You might also like
- 01.introduction To CorrosionDocument18 pages01.introduction To CorrosionIndah ArdiantiNo ratings yet
- CH 14 CarbonandAlloySteelsDocument42 pagesCH 14 CarbonandAlloySteelsdarwin_hua100% (1)
- Table 330.1.1 Preheat TemperaturesDocument1 pageTable 330.1.1 Preheat TemperaturesMohdBadruddinKarimNo ratings yet
- Internal Carburization and Carbide Precipitation in Fe-Ni-Cr Alloy Tubing Retired From Ethylene Pyrolysis ServiceDocument7 pagesInternal Carburization and Carbide Precipitation in Fe-Ni-Cr Alloy Tubing Retired From Ethylene Pyrolysis ServiceSergey Iakovlev67% (3)
- 6 - Sigma Training: ReviewDocument33 pages6 - Sigma Training: ReviewJuan Carlos Gebhardt100% (1)
- Pipeline Integrity 2005 PDFDocument51 pagesPipeline Integrity 2005 PDFCris Gaucho100% (1)
- FOAMGLAS Cellular Glass InsulationDocument18 pagesFOAMGLAS Cellular Glass InsulationAnton DeminNo ratings yet
- 122 Norwegian Oil and Gas Recommended Guidelines For The Mangement of Life ExtensionDocument20 pages122 Norwegian Oil and Gas Recommended Guidelines For The Mangement of Life ExtensionPar MadNo ratings yet
- Matlab Ordinary Differential Equations - Part IDocument97 pagesMatlab Ordinary Differential Equations - Part IDeepshikhaSinghNo ratings yet
- Electron Microscopy LectureDocument78 pagesElectron Microscopy LectureParag PatilNo ratings yet
- Strain Based Evaluation of Dents in Pressurized PipesDocument6 pagesStrain Based Evaluation of Dents in Pressurized Pipesmaziar60No ratings yet
- The Forms of Corrosion-Part2Document71 pagesThe Forms of Corrosion-Part2quiron2010100% (1)
- (PDF) Assessment of Corrosion Damage Acceptance Criteria in API579-ASME - 1 CodeDocument7 pages(PDF) Assessment of Corrosion Damage Acceptance Criteria in API579-ASME - 1 CodeLibardo Bahamón LiscanoNo ratings yet
- Ch3-Metal and Ceramic StructuresDocument33 pagesCh3-Metal and Ceramic StructuresAman DhapolaNo ratings yet
- Material Selection O & GDocument26 pagesMaterial Selection O & GJay Ganta100% (1)
- Api 510 Preparatory: Points To Recall - Day 2Document2 pagesApi 510 Preparatory: Points To Recall - Day 2Ranaweera AriyamanjulaNo ratings yet
- Ingenieria de La Soldadura PDFDocument11 pagesIngenieria de La Soldadura PDFedscesc10100% (1)
- 5) 5.3 Heat ExchangerDocument88 pages5) 5.3 Heat ExchangerLarbi HammounNo ratings yet
- Consumables To Match Cast & Wrought Alloy 800: Astm Bs en & DinDocument3 pagesConsumables To Match Cast & Wrought Alloy 800: Astm Bs en & Dinankitniranjan1390No ratings yet
- Polymer Nanocomposites. From Synthesis To Applications PDFDocument27 pagesPolymer Nanocomposites. From Synthesis To Applications PDFJosé SantosNo ratings yet
- PetrochmBoiler Remaning LifeDocument2 pagesPetrochmBoiler Remaning LifeEdy AeNo ratings yet
- Fracture MechanicsDocument13 pagesFracture MechanicsNishant Patil100% (1)
- O5 ReliabilityDocument68 pagesO5 ReliabilityArin NimtrakulNo ratings yet
- Pitting Crevice CorrosionDocument6 pagesPitting Crevice CorrosionMaria DelgadoNo ratings yet
- CRA Weld Overlay - Influence of Welding Process and Parameters On Dilution and Corrosion ResistanceDocument6 pagesCRA Weld Overlay - Influence of Welding Process and Parameters On Dilution and Corrosion ResistanceMichael TayactacNo ratings yet
- Sem1 2 Engineering Mathematics1 Unit1 2 3 4 5 6 7 8 PDFDocument214 pagesSem1 2 Engineering Mathematics1 Unit1 2 3 4 5 6 7 8 PDFsafyh2005No ratings yet
- Thermo-Mechanical Processing and Forming of SteelsDocument14 pagesThermo-Mechanical Processing and Forming of SteelsParth AshokNo ratings yet
- 8 Codes and Standards PDFDocument5 pages8 Codes and Standards PDFMohamed BencharifNo ratings yet
- QuenchingDocument11 pagesQuenchingOctavian CoifanNo ratings yet
- Pfeifer Group PDF Schalungstraeger Durchbiegung enDocument2 pagesPfeifer Group PDF Schalungstraeger Durchbiegung enaraboooNo ratings yet
- Cubic Boron NitrideDocument15 pagesCubic Boron Nitridekaran sahniNo ratings yet
- SES - Superheater & Reheater Outlet HeadersDocument2 pagesSES - Superheater & Reheater Outlet HeadersSES_CincinnatiNo ratings yet
- Corrosion and Runoff Behavior of Carbon Steel in Simulated Acid RainDocument3 pagesCorrosion and Runoff Behavior of Carbon Steel in Simulated Acid RainIvan GutierrezNo ratings yet
- 10-Crevice Corrosion and PittingDocument57 pages10-Crevice Corrosion and PittingRowie CarpioNo ratings yet
- Corrosion Inhibitor Qa Wells CorrosionDocument7 pagesCorrosion Inhibitor Qa Wells CorrosionpbanerjeeNo ratings yet
- Web Datasheet A6.2Document4 pagesWeb Datasheet A6.2wolf_nsNo ratings yet
- E2glite Tutorial Part1Document9 pagesE2glite Tutorial Part1linanofitaNo ratings yet
- CorrosionNotes Handout1 2017 v1 PDFDocument40 pagesCorrosionNotes Handout1 2017 v1 PDFAbdo MohdyNo ratings yet
- Characteristic of High Temperature MaterialsDocument17 pagesCharacteristic of High Temperature MaterialsMuhammad Salman AttariNo ratings yet
- HOIS (12) R8 RP For Statistical Analysis - FCDocument244 pagesHOIS (12) R8 RP For Statistical Analysis - FCDevin HardyNo ratings yet
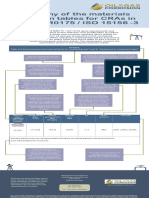
- Anatomy of The Materials Selection Tables For Cras in Nace Mr0175 / Iso 15156 - 3Document1 pageAnatomy of The Materials Selection Tables For Cras in Nace Mr0175 / Iso 15156 - 3MahsaNo ratings yet
- The Prediction of The Temperature Distribution and Weld Pool Geometry in The Gas Metal Arc Welding ProcessDocument7 pagesThe Prediction of The Temperature Distribution and Weld Pool Geometry in The Gas Metal Arc Welding ProcessAlejandra HernandezNo ratings yet
- Full Scale Experimental Analysis of Stress States in Sleeve Repairs of Gas Pipelines PDFDocument9 pagesFull Scale Experimental Analysis of Stress States in Sleeve Repairs of Gas Pipelines PDFzemog001100% (1)
- Introduction To Electron Microscopy and MicroanalysisDocument56 pagesIntroduction To Electron Microscopy and MicroanalysisPerlita2013100% (1)
- Pultrusion of Composites - An OverviewDocument15 pagesPultrusion of Composites - An OverviewAkhil DayaluNo ratings yet
- What Is New in 4th Edition of API RP 580Document8 pagesWhat Is New in 4th Edition of API RP 580MOHAMMAD RAMZANNo ratings yet
- DPVC 09 PetrobrasDocument47 pagesDPVC 09 PetrobrasClaudia MmsNo ratings yet
- CH 06 - Corrosion & ErosionDocument22 pagesCH 06 - Corrosion & ErosionvegaronNo ratings yet
- Unit IV Corrosion and Its Prevention: A.S.ThakareDocument75 pagesUnit IV Corrosion and Its Prevention: A.S.ThakareCipri Croitor0% (1)
- 885F Embrittlement of Duplex Stainless SteelDocument4 pages885F Embrittlement of Duplex Stainless Steeljaymin444No ratings yet
- Non Destructive TestingDocument25 pagesNon Destructive Testingkeval patelNo ratings yet
- FFS - ExampleProblems2021Document9 pagesFFS - ExampleProblems2021Karun NayyarNo ratings yet
- Corrosion Engineer - Refinery Position DescriptionDocument2 pagesCorrosion Engineer - Refinery Position DescriptionyagolainNo ratings yet
- What Is A Jominy End Quench Test?Document18 pagesWhat Is A Jominy End Quench Test?faqhrulNo ratings yet
- Corrosion Application Library ManualDocument230 pagesCorrosion Application Library ManualMiguel Angel Holguin MontañoNo ratings yet
- Petrochemical Engineering R16-SyllabusDocument175 pagesPetrochemical Engineering R16-SyllabusSrikanthNo ratings yet
- The Complete Guide to Telephone Interview Questions and AnswersFrom EverandThe Complete Guide to Telephone Interview Questions and AnswersNo ratings yet
- Biological Treatment of Microbial Corrosion: Opportunities and ChallengesFrom EverandBiological Treatment of Microbial Corrosion: Opportunities and ChallengesNo ratings yet