You might also like
- Caso Practico TasacionDocument27 pagesCaso Practico Tasacionroxanaph100% (2)
- TASACIONDocument25 pagesTASACIONPhilip AylanNo ratings yet
- Guía de Capacidades de Microsoft Dynamics NAV PDFDocument28 pagesGuía de Capacidades de Microsoft Dynamics NAV PDFLulú CuellarNo ratings yet
- 13 Manual Servicio SigmaDocument90 pages13 Manual Servicio SigmaANGELA JULIETH LEGUIZAMON FUENTESNo ratings yet
- Introduccion Fotogrametria DigitalDocument194 pagesIntroduccion Fotogrametria DigitalJaume Segura GarciaNo ratings yet
- Estadisticas de EPPDocument7 pagesEstadisticas de EPPArmand Andres Mendoza VargasNo ratings yet
- 02 Red Geodesica IgnDocument70 pages02 Red Geodesica IgnckarlossNo ratings yet
- 02 Red Geodesica IgnDocument70 pages02 Red Geodesica IgnckarlossNo ratings yet
- U1 TipografíaDocument41 pagesU1 TipografíaAna Camila Saldaña GuerreroNo ratings yet
- S01 000Document122 pagesS01 000Steven ZLNo ratings yet
- Cámaras Aéreo Digitales Con Sensor Lineal y SensorDocument16 pagesCámaras Aéreo Digitales Con Sensor Lineal y SensorSteven ZLNo ratings yet
- Movimiento CentralDocument28 pagesMovimiento CentralSteven ZLNo ratings yet
- Orbitas ElipticasDocument26 pagesOrbitas ElipticasSteven ZLNo ratings yet
- GpsDocument1 pageGpsSteven ZLNo ratings yet
- Obras ComplementariasDocument3 pagesObras ComplementariasSteven ZLNo ratings yet
- Mapa BaseDocument1 pageMapa BaseSteven ZLNo ratings yet
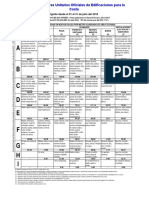
- Cuadro de Valores Unitarios-Julio 2016 CostaDocument1 pageCuadro de Valores Unitarios-Julio 2016 CostaZendel Freddy100% (1)
- 4 Codigo Unico Catastral - CUC Ing Miguel SheronDocument18 pages4 Codigo Unico Catastral - CUC Ing Miguel SheronRyNeh DcmNo ratings yet
- Historia de La Cartografia en El PeruDocument2 pagesHistoria de La Cartografia en El PeruSteven ZLNo ratings yet
- 110 - 1 Capi 1Document30 pages110 - 1 Capi 1Steven ZLNo ratings yet
- Guía Didáctica de Teledetección y Medio AmbienteDocument67 pagesGuía Didáctica de Teledetección y Medio AmbienteEducateledeteccionNo ratings yet
- Plan Gestion TacnaDocument120 pagesPlan Gestion TacnaSteven ZLNo ratings yet
- Guion RadialDocument3 pagesGuion RadialSteven ZLNo ratings yet
- 2045 Delimit Ac I On TacnaDocument20 pages2045 Delimit Ac I On TacnaSteven ZLNo ratings yet
- La Descentralización en El EcuadorDocument199 pagesLa Descentralización en El EcuadorSteven ZLNo ratings yet
- Capitulo 7 (Paralaje)Document13 pagesCapitulo 7 (Paralaje)omar45No ratings yet
- Astronomia de Posicion CadizDocument256 pagesAstronomia de Posicion Cadizrahi77653100% (3)
- Ley 27783 Ley de Bases de La Descentralización 2002Document24 pagesLey 27783 Ley de Bases de La Descentralización 2002Steven ZLNo ratings yet
- FormulasDocument0 pagesFormulasCarlos AvalosNo ratings yet
- Normatividad ReformaDocument5 pagesNormatividad ReformaalbertochinoNo ratings yet
- Ejercicios de CapitalizacionDocument2 pagesEjercicios de CapitalizacionSteven ZLNo ratings yet
- Astronomia de Posicion CadizDocument256 pagesAstronomia de Posicion Cadizrahi77653100% (3)
- Ejercicio TCP IPDocument6 pagesEjercicio TCP IPAna De la cerdaNo ratings yet
- Actividad 4 MCDocument7 pagesActividad 4 MCZombiNo ratings yet
- Catalogo CerámicaDocument121 pagesCatalogo Cerámicaandressitto1905No ratings yet
- Permiso de WordDocument4 pagesPermiso de WordMarcelino Cruz VicenteNo ratings yet
- Ficha de Datos Solis 3KDocument2 pagesFicha de Datos Solis 3KadfaNo ratings yet
- 2.1 Conceptos ProcesosDocument4 pages2.1 Conceptos ProcesosSantiago EmmanuelNo ratings yet
- Diseodeunsistemadealarmaconlgicaprogramable 130217192448 Phpapp01Document23 pagesDiseodeunsistemadealarmaconlgicaprogramable 130217192448 Phpapp01Milton AlvesNo ratings yet
- Anexo CómputoDocument7 pagesAnexo CómputoJose M Mendoza RNo ratings yet
- Ecuaciones Lineales y No LinealesDocument25 pagesEcuaciones Lineales y No LinealesCarlos Harrison Casanova CarranzaNo ratings yet
- Procedimiento de Instalación Cliente VPN NCPDocument10 pagesProcedimiento de Instalación Cliente VPN NCPJulio AltamiranoNo ratings yet
- Cuestionario Sobre Método de Las 6DsDocument4 pagesCuestionario Sobre Método de Las 6DsDerek javier Campos rodriguezNo ratings yet
- Catálogo de Colores : Azul Turquesa Cobalto Azul Marino IndigoDocument4 pagesCatálogo de Colores : Azul Turquesa Cobalto Azul Marino IndigoAndrésNo ratings yet
- Vision Estereoscopica, Bautista Serrano Maria GuadalupeDocument26 pagesVision Estereoscopica, Bautista Serrano Maria GuadalupeMaria GuadalupeNo ratings yet
- Lab09 LógicaCombinacionalDocument12 pagesLab09 LógicaCombinacionalFabrizio Amaya100% (1)
- De Programas de Informática: V2 - 2021 Términos de Referencia Consultoría Por Contratación DirectaDocument24 pagesDe Programas de Informática: V2 - 2021 Términos de Referencia Consultoría Por Contratación DirectaChristian PuchaicelaNo ratings yet
- Boletin Alimentos y BebidasDocument97 pagesBoletin Alimentos y BebidasRafael Flores PerazaNo ratings yet
- UAVs Services Files From Albatross Aeronautics (English and Spanish) AlbaeroCarlosDocument12 pagesUAVs Services Files From Albatross Aeronautics (English and Spanish) AlbaeroCarlosRafael SosaNo ratings yet
- Balotario Del Examen Parcial PDFDocument1 pageBalotario Del Examen Parcial PDFMELANNY MILAGROS RAMOS CACERESNo ratings yet
- 1 Determinacion Tiempo Estandar Del Corte Cabello Peluqueria Salon Aktual C ADocument31 pages1 Determinacion Tiempo Estandar Del Corte Cabello Peluqueria Salon Aktual C AJorgeLuisSalgueroRamosNo ratings yet
- Control Logica DifusaDocument8 pagesControl Logica DifusaEfren EspinozaNo ratings yet
- Putgps U3 Ea Jocm.Document4 pagesPutgps U3 Ea Jocm.Jonathan CammarNo ratings yet
- Presentación Ejecutiva Integra TechnologiesDocument20 pagesPresentación Ejecutiva Integra TechnologiesJ. RoqueNo ratings yet
- Aprendizaje Por Refuerzo y Aplicaciones © Ediciones Roble, S.LDocument45 pagesAprendizaje Por Refuerzo y Aplicaciones © Ediciones Roble, S.Lxmkshrhd9xNo ratings yet
- Informe Banda TransportadoraDocument24 pagesInforme Banda TransportadorapiensamasNo ratings yet
- Caso GrouponDocument8 pagesCaso GrouponBarbara0% (1)
- ABC Renta CiudadanaDocument4 pagesABC Renta Ciudadananatavargas2023No ratings yet