintes
relaes:
ij
ei .Q e j ei . e*j cos ei , e*j
ij
ei .QT e j Qei . e j Q ji e j . ei* cos e*j , ei
(109 a,b)
Ainda, se det Q 1 o tensor ortogonal dito prprio e efetua, conforme se
mostra em seguida, rotao em torno de pontos ou de eixos que passam por
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
esses pontos (eixo de rotao). Se det Q 1 o tensor ortogonal dito
imprprio e efetua tanto rotao quanto reflexo de eixos em relao a
planos perpendiculares a estes eixos.
Para mostrar que o efeito do tensor ortogonal prprio sobre um vetor pode
ser interpretado como uma rotao do vetor em torno de um eixo,
inicialmente considera-se a seguinte identidade:
QT Q I Q I
(110)
Operando-se o determinante em ambos os lados da igualdade, encontra-se:
det Q I 0
(111)
Comparando-se a relao anterior com a (66), conclui-se que o tensor Q
possui um autovalor unitrio e, portanto:
p QT p Q p
(112)
Admitindo-se que p seja um versor, pode-se acrescentar a ele dois outros
versores, q e r, e compor uma base ortonormal. Explorando
convenientemente a propriedade (112) e com a condio de ortogonalidade
entre os versores dessa base, conclui-se que Qq e Qr so ortogonais ao vetor
p e esto contidos no mesmo plano do par (q, r). Nessas condies, valem as
relaes:
Qq q r;
Qr q r
(113)
Pela ortogonalidade inicial entre q e r e com a propriedade (106) do tensor
Q, conclui-se ainda sobre a ortogonalidade entre Qq e Qr, e que ambos so
versores, isto :
Qq Qr 0;
Qq Qr 1
(114)
Sendo det Q 1 , da (79) pode-se escrever a igualdade:
p q r Qp Qq Qr
(115)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Seguem, das (109) e (110), substituindo-se nelas as definies dadas pelas
(108), as seguintes relaes entre os parmetros , , e :
2 2 1
2 2 1
0
1
(116 a,b,c,d)
As relaes anteriores garantem a existncia de um ngulo
definido no plano q-r tal que: cos e sen .
Por outro lado, com os pares de versores da base (p,q,r) pode-se gerar uma
base tensorial e em relao ela escrever o tensor Q nos moldes descritos
pela (60), isto :
Q Qpp p p Qpq p q Qpr p r
Qqp q p Qqq q q Qqr q r
(117)
Qrp r p Qrq r q Qrr r r
As componentes de Q podem ser determinadas conforme indica a relao
(61) e escritas em funo de , , e . Nessas condies, considerando-se
que cos , sen e aplicando-se as (113), a (117) assume
uma forma mais simplificada:
Q p p cos q q r r sen q r r q (118)
Em notao matricial o tensor de rotao descrito pela (118) fica
representado por:
0
1
Q 0 cos
0 sen
sen
cos
0
(119)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
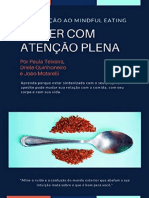
Aplicando Q sobre os versores q e r, conclui-se, conforme ilustra a Figura 1,
que o efeito o de uma rotao de um ngulo em torno da direo definida
por p:
0
0
1
q 1 Q q 0 cos
0
0 sen
0 0
sen 1 cos
cos 0 sen
(120)
0
0
1
r 0 Q r 0 cos
1
0 sen
0 0
sen 0 sen
cos 1 cos
(121)
p = p*
(det Q =1)
r*
q
q
*
p* (det Q = -1)
Figura 1 Interpretao do tensor de rotao sobre uma base
Para fins de interpretao geomtrica do efeito da aplicao do tensor Q
sobre um vetor x qualquer, considere-se um ponto O para origem em relao
qual posicionada a base (p,q,r) e tambm para origem de vetores
representados geometricamente no espao tridimensional correspondente. A
aplicao de Q sobre x leva ao seguinte vetor:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
y Qx x p p xq cos xr sen q xq sen xr cos r
(122)
onde: x p x p ; xq x q ; xr x r .
Analisando a (122), e em particular as componentes do vetor y em relao
base (p,q,r), nota-se, em primeiro lugar, que a componente segundo p a
mesma do vetor x segundo aquele mesmo versor. As outras componentes
encontram-se no plano q-r.
r
A'
yr
xr
A
Qx
x
q
a
yq
xq
o'
q
Qx
o
q
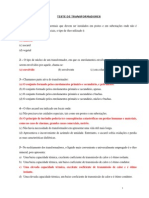
Figura 2 Interpretao geral do tensor de rotao
A Figura 2 ilustra uma interpretao geomtrica para o efeito do tensor de
rotao sobre um vetor x. Na representao espacial claramente pode-se
concluir que a componente de x e de Qx a mesma em relao ao eixo p. Na
projeo no plano q-r, destacam-se as componentes de Qx, que segundo a
geometria indicada podem ser facilmente determinadas pelas relaes:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
yq Qx cos
x cos cos sen sen
(123 a)
xq cos xr sen
yr Qx sen
x sen cos sen cos
(123 b)
xr cos xq sen
Nota-se que as relaes anteriores aparecem na (122), validando a
interpretao geomtrica proposta.
Pode-se, finalmente, com o auxlio da Figura 2, determinar as seguintes
relaes para o clculo das componentes e m do deslocamento do ponto A
(posicionado pelo vetor x) respectivamente nas direes de q e r:
xq yq xq cos 1 xr sen
m yr xr xr cos 1 xq sen
(124)
Em notao matricial a relao anterior fica expressa como segue:
cos 1
m sen
sen xq
cos 1 xr
(125)
Incluindo a componente segundo p, o deslocamento do ponto A fica
expresso por:
cos 1
m sen
p
0
sen
cos 1
0
0 xq
0 xr
1 x p
(126)
Existe uma relao entre um tensor ortogonal Q e um tensor antissimtrico
A dada por:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Q eA I A
1 2
1
A An
2!
n!
(127)
Observa-se que sendo A antissimtrico:
QT e A e A Q 1
T
(128)
A (127) pode ser entendida como uma funo de argumento tensorial e valor
tensorial. Alm disso, ela apresenta a propriedade de isotropia.
Diz-se que uma funo tensorial H F (T ) apresenta isotropia se:
QHQT QF (T )QT F QTQT
(129)
sendo Q um tensor ortogonal. No caso da relao (127 ), tem-se que H e A
e:
1
1
QHQT Q e AQT Q I A A2 An QT
2!
n!
1
1
T
T
2
T
n
T
QIQ
QAQ 2! QA Q n! QA Q
I
eQAQ
(130)
Funes tensoriais isotrpicas podem ser construdas a partir de funes
analticas. Assim, a (127) resulta de:
ex 1 x
1 2
1
x xn
n!
2!
(131)
Por outro lado, substituindo-se na matriz do tensor ortogonal (119) os
seguintes desenvolvimentos em srie:
sen
cos 1
3
3!
2!
5
5!
4!
7
7!
6!
(132 a,b)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
e aps separar a soma de matrizes e compar-la com a (127) , conclui-se
que:
0 0
A 0 0
0
(133)
Em notao tensorial:
A q r r q
(134)
9.9 Relao entre as componentes de um tensor de segunda ordem numa
mudana de base
H vrias situaes em que grandezas vetoriais e tensoriais em geral
precisam ser referenciadas a bases que diferem entre si por uma rotao.
Nesses casos h interesse em relacionar as componentes daquelas grandezas
escritas segundo as diferentes bases.
Sejam, ento, ei e e j as bases em questo, cujos versores se relacionam por
uma rotao mediante as relaes:
e j Qk j ek
(135)
ou
e Qe
(136)
Certo vetor u pode ser escrito nessas bases pelas relaes:
u ui ei u j e j u
(137)
Levando-se em conta a relao entre os versores das bases:
u u j Qk j ek Qij u j ei
(138)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Segue da anterior a relao entre as componentes do vetor u:
u j Qij ui
u QT u
(139)
ou
u Qu
(140)
No caso de um tensor de segunda ordem T, o mesmo pode ser escrito
segundo duas bases tensoriais como:
T tij ei e j tkl ek el
(141)
Considerando a relao de rotao entre os versores das bases segue que:
T tkl Qmk em Qnl en tkl Qmk Qnl em en tmn em en
(142)
Entre as componentes do tensor vale, portanto, a relao:
tmn Qmk tkl Qnl
(143)
ou, matricialmente
T QT QT
(144)
ou
T QT T Q
(145)
Assim, um tensor de segunda ordem numa mudana de base deve obedecer a
regra anterior.
Uma concluso importante resulta do clculo dos autovalores do tensor T :
det T I det QT T Q I 0
Explorando uma propriedade do determinante segue que:
(146)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
det Q T Q I det Q T Q Q I Q
T
det QT T I Q det QT det T I det Q 0
(147)
Finalmente, conclui-se que:
det T I det T I 0
(148)
Ou seja: tambm autovalor para T.
10. Diferenciao em Espaos Vetoriais
Seja g uma funo com domnio num intervalo aberto I R e cujos valores
podem ser escalares, vetores ou tensores 1. Sendo um escalar que define
uma vizinhana em torno de um ponto t do domnio, a derivada de g em t,
( g ), definida por:
g (t )
d g t
dt
lim
0
g t g
(149)
A definio de derivada e o conceito de parcela de ordem superior implicam
em que se pode escrever o valor da funo em torno de t como:
g t g t g (t ) ( )
(150)
isto , um termo linear em mais um termo de ordem superior, ou que
tende a zero mais rapidamente do que o termo linear quando 0 .
Pode-se ainda interpretar que a derivada uma aplicao (linear) que, para
pequeno, permite aproximar a variao g t g por um termo
linear no acrscimo. Esse conceito pode ser generalizado, como se ver em
seguida, para as aplicaes em que o domnio est definido num espao
vetorial.
Por outro lado, observando a consistncia dimensional em cada parcela da
(150), conclui-se que a derivada de uma funo de valor vetorial um vetor
e de uma funo de valor tensorial um tensor.
1
g(x) denota o valor de g em x.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Em Mecnica do Contnuo, porque aos pontos materiais sero associados
vetores de posio, as aplicaes que fazem corresponder aos pontos valores
escalares, vetoriais ou tensoriais de interesse tero como argumentos vetores
e sero referenciadas no como funes, mas sim como campos escalares,
vetoriais ou tensoriais, respectivamente.
Sejam, ento, V e U espaos vetoriais normados e f uma aplicao definida
numa regio em V e com valores em U. Generalizando o conceito de parcela
de ordem superior, diz-se que a medida de f(v) aproxima-se de zero mais
rapidamente que a medida de v, ou de ordem superior nessa medida
( f (v) ( v ) p / v 0 ) se:
lim
v 0
v 0
f (v )
0.
v
(151)
Considerando-se, ento, uma aplicao f sobre V que leva a valores em U e
seja W um subconjunto aberto em V. Ento, f : W U diferencivel em
x W na direo do vetor u se existir uma transformao linear
Df ( x) : V U tal que:
f x u f x Df x u (u ) p / u 0
(152)
Em particular D f ( x) u a parcela linear no acrscimo e define o conceito
de derivada direcional.
No sentido de estender o papel da derivada expresso na (149) para este caso,
considere-se uma vizinhana de x na direo de u definida com o auxlio de
um escalar , na forma: x u . Ento, para x e u fixos, tem-se que:
f ( x u ) f * ( )
(153)
Pode-se, agora, desenvolver a (153) em srie em torno de :
f * f * 0
d *
f
( )
d 0
(154)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Substituindo-se esse resultado na (153) e truncando o desenvolvimento em
srie no termo linear em , aquela relao passa a ser escrita como:
f x u f x
d
f ( x u)
d
0
(155)
Para o confronto com a anterior interessante reescrever a (152) na seguinte
forma:
f x u f x Df x u
(156)
Segue da comparao entre a (156) e a (155) que:
Df x u
d f x u
d
(157)
0
Diz-se que a relao anterior define a derivada direcional de f e exprime a
parte linear do acrscimo de f conforme indica a (152).
Em cada caso, pode-se determinar a parte linear do acrscimo ou por
aplicao da definio dada pela (152) ou por aplicao direta da (157).
Como exemplo para o clculo da parcela linear no acrscimo, seja : V R
dada por: (v) v.v . Ento, pelo conceito de diferenciabilidade:
v u v D v u ( u ) p / u 0
Para determinar a parcela linear no acrscimo, considere-se
desenvolvimento de (v u ) pela definio da aplicao dada:
(v u ) (v u ).(v u ) v.v 2 v.u u.u
(v u ) (v) 2 v.u u.u
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Pode-se mostrar que u.u de ordem superior quando u 0 , ou seja,
verifica a condio: lim
u 0
u 0
u.u
0.
u
De fato, pela desigualdade do tringulo: u.u u u
u.u
u , logo o
u
limite indicado na condio igual zero. Assim sendo,
D (v)u 2v.u
Por outro lado, ao mesmo resultado anterior pode-se chegar aplicando-se a
definio (157). Segue, ento, que:
(v u ) v.v 2 v. u 2u.u
d
(v u ) 2 v.u 2 u.u
d
d
(v u ) 2 v.u
d
0
Uma observao importante que no caso analisado D (v) u uma forma
linear, pois uma funo de valor escalar ( :V R ). Pode-se, portanto,
aplicar o teorema da representao das formas lineares e representar o
diferencial na forma do produto interno do vetor u por outro vetor:
D (v)u .u ( 2v.u )
(158)
Onde (.) o operador gradiente que associa a cada um vetor ;
claramente neste caso: 2v .
A derivada direcional satisfaz as propriedades usuais de derivadas, quais
sejam as regras do produto e da cadeia, a serem vistas mais adiante.
11. Gradiente e divergente
Considerem-se aplicaes gerais definidas num subconjunto aberto de V (um
espao vetorial associado ao espao de pontos) e que podem ser campos
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
escalares, vetoriais ou tensoriais. O conceito de derivada direcional, ou
diferenciabilidade, estendido a essa situao geral enseja a introduo dos
operadores gradiente e divergente.
Num primeiro caso, considere-se f como um campo escalar. Ento:
x u x D x u ( u ) p / u 0
e D ( x) uma aplicao linear de V em R . De fato, como j visto, pelo
teorema da representao das formas lineares D ( x) u pode ser escrito como
o produto interno vetor u pelo vetor gradiente, ( x)V :
D ( x ) u . u
(159)
Noutro caso, se f v um campo vetorial, escreve-se:
v x u v x Dv x u ( u )
e D v( x) uma transformao linear de V em V, ou seja, um tensor. Neste
caso, representa-se essa transformao por v( x) , lendo-se gradiente de v
em x, de modo que:
D v( x) u
v( x) u
(160)
tensor
Se f T um campo tensorial, escreve-se:
T x u T x DT x u ( u )
e DT ( x) uma transformao linear de V no espao dos tensores de
segunda ordem, ou seja, um tensor de terceira ordem. Neste caso, representase essa transformao por T ( x) , lendo-se gradiente de T em x, de modo
que:
DT ( x) u T ( x) u
tensor 2a ordem
tensor 3a ordem
(161)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Por definio, dado um campo vetorial regular V associado ao espao
pontual euclidiano, o campo escalar:
div v tr (v)
(162)
chamado divergente de v.
Por outro lado, o divergente de um tensor de segunda ordem pode ser obtido
pela contrao primeira do gradiente desse tensor, sendo essa operao
representada por:
divT T I
(163)
Nota-se que na relao anterior T um tensor de terceira ordem.
Com a relao (163) pode-se ainda escrever:
divT h T I h
(164)
Outras relaes de interesse envolvendo T e divT so as seguintes:
divT v h T I v h T v h
(165)
divT v T v
(166)
De fato, a ltima igualdade pode ser demonstrada a partir do seguinte
desenvolvimento em componentes:
T I h T ijk ns ei e j ek en es hp e p
T ijk hp ns jn ks ei e p
T ijk hp kj ei e p
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
T h T ijk hp ei e j ek e p
Autor: Sergio P.B. Proena
T ijk hp kp ei e j
T ijk hp kp ei jp e p
(167)
T ijk hp kj ei e p
Pelas definies anteriores, observa-se que o gradiente eleva a ordem do
argumento e o divergente diminui. Assim, por exemplo, sucessivamente o
gradiente de um escalar leva a um tensor de primeira ordem e o gradiente
desse tensor leva a um tensor de segunda ordem. Ao contrrio, o divergente
de um tensor de segunda ordem leva a um tensor de primeira e uma nova
aplicao do divergente leva a um escalar (tensor de ordem zero).
12. Regras do produto e da cadeia
Freqentemente necessrio computar a derivada da operao 'produto' de
duas funes cujos argumentos e valores pertencem a espaos vetoriais
normados. O 'produto' pode ser representado mediante operaes bilineares
diferentes, de acordo com os tipos de espaos envolvidos, como por
exemplo:
prod ( , v) v
prod (u , v) u.v
prod (u , v) u v
prod ( S , v) Sv
(165)
prod ( , S ) S
Em termos gerais a operao produto pode ser simbolizada por:
prod : F G W
(166)
onde F, G e W so espaos normados de dimenso finita e prod bilinear.
Assim, sendo f : D F e g : D G , ento h prod ( f , g ) : D W uma
operao bilinear definida por:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
h( x) prod f ( x), g ( x) x D
(167)
com D um subconjunto aberto de um espao vetorial de dimenso finita U.
Regra do produto: sejam f e g diferenciveis em x D . Ento o produto
h prod ( f , g ) diferencivel em x e
h( x u ) h( x ) D h( x ) u
u D
prod f ( x u ), g ( x u )
prod f ( x) Df ( x)u , g ( x) Dg ( x)u
prod f ( x), g ( x) prod f ( x), Dg ( x)u prod Df ( x)u , g ( x)
\
D h( x) u prod f ( x ), Dg ( x )u prod Df ( x )u , g ( x ) u D
(168)
Exemplificando numa situao mais especfica, com o produto simples de
funes, a (168) resulta partindo das condies de diferenciabilidade de f e
g:
f x u f x Df x u (u )
g x u g x Dg x u (u )
E, portanto, da bilinearidade da operao produto:
h x u f x u g x u
f x g x f ( x) Dg ( x)u Df x u g ( x) ( u )
sendo que os termos de ordem superior existem uma vez que:
Df ( x)u k1 u e Dg ( x) u k2 u .
Para o caso em que U = R, da regra do produto decorrem:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
( v) v v
(v.w) v.w v.w
(169)
(u v) u v u v
( Sv) S v S v
( S ) S S
onde o ponto indica derivada simples em relao a um escalar.
Regra da cadeia: seja g diferencivel em x D e f diferencivel em
y g ( x) . Ento a composio h f g diferencivel em x e
D h( x) D f ( y ) dg ( x)
ou,
D h( x) u D f g ( x) Dg ( x) u u D
(170)
De fato,
h( x u ) h( x ) D h( x ) u
u D
f g ( x u )
f g ( x) Dg ( x)u
f g ( x) Df g ( x) Dg ( x)u
Supondo, em particular, U R ento, escrevendo t em lugar de x:
d
f g (t ) Df g (t ) g (t )
dt
(171)
Voltando regra do produto, ela permite deduzir uma srie de relaes de
interesse entre gradientes e divergentes de campos escalares, vetoriais e
tensoriais e o gradiente do produto desses campos.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Seja v V campo vetorial, uma relao para ( v) , com um campo
escalar, pode ser deduzida a partir da aplicao da regra do produto. De fato,
por um lado:
x h v x h x v x D v h ( h )
Por outro lado,
x h v x h x D h v x D v h ( h )
x v x x D v h D hv x D hD v h ( h )
( h )
Comparando-se as duas formas, em particular os termos lineares no
acrscimo h, resulta:
D( v)h ( D v)h D hv
vetor
vetor
escalar
( v) h v h .h v
v h v h
v v h
v v v
(172)
Aplicando-se a definio (162) do divergente de um campo vetorial, resulta:
div v tr v v
tr v v.
div v div(v) v.
(173)
Seja, agora, um campo escalar definido pelo produto interno de dois campos
vetoriais u e v. Uma relao de interesse envolve u.v , sendo obtida,
analogamente como procedido anteriormente, do seguinte desenvolvimento:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
u x h .v x h) u x .v x D u.v h ( h )
u x h .v x h) u x D u h . v x D v h ( h )
D(u.v)h u.( D v h) Du h .v
escalar
vetor
vetor
(u.v). h u. v h v. u h
vT u. h u T v. h
u.v vT u u T v
(174)
Considerando-se um campo vetorial obtido pela aplicao de um campo
tensorial S sobre um campo vetorial v, as relaes para S v e div S v
podem ser obtidas do seguinte desenvolvimento:
S x h v x h Sv D Sv h ( h )
S x h v x h S x D S h v x D v h ( h )
D( Sv)h S ( D vh ) DS h v
vetor
vetor
tensor
(Sv) h S v h Sh v
Empregando-se a (165), resultam:
( Sv) h S v h S I v h
( Sv) h S v h divS v h
(175)
( Sv) S v divS v
Explorando, mais uma vez, a relao entre o trao do gradiente de um campo
vetorial e o divergente, da relao anterior obtm-se:
tr[( Sv)] tr div S v tr ( S v)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
div( S v) div S . v tr S v div S . v S T .v
(176)
Da relao anterior tambm se pode concluir que para qualquer vetor a dado,
o divergente de um campo tensorial S o nico campo vetorial com a
propriedade:
divS . a div( S a)
a V
(177)
Nota-se que o resultado da operao anterior um escalar. Assim, como S a
um campo vetorial, a operao div( Sa ) uma forma linear em V2, a qual
pode ser representada pelo produto interno de a pelo vetor divS de V.
Considerando agora o produto entre um campo escalar e outro tensorial,
tambm se pode mostrar que:
S x h S D S h ( h )
x h S x h x D h S x DS x h ( h )
D( S )h ( D S )h D h S
tensor
tensor
(178)
escalar
S h S h h S
O desenvolvimento em componentes permite concluir pela validade da
seguinte relao:
S u h u h S
(179)
Com a (179), a (178) passa a ser escrita na forma:
S h S h S h
(180)
S S S
2
Dado a V a operao div(S a) associa um escalar.
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Explorando a definio (163) e observando que:
S I S
(181)
da (179) resulta:
S I SI S I
(182)
div( S ) divS S
Observa-se que a (181) pode ser demonstrada a partir de sua forma em
componentes:
S I S e e e e e
S e e e e e
S e
S e
S S e e e
S e
S e
ij
ij
pm
ij
pm
ij
ij
ij
jk
ij
pm
jp
km
(183)
Uma ltima relao de interesse resulta do produto tensorial entre dois
campos vetoriais:
u x h v x h u v D u v h ( h )
u x h v x h u ( x) Du ( x)h v( x) Dv( x)h
u ( x) v( x) u Dv( x) h Du ( x)h v ( h )
D(u v)h u Dv( x)h Du ( x)h v
(u v)h u v h u h v
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Novamente, um desenvolvimento por componentes permite demonstrar as
igualdades:
u v h u v h
u h v u v h
Resulta que:
(u v) u v u v
(184)
Explorando a (163), pode-se obter:
(u v) I u v I u v I
div(u v) I v u u v
(185)
div(u v) div v u u v
Na deduo anterior empregou-se a igualdade, que pode ser demonstrada
mediante seu desenvolvimento em componentes:
u v I u v
(186)
13. Clculo das componentes do gradiente e do divergente de campos
escalares, vetoriais e tensoriais
Seja uma base fixa (ou invarivel) em V e um campo regular de natureza
escalar, vetorial ou tensorial. Ento, definindo-se o acrscimo por um vetor h
alinhado com o versor ek da base, pode-se escrever que:
x
e x D x ek ( ) p / 0
k
Portanto,
(187)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
D x ek lim
0
x ek x
(188)
O escalar pode ser interpretado como a componente do vetor acrscimo
segundo a direo definida pelo versor ek , ou seja: hk h.ek . Alm disso,
se a base est atrelada a um sistema cartesiano adotado, segundo os versores
da base definem-se as coordenadas cartesianas xk . Nessas condies o limite
indicado na (181) exprime uma derivada parcial (direcional) de em
relao a xk :
D x ek
x
xk
(189)
O conceito geral expresso pela (189) pode ser usado para o clculo das
componentes do gradiente e do divergente de campos escalares, vetoriais ou
tensoriais.
Num primeiro caso, considere-se que seja um campo escalar regular.
Ento, D x ek fica representado por um produto interno entre o gradiente
do campo escalar ( ) e o versor da base. Assim sendo, a derivada
direcional fornece as componentes desse gradiente:
D x ek . ek ( ) k
x
k
escalar
(190)
Conhecidas suas componentes num espao de dimenso n, o vetor pode
ser representado pela seguinte combinao linear dos versores da base:
ek
e1
e2
en
xk
x1
x2
xn
(191)
Sendo, agora, v um campo vetorial regular. Segue a seguinte relao
entre a derivada direcional e o gradiente do campo vetorial:
v
D x ek v ek
x
k
vetor
(192)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Como v um tensor, empregando a relao (61) suas componentes obtmse do seguinte desenvolvimento:
(v)ik ei .v ek ei .
v (v j e j )
. ei
xk
xk
vj
v
(e j . ei ) i
xk
xk
(193)
ji
Uma vez conhecidas suas componentes o tensor v pode ser representado
pela seguinte combinao linear dos tensores da base:
v (v)ik ei ek
i, k 1,, n
(194)
Com a (168) pode-se exprimir a relao para o clculo do divergente do
campo vetorial:
div v tr v tr (v)ik ei ek
(v)ik ei . ek
vi
v
ik i
xk
i x
i
(195)
Noutra situao, considere-se S como um campo tensorial regular.
Explorando a relao (163), podem-se obter expresses para S e divS .
Partindo de
D S x ek S x ek
S
xk
(196)
por um lado tem-se que:
S x ek Sijl ei e j el ek
Sijl ei e j lk Sijk ei e j
Por outro lado, introduzindo a representao de S em componentes, segue
que a (196) assume a representao:
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Sijk ei e j
Sij
xk
e e
i
Portanto, conclui-se que as componentes
ordem S podem ser determinadas por:
Sijk
do
tensor
de
Si j
terceira
(197)
xk
Empregando-se agora a definio do divergente de um tensor de segunda
ordem dada pela (163), pode-se deduzir uma expresso para divS :
divS S x I
Sij
xk
Sij
xk
e e
i
mn jm kn ei
ek mn em en
Sik
ei
xk
Como divS divS i ei , da anterior resulta que cada componente de divS
determinada por:
divS
Sik
xk
(198)
Uma aplicao da relao anterior aparece no estudo das tenses,
particularmente na relao de equilbrio do elemento de volume. Sendo b
o vetor que rene as componentes das foras por unidade de volume e T o
tensor que rene as componentes de tenso normal e de cisalhamento do
estado de tenso, aquela relao pode ser representada como:
divT b 0
(199)
De fato, a mesma expresso escrita em componentes fica dada por:
divT i b i ei 0
(k 1, 2,3)
(200)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Ou ainda, tendo-se em vista a (198):
Tik
b
e 0
i i
xk
(i, k 1, 2,3)
(201)
Considerando-se a independncia linear dos versores da base, segue que a
relao anterior representa o seguinte conjunto de equaes:
T11 T12 T13
b 1 0
x1
x2
x3
T21 T22 T23
b 2 0
x1
x2
x3
T31 T32 T33
b 3 0
x1
x2
x3
(202)
Normalmente, costuma-se associar os nmeros 1, 2 e 3 com as direes dos
eixos de referncia x, y e z. Alm disso, as componentes do tensor T que
possuem ndices iguais so as componentes de tenso normal e aquelas de
ndices diferentes as componentes de cisalhamento. Nessa notao a (202)
(cuja interpretao pode ser obtida a partir da figura abaixo) passa a ser
dada, j se levando em conta a simetria do tensor de tenso, por:
11 21 31
b 1 0
x1
x2
x3
12 22 32
b 2 0
x1
x2
x3
13 23 33
b 3 0
x1
x2
x3
(203)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
6. Teorema da divergncia
O teorema da divergncia aplica-se na transformao de integrais de campos
definidos sobre volumes (V) para integrais sobre as superfcies de contorno
( S ) desses volumes. A origem do teorema est na integrao por partes,
como se procura ilustrar em seguida.
Considere-se uma funo diferencivel de duas variveis, e resultante do
produto de duas funes diferenciveis. Ento, pela regra do produto:
f
g
f ( x, y ), g ( x, y ) g f
x
x
x
(204)
Portanto:
x
x
g
f
f
dx
g
dx
x x
x x
x x f ( x, y ), g ( x, y ) dx
x2
x
f
g dx f g x
x x
x2
(205)
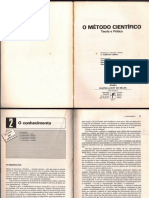
Seja, agora, um domnio no plano x-y. A normal ao contorno tem por
cossenos diretores: n1 nx l e n2 ny m .
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
ymx
a
dy
dy
dx
a
a
dx
S2
x1(y)
x2(y)
S1
ymin
X
Figura 3 Interpretao para integrao por partes
Segue que:
y
x ( y) g
g
f
d
f
dx
x ( y ) x
dy
y
x
mx
min
ymx
x ( y) f
x ( y)
g
dx
f
g
dy
x
x ( y)
x ( y)
ymin
y
y
f
g d fg x ( y ) dy fg x ( y ) dy
y
y
x
mx
mx
min
min
y
y
f
g d fg x ( y ) l dS 2 fg x ( y ) l dS1
x
y
y
mx
mx
min
min
Nota-se que o sinal negativo no integrando da ltima parcela da relao
anterior decorre do fato que em S1, indicado na Figura 3, a componente nx
da normal aponta no sentido contrrio ao do eixo x de referncia. Do
desenvolvimento anterior, conclui-se que:
g
f
g d f g l dS
x
S
f d
f g
d f g l dS
x
ou
(206)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
Analogamente ao ltimo resultado:
f g
y d S f g m dS
(207)
Em conjunto, as relaes (206) e (207) so representaes do teorema da
divergncia. De acordo com a interpretao dada ao produto (f g) o teorema
assume diferentes representaes.
Sendo, em particular, f g um campo escalar, as relaes do teorema da
divergncia podem ser reunidas na seguinte forma:
n dS x
i
d ,i d c / i 1,2
(208)
Passando para uma notao intrnseca, cada uma das relaes anteriores
pode ser interpretada como integrais de componentes de campos vetoriais
e n :
d n dS
(209)
Por outro lado, somando-se as relaes (206) e (207):
f g f g
x y d S f g l f g m dS
(210)
e interpretando-se (f g) como componentes de um campo vetorial v, isto ,
v fg e1 fg e2 , o teorema da divergncia se expressa por integrais
envolvendo campos escalares ( div v ) e ( v. n ):
div v d v. n dS
(211)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
A relao anterior pode ser generalizada considerando-se dois vetores
arbitrrios a e b 3 e substituindo-se v por: v v.a Tb . Por um lado, segue
que:
v.a Tb .n Tb v a .n a. v Tb n
a. v T T n b
(212)
Por outro lado, levando-se em conta as (173), (174) e (176):
div v.a Tb v.a div Tb Tb. v.a
v.a divT .b Tb. T v a
divT .b v.a vTb . a
(213)
v divT b.a vT b. a
Voltando integral (211) e tendo-se em vista a arbitrariedade dos vetores a e
b, resulta;
v divT vT d v T n dS
T
(214)
H outros dois casos particulares de interesse da relao anterior.
Em primeiro lugar, sendo T = I (tensor identidade), obtm-se:
v d v n dS
(215)
Num segundo caso, considerando-se v um vetor fixo, da (214) resulta:
v divT d v T T n dS
de onde se conclui que:
a e b so vetores arbitrrios e no campos vetoriais, por isso seus gradientes so nulos!
(216)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
divT d T n dS
T
(217)
Ainda se pode escrever outra forma de interesse, explorando-se o produto
vetorial entre os versores de uma base e o conceito de rotacional. Ento:
e j ek ljk el
ou
e e .e
j
ijk
(218)
O rotacional associado a um campo vetorial a o campo vetorial definido
por:
rot a ijk ak , j ei
a a
a a
a a
3 2 e1 1 3 e2 2 1 e3
x1 x2
x2 x3
x3 x1
(219)
Considerando-se a relao (208) e particularizando para o caso em que
ijk ak , segue que: ijk ni ak n a j e , j ijk ak , j , coincidindo,
respectivamente, com as i-zimas componentes do vetor
rotacional de a. Assim sendo, em modo intrnseco resulta:
rot a d n a dS
n a e
do
(220)
Todas as relaes entre as integrais de volume e de superfcie apresentadas
constituem formas do teorema da divergncia. Portanto, a depender dos
campos envolvidos o teorema da divergncia apresenta-se segundo
diferentes formas. Em resumo, as formas de maior interesse so dadas
segundo uma notao intrnseca por:
d n dS
(221)
com um campo escalar.
v d v n dS
(222)
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
div v d v. n dS
(223)
rot v d n v dS
(224)
sendo v um campo vetorial.
divT d T
(225)
n dS
onde T um campo tensorial.
Uma aplicao para o teorema da divergncia aparece na ponderao da
equao de equilbrio (192) para fins de gerao de uma forma fraca.
Para ilustrar tal aplicao, seja v um campo vetorial homogneo nas
condies de contorno essenciais de um slido, com significado de
deslocamentos virtuais e com grau de continuidade suficiente para que as
integrais definidas que seguem apresentem valores finitos. A integrao da
equao de equilbrio (192) ponderada por esse campo escreve-se:
divT v d b v d 0
(226)
Substituindo-se a relao (174) sobre a primeira integral e observando-se a
simetria do tensor de tenso T, obtm-se:
divTv d T v d b v d 0
(227)
O teorema da divergncia aplicado na primeira integral fornece:
Tv n dS T v d b v d 0
S
(228)
O contorno S dividido em partes complementares St e Su aonde se
prescrevem foras e deslocamentos, respectivamente. Considerando-se,
ainda, a definio do transposto de um tensor na integral de contorno, a
relao ( t T n ) que define o equilbrio na parte esttica do contorno ( St ) e
Introduo Mecnica do Contnuo - Elementos de lgebra Tensorial
Autor: Sergio P.B. Proena
lembrando que o campo v homogneo (nulo) na parte cinemtica do
contorno ( Su ), resulta:
T v d t v dS b v d
St
(229)
Dada a simetria do tensor T, ento o produto interno indicado no primeiro
integrando fica dado por: T v T s v . Ao tensor s v pode-se dar a
interpretao de campo tensorial de deformao virtual e, nessas condies a
(229) pode ser interpretada como a expresso do P.T.V.
You might also like
- Manual Personal Trainning Holmes Place AcademyDocument350 pagesManual Personal Trainning Holmes Place Academymarco_cadete_189% (9)
- RECURSO Na Barra FixaDocument2 pagesRECURSO Na Barra FixaAlmeida Moreno AlmeidaNo ratings yet
- Físico-Química de SuperfíciesDocument73 pagesFísico-Química de SuperfíciesJony Andrade100% (1)
- 6 - Corrente Russa - Manual Do Aparelho - BiosetDocument72 pages6 - Corrente Russa - Manual Do Aparelho - BiosetMary Hirahata50% (4)
- Manual de Instalacao e Manutencao de Transform Adores Secos - WEGDocument14 pagesManual de Instalacao e Manutencao de Transform Adores Secos - WEGrdpimentaNo ratings yet
- Caminhos - Dossiê Humanidades: Revista Online (Ano 10, Nº34 - Abr/jun 2019)Document82 pagesCaminhos - Dossiê Humanidades: Revista Online (Ano 10, Nº34 - Abr/jun 2019)Rodrigo Jaci SilvaNo ratings yet
- Dimensionamento Viga Rolamento 2Document12 pagesDimensionamento Viga Rolamento 2Thomaz SilvaNo ratings yet
- EXP9 - CIRCUITO RC-SÉRIE - Análise de Circuitos ElétricosDocument24 pagesEXP9 - CIRCUITO RC-SÉRIE - Análise de Circuitos ElétricosPedro Henrique ToledoNo ratings yet
- Aula 5 ELO FUSIVEL Prot Sist Distr PDFDocument58 pagesAula 5 ELO FUSIVEL Prot Sist Distr PDFLucas De MeloNo ratings yet
- Prescrição de Exercicio Fisico para GestantesDocument17 pagesPrescrição de Exercicio Fisico para Gestantesmaiaracristina17No ratings yet
- ARRIBAS, Célia. Pode Bourdieu Contribuir para o Estudo Da ReligiãoDocument31 pagesARRIBAS, Célia. Pode Bourdieu Contribuir para o Estudo Da ReligiãoRaphael SantosNo ratings yet
- Exercícios FetransDocument2 pagesExercícios FetranstrixbsNo ratings yet
- Apostila ToxicologiaDocument456 pagesApostila ToxicologiaRogério Torres Torres100% (2)
- Avaliação Educacional - SaulDocument8 pagesAvaliação Educacional - SaulGislaine Lourenço Rocha FigueredoNo ratings yet
- 9º Ficha de Preparação #2 9anoDocument3 pages9º Ficha de Preparação #2 9anoProfessora Celia PereiraNo ratings yet
- Material Didático - Eletricidade Aplicada A Eng. CivilDocument220 pagesMaterial Didático - Eletricidade Aplicada A Eng. CivilKim CruzNo ratings yet
- Tokui Waza PesquisaDocument8 pagesTokui Waza PesquisaAlan DemarcosNo ratings yet
- Comer Com Atencao Plena - Teixeira, PaulaDocument34 pagesComer Com Atencao Plena - Teixeira, Paulaani cristina bariquelloNo ratings yet
- Ficha Biofísica IDocument2 pagesFicha Biofísica IFrancisca Ribeiro100% (1)
- Teste - Trafo - GabaritoDocument15 pagesTeste - Trafo - GabaritomvpteixeiraNo ratings yet
- Catálogo Sensores de FluxoDocument16 pagesCatálogo Sensores de FluxoIcos Sensores para LíquidosNo ratings yet
- RefrigeraçãoDocument15 pagesRefrigeraçãoFrancisco SilvaNo ratings yet
- Volume 05Document10 pagesVolume 05orivalmedeiros100% (1)
- Motores StirlingDocument7 pagesMotores StirlingHenMenNo ratings yet
- Relatorio 03Document5 pagesRelatorio 03BarbaraNo ratings yet
- O Metodo Científico - GalianoDocument9 pagesO Metodo Científico - GalianoAna Paula Risson100% (1)
- Eletricidade - Power PointDocument11 pagesEletricidade - Power PointDaniel JulianNo ratings yet
- Lista 1Document2 pagesLista 1Luan Soares0% (1)
- QA Velocidade Do SomDocument1 pageQA Velocidade Do SomMónica SantosNo ratings yet
- TCC - Israel Franklin Dourado CarrahDocument187 pagesTCC - Israel Franklin Dourado CarrahIsrael DouradoNo ratings yet