You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- IP Based Surveillance CCTV SystemDocument49 pagesIP Based Surveillance CCTV Systemoaldwaib100% (1)
- Power Electronics Circuit Analysis and Design Second Edition by Issa Batarseh and Ahmad HarbDocument689 pagesPower Electronics Circuit Analysis and Design Second Edition by Issa Batarseh and Ahmad Harbsouza50% (2)
- Vmux ManualDocument104 pagesVmux ManualAshok KumarNo ratings yet
- 6es7321 1CH20 0aa0Document3 pages6es7321 1CH20 0aa0Fabio CavalheiroNo ratings yet
- Moduflex Power Core (16kW) Rev01Document2 pagesModuflex Power Core (16kW) Rev01Denizhan AkınNo ratings yet
- Protection Control Journal: Capacitor BankDocument92 pagesProtection Control Journal: Capacitor BankSiddharth krishnaswamyNo ratings yet
- HP Proliant Ml150 G6 Server: Installation SheetDocument8 pagesHP Proliant Ml150 G6 Server: Installation SheetStefan HeymansNo ratings yet
- Open System Interconnection Model (OSI Model)Document11 pagesOpen System Interconnection Model (OSI Model)Vicky GuptaNo ratings yet
- Zenith c32v23 Service ManualDocument81 pagesZenith c32v23 Service Manualshaft12100% (1)
- Build Your Own SeismographDocument6 pagesBuild Your Own SeismographHarris Educational100% (4)
- Labsheet 1 Embedded System ApplicationDocument7 pagesLabsheet 1 Embedded System Applicationaniq.aqlan45No ratings yet
- Adhoc Wireless and Sensor Networks: M. Tech II Semester Supplementary Examinations, February - 2014Document26 pagesAdhoc Wireless and Sensor Networks: M. Tech II Semester Supplementary Examinations, February - 2014Sreekanth PagadapalliNo ratings yet
- Metal Detector Circuit ReportDocument4 pagesMetal Detector Circuit Reportpratik kushwahaNo ratings yet
- TEMS Discovery 3.1 Description of Events and Metrics PDFDocument82 pagesTEMS Discovery 3.1 Description of Events and Metrics PDFChu Quang TuanNo ratings yet
- Ls Mop3 230Document3 pagesLs Mop3 230aglopez10No ratings yet
- 6-A, Wide-Input Adjustable Switching Regulator: Features ApplicationsDocument27 pages6-A, Wide-Input Adjustable Switching Regulator: Features ApplicationsÉcio FerreiraNo ratings yet
- Table of Contents Rms Communications IncDocument9 pagesTable of Contents Rms Communications IncAdriana SerbanNo ratings yet
- HP x360 Part PDFDocument1 pageHP x360 Part PDFmaulidinbNo ratings yet
- VHF Digital Signal Boosters 136 - 174 MHZ: Product FeaturesDocument2 pagesVHF Digital Signal Boosters 136 - 174 MHZ: Product FeaturesBao Quoc MaiNo ratings yet
- HughesNet HN9000 Satellite Modem Installation GuideDocument134 pagesHughesNet HN9000 Satellite Modem Installation GuideDony Suryo HandoyoNo ratings yet
- DataSheet - Milton Roy LMI - AD851-935SIDocument3 pagesDataSheet - Milton Roy LMI - AD851-935SIFrank RodriguezNo ratings yet
- An Overview of IEEE 1451.4 Transducer Electronic Data Sheets (TEDS)Document19 pagesAn Overview of IEEE 1451.4 Transducer Electronic Data Sheets (TEDS)annymagoNo ratings yet
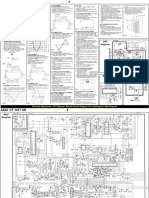
- 1 Akai CT 1417 Uk: CRT DiagramDocument2 pages1 Akai CT 1417 Uk: CRT Diagramdivubi2004No ratings yet
- WINSEM2019-20 CSE1004 ETH VL2019205001155 Reference Material I 16-Dec-2019 PROBLEMSDocument9 pagesWINSEM2019-20 CSE1004 ETH VL2019205001155 Reference Material I 16-Dec-2019 PROBLEMSADITYA SINGHNo ratings yet
- SUN2000-50KTL-M0 Smart String Inverter: Efficiency Curve Circuit DiagramDocument2 pagesSUN2000-50KTL-M0 Smart String Inverter: Efficiency Curve Circuit DiagramCH MOHAMMAD ATTIR KHAYYAMNo ratings yet
- MAX1795/MAX1796/ MAX1797 Low-Supply Current, Step-Up DC-DC Converters With True ShutdownDocument13 pagesMAX1795/MAX1796/ MAX1797 Low-Supply Current, Step-Up DC-DC Converters With True ShutdownEletrohelp EletrodomésticosNo ratings yet
- Ba40-Ba80-Ba160 Anten RFI OmniDocument1 pageBa40-Ba80-Ba160 Anten RFI OmniBao Quoc MaiNo ratings yet
- Chapter 5B: Modern CpusDocument37 pagesChapter 5B: Modern CpusAminul Islam AmuNo ratings yet
- Smartnode 10200 Series: Tdm+Voip Smart Media GatewayDocument4 pagesSmartnode 10200 Series: Tdm+Voip Smart Media GatewayJoseNo ratings yet
- Nit KKR Electronics SylabiiDocument117 pagesNit KKR Electronics Sylabiihimanshusingh.nitkkrNo ratings yet